 從三個方面展開談論高精度地圖
從三個方面展開談論高精度地圖
本文談論高精度地圖,從三個方面展開。首先需要理性地了解高精度電子地圖是什么,它和傳統地圖真正的區別在哪;其次再討論高精度地圖在無人車領域是如何應用的;最后結合高精度地圖這個行業聊一聊高精度地圖所遇到的挑戰。
前言
前面的分享,將無人車上所用到的主流傳感器都做了介紹。這些傳感器都是看得到,摸不著的實物。在無人車自動駕駛的過程中,還有一種看不見、摸不到的“傳感器”也在發揮著巨大作用,它就是高精度電子地圖。
高精度電子地圖也稱為高分辨率地圖(HD Map,High Definition Map),是一種專門為無人駕駛服務的地圖。與傳統導航地圖不同的是,高精度地圖除了能提供的道路(Road)級別的導航信息外,還能夠提供車道(Lane)級別的導航信息。無論是在信息的豐富度還是信息的精度方面,都是遠遠高于傳統導航地圖的。
通過下圖,可以感性地看出傳統導航地圖與高精度電子地圖的區別。
正文
談論高精度地圖,從三個方面展開。首先需要理性地了解高精度電子地圖是什么,它和傳統地圖真正的區別在哪;其次再討論高精度地圖在無人車領域是如何應用的;最后結合高精度地圖這個行業聊一聊高精度地圖所遇到的挑戰。
高精度地圖是什么?
現階段的高精度地圖更多地被定義為:服務于無人駕駛駕駛的地圖。相比于傳統地圖的“定性”描述來說,高精度地圖是一種“定量”的描述。
以坡度為例,傳統地圖能提供的僅僅是前方有上(下)坡這個信息,但無法提供上(下)坡的角度;
以彎道為例,傳統地圖提供的僅僅是前方有個比較“急”的彎道,但無法提供彎道的曲率半徑;
以路口為例,傳統地圖提供的僅僅是前方路口有紅綠燈這個信息,并不知道紅綠燈的具體位置在哪。
...
高精度地圖可以提供傳統地圖提供不了的精確數據,這就是高精度地圖的“定量”描述。
這些定量描述對人類駕駛員駕駛汽車來說沒有多大幫助,因為人類是高度智能化的個體,擁有極高的圖像識別、信息聯想和學習能力,而這些能力這是目前無人駕駛“大腦”所不具備的。為了彌補無人駕駛“大腦”還不夠聰明的缺陷,高精度地圖挺身而出。
高精度地圖能夠為無人駕駛提供的內容如下:
車道級道路信息
傳統導航地圖只能提供道路級(Road)的導航信息,如下圖最左側所示。道路R1連接著R2,R2同時連接著R3和R4。而高精度地圖能夠提供車道級(Lane)的導航信息,這種導航信息能夠精確到車道的連接關系。如下圖中間圖所示Lane1連著Lane4,Lane4連著Lane8,;Lane3連著Lane6和Lane7,Lane7連著Lane10。
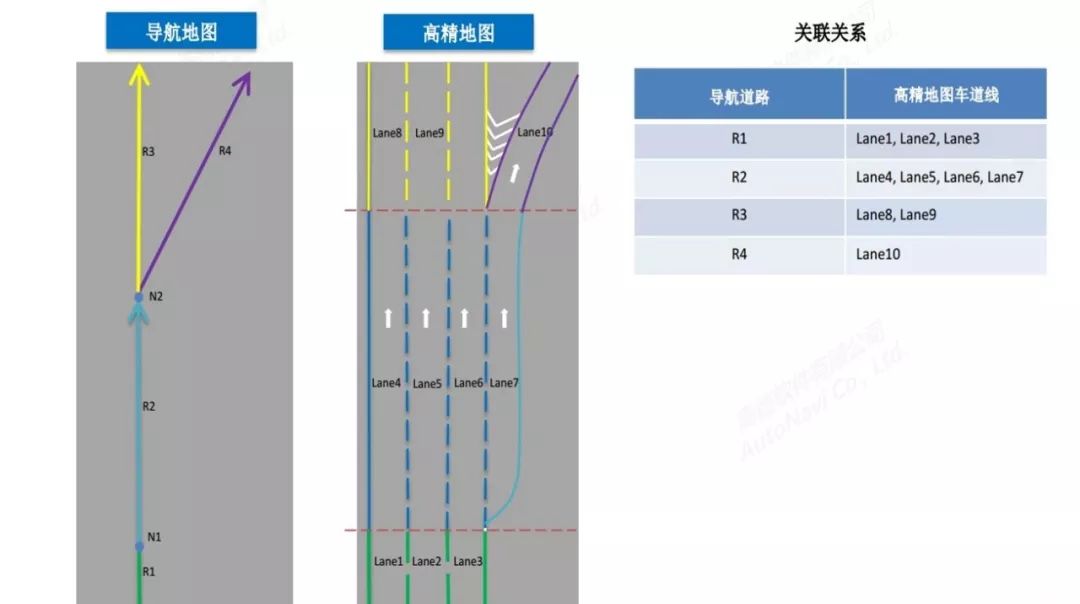
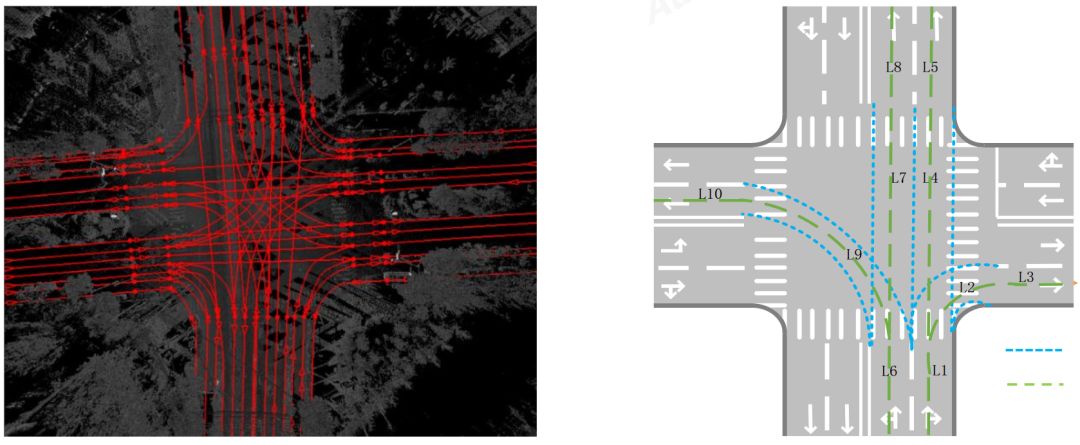
車道級別的道路信息能夠解決在路口轉彎時,無人車不知道需要轉多大的角度和保持多高車速的問題。如下圖右側綠虛線即為高精度地圖為無人車提供的虛擬車道線中心,只要提前變道到正確車道,并沿著虛擬車道線所在的車道行駛,即可順利通過路口。
道路先驗信息
先驗信息是指某些可以提前采集且短時間內不會改變的信息。
僅依靠傳感器的信息是很難感知車輛現在是處在高速公路上,還是處在普通城市道路上的;無限速牌的路段,車速最高可以開多快;前方道路的曲率;所處路段的GPS信號強弱。這些都是傳感器遇到性能瓶頸時,無法實時得到的信息。而這些信息卻都是客觀存在,不會隨外部事物的變化而變化,因此可以提前采集,并作為先驗信息傳給無人車做決策。
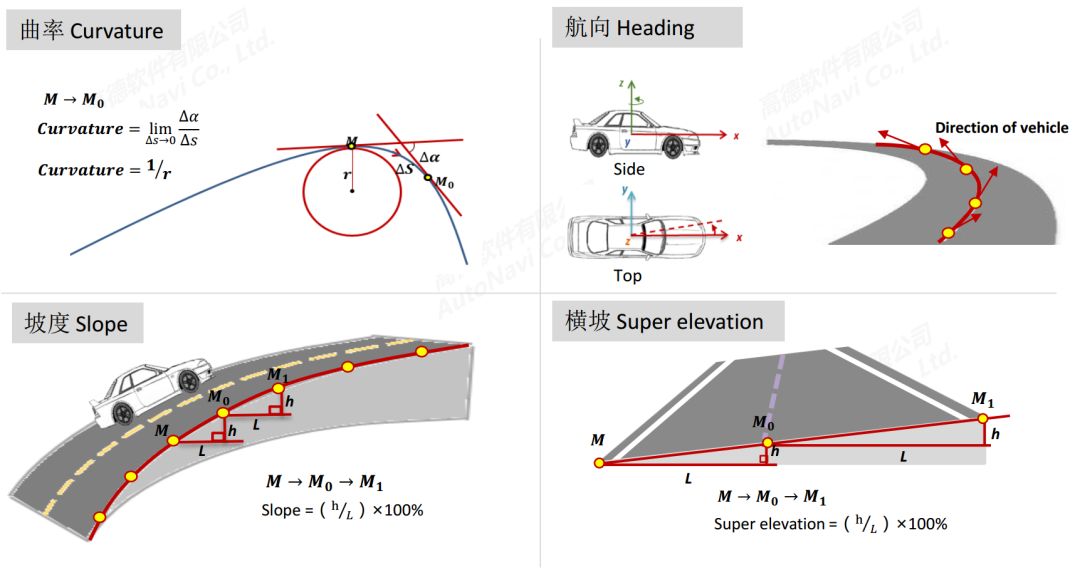
圖為高精度地圖可以為無人車提供的某些先驗信息。包括道路曲率、航向、坡度和橫坡角。這些信息對于無人車的安全性和舒適性都至關重要。
感興趣點
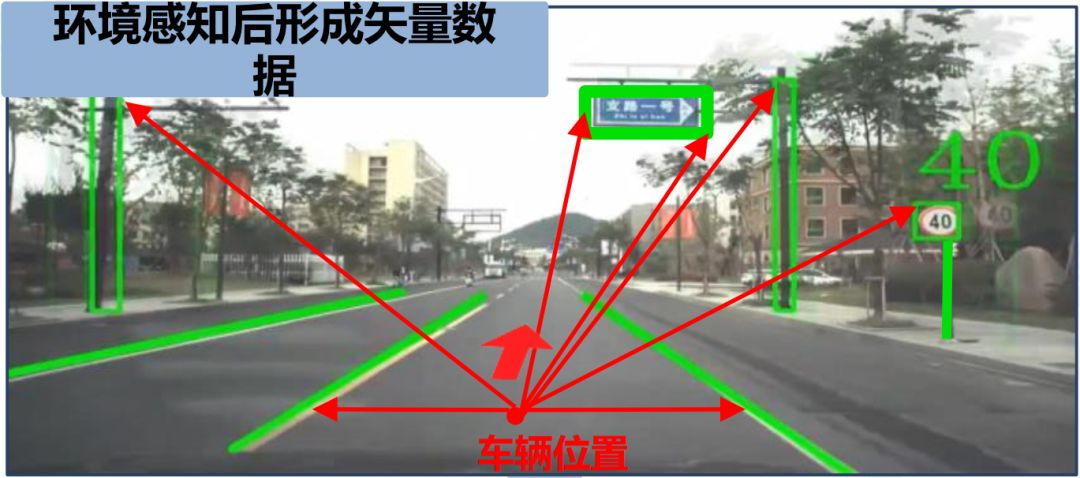
感興趣點是POI(Point of Interest)的直譯。在交通場景中能成為POI的東西有很多,比如:用中心點和多個外包絡點描述的交通標志牌、地面標志、燈桿、紅綠燈、收費站等;用一系列連續點所組成的鏈狀信息描述的路沿、護欄、隧道、龍門架、橋等。
高精度地圖精確記錄了這些POI的經緯度和高度,只要給定無人車的精確位置(經緯高),即可將各個POI相對于自車的位置計算出來。將這些POI信息的相對位置逆向投影到車載前視圖像上,如下圖所示。
到這個時候,肯定有人問:高精度地圖比傳統地圖多出如此多的信息,容量肯定很大吧?不不不。現階段的高精度地圖容量并不比傳統地圖大多少。為什么呢?
因為現階段的高精度地圖完全是為無人駕駛服務的,而傳統地圖是為人類服務的。高精度地圖只用關心與駕駛有關(道路、POI)的信息,并不關心周邊的商場有幾層、超市的面積有多大、小飯館有多少家。而這類信息剛好是人類更關心的。正是因為側重點不一樣,所以在容量方面并不會有太大的差別。
下圖從要素、系統、用途方面更為清晰地囊括了傳統地圖和高精度地圖的側重點:

高精度地圖的應用
高精度地圖只是一個靜態的數據,在實際使用時,不可能一開始就將全國的地圖導入到系統中,這樣不僅費時,而且會占用系統很多資源。高精度地圖的供應商(圖商)除了提供高精度地圖外,還會提供一個叫做“地圖引擎”的軟件。由這個軟件負責整個高精度地圖的資源調度,無人車只需要告訴“地圖引擎”現在的大致位置以及想要去的地方,“地圖引擎”就會將這個過程中所要用到的高精度地圖數據發布出來,供無人車使用。數據流如下圖所示。
高精度地圖的應用需要配合高精度的定位。
高精度定位,至少包含無人車當前的位置和航向角。位置是指無人車GPS天線安裝位置所在的經度、緯度、高度;航向角,是指無人車車頭的朝向與正北方向的夾角。
理論上,已知兩個點的經緯高,即可計算出兩個點的相對位置。那為什么還需要提供精確的航向信息呢?
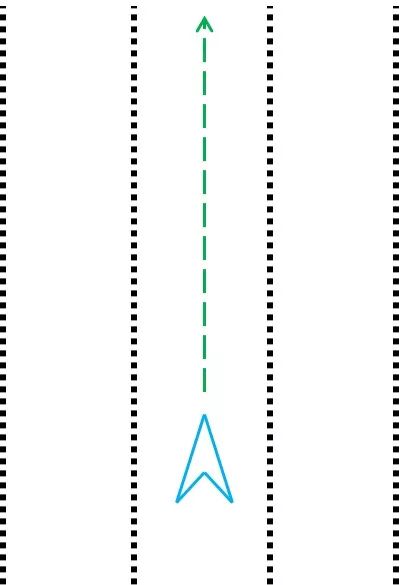
如下圖所示,如果無人車想要實現沿高精度地圖車道線直線行駛,在有正確的經緯高和航向角情況下,車道線上的一系列點在無人車坐標系下的相對關系如下圖(圖中黑點)。根據車道線規劃出來的軌跡(綠線)是與車道平行的直線。
試想一下,如果這時候航向值變得不準,比如偏了幾十度。由于經緯高沒有變化,因此車道線上的所有點距離無人車中心的距離是保持不變的,但這些點會以中心旋轉。得到的車道線在無人車坐標系下的相對關系如下圖。
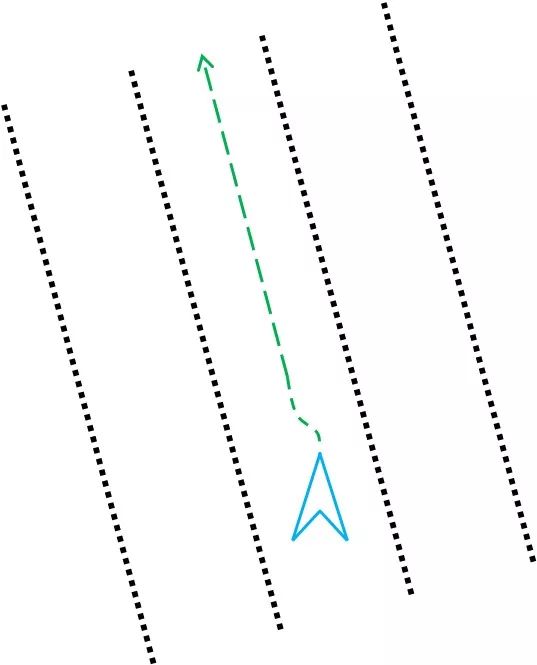
根據此車道線規劃出來的軌跡,會讓無人車認為必須要轉一個角度才能實現車道保持。最終造成的控制結果就是,無人車一直在原地打轉。由此可見無人車的航向角是很重要的定位信息。
充分利用高精度地圖的作用將對無人駕駛有如下幫助:
提升無人車的感知能力
比如,在天氣良好的情況下,車載傳感器能夠檢測出車道線、障礙物、路沿、可通行空間等,但對于道路坡度、道路曲率的檢測無能為力。這些數據有助于無人車的控制,剛好高精度地圖可以提供。
再比如,當遇到暴雨/大雪/沙塵等惡劣天氣,車載傳感器很難感知到遠處的障礙物、車道線信息。而定位+高精度地圖的配合是可以提供諸如車道線、路沿和可通行空間這些信息的,增加系統的信息冗余。
結合車載傳感器信息,提升定位精度
之前曾介紹過現有的無人車高精度定位在某些情況下也會出現定位不準的情況。因此僅依靠GPS的定位方案可靠性太差。
業內通用的定位方式是GPS+高精度地圖+攝像機(激光雷達等)信息融合的定位方法。先看一個視頻,了解一下業內是如何結合車載傳感器信息做定位的。
首先根據GPS的數據(經緯高和航向)確定無人車大致處于哪條道路上,這個位置的可能與真實位置有5~10米的差距。
根據車載傳感器檢測的車道線(虛、實線)及道路邊緣(路沿或護欄)的距離與高精地圖提供的車道線及道路邊緣做比對,然后修正無人車的橫向定位。
根據車載傳感器檢測到的廣告牌、紅綠燈、墻上的標志、地上的標志(停止線、箭頭等),與高精地圖提供的同一道路特征(POI)進行匹配,進而修正縱向定位和航向。在沒有檢測到任何道路特征的情況下,可以通過航位推算進行短時間的位置推算。
無人車的定位算法通常采用粒子濾波的方法,需要多個計算周期后,定位結果才會收斂,進而提供一個相對穩定的定位結果。粒子濾波的算法原理我會在隨后的系列文章中介紹。
高精度地圖的挑戰
挑戰一:高精度地圖的眾包
高精度地圖雖然好用,但目前還無法大規模地生產,大部分內外業處理還是由人工來完成標注和數據轉化。而且僅僅靠地圖公司的幾十上百輛采集車在道路上采集,很難保證地圖數據的實效性,即無法保證地圖數據足夠“新鮮”。
因此圖商都希望能在量產車的前裝攝像頭上做文章,讓這款攝像頭具備L2以上自動駕駛能力外,還能夠將采集圖像預處理后的數據傳到云端,實現數據的更新。當一個地點的實際情況被足夠多的私家車檢測到與地圖不符時,由圖商確認信息后,對地圖進行相應的更新。這樣一來,地圖數據迭代地足夠快,就能更好地服務于高精度地圖生態和無人車了。
挑戰二:高精度地圖的政策
地圖政策的這項挑戰僅存在于國內。
高精度地圖和國防息息相關,因此高精度地圖的采集和使用在國內是受到嚴格限制的。目前我國僅有14家單位具有甲級地圖測繪資質,這就意味著,只有這14家圖商具有高精度地圖采集和使用的權利。無人駕駛初創公司如果想使用高精度地圖,要么強依賴這14家圖商,要么在法律的紅線上做研究。
由于測繪資質政策的存在,我覺得國外的無人駕駛技術想要染指中國的市場,并不是一件簡單的事情。即便是博世這種Tier1中的大佬,沒有國內圖商的幫助,想要擴張他們的無人駕駛技術,依然會寸步難行。
結語
在高精度地圖領域有一句很有意思的話,叫做Make the invisible visible。這句話可以作為本篇分享的總結。
這篇分享的內容基本上涵蓋了大部分高精度地圖的知識以及其在無人車領域的應用。如果你對高精度地圖還有什么疑問,可以在評論區留言互動。
-
無人駕駛
+關注
關注
99文章
4156瀏覽量
122977 -
高精度地圖
+關注
關注
1文章
18瀏覽量
3102 -
車載傳感器
+關注
關注
0文章
47瀏覽量
4578
原文標題:無人駕駛技術之——看不見的“傳感器”高精度地圖
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
什么是高精度地圖?如何應用?
分析高精度道路導航地圖的發展現狀
除了測繪,未來哪些行業對高精度有需求?
四維高精度地圖獲得進展
ADI與Momenta合力加速自動駕駛高精度地圖產業化
自動駕駛基礎之高精度地圖和定位慣性測量單元IMU的詳細介紹
ADI攜手Momenta,加速無人駕駛高精度地圖產業化
高精度地圖在自動駕駛中的應用優勢是什么
高精度地圖在無人駕駛領域的作用及現狀解析
從三個方面闡述Cache
高精度地圖的路,還能走多遠?






 工商網監
工商網監
評論