 揭秘估算RMS周期間抖動及演示示例
揭秘估算RMS周期間抖動及演示示例

在這篇文章中,我將回顧一個經驗法則,該法則可用于估算RMS周期間抖動,前提是你知道RMS周期抖動。我首先在實驗室中觀察了這個經驗法則,并隨后了解了更多。
該經驗法則是什么?
該法則很簡單。如果周期抖動分布是高斯或正態分布,則周期間抖動可以根據周期抖動估算如下:
Jcc (RMS)= sqrt(3) * Jper (RMS)
我首先在定時知識庫文章中記錄了這一點,該文章是EstimatingRMS Cycle to Cycle Jitter from RMS Period Jitter (https://www.silabs.com/community/timing/knowledge-base.entry.html/2011/04/11/estimating_rms_cycle-Ab6s)。我今天會花更多時間在這個想法上,并從幾個不同的角度來解決這個問題。
問題是什么?
在我們的應用筆記“A Primer On Jitter, Jitter Measurement and Phase-Locked Loops” (https://www.silabs.com/documents/public/application-notes/AN687.pdf)中,下圖顯示了后處理相位噪聲進入定時抖動指標的下列斜率。周期抖動和周期間抖動分別顯示為20dBc / dec和40dB / dec斜率的高通濾波器。要記住這樣一個有用的例子。
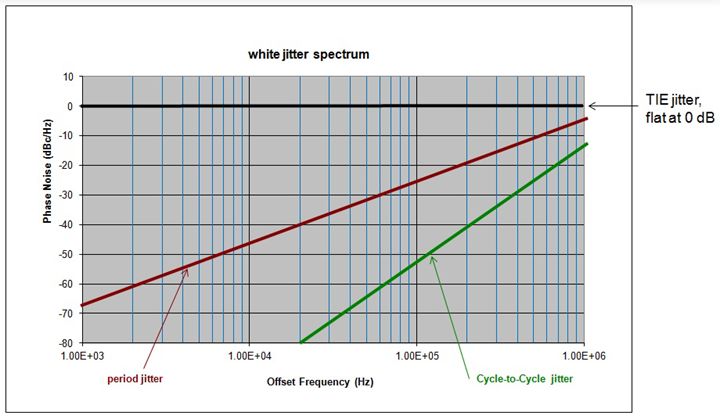
問題是,根據sqrt(3)規則,RMS周期間抖動如何大于RMS周期抖動,并且周期間抖動濾波器的斜率更陡?答案是,決定最終結果的不只是斜率。
重要術語
在繼續之前,這里有幾個來自AN279:Estimating Period Jitter from Phase Noise(https://www.silabs.com/documents/public/application-notes/AN279.pdf)的定義。
-
周期間抖動 - 相鄰時鐘周期之間的時鐘周期中的短期變化。這種抖動測量(在此縮寫為JCC)可以被特指為RMS或峰間量。
-
周期抖動 - 與平均時鐘周期相比,所有測量時鐘周期內時鐘周期的短時變化。這種抖動測量(在此縮寫為JPER)可以指定為RMS或峰間量。
實驗室測量例子
首先,下面的示例實驗測量直接來自知識庫文章。為了方便起見,帶注釋的圖像變得更加緊湊。
屏幕截圖中有三個項目被調出。
-
在100萬次循環后的周期分布呈現高斯分布,并且非常接近于分別符合±1,±2和±3標準差的68-95-99.7%規則。
-
測量的RMS周期抖動是周期抖動分布的標準偏差或約1.17 ps。因此,我們可以估算RMS周期以抖動為sqrt(3)* 1.17 ps或2.03 ps。
-
實際測量的周期到周期抖動為2.05 ps,這與估算值相當接近。
Excel演示示例
您也可以在Excel模擬中演示此規則。為了探索效果,我生成了一個電子表格,其中我選取了一個理想的時鐘邊緣,然后通過從高斯分布中采集隨機樣本來抖動邊緣。然后,我進行了周期測量和周期間測量,每個周期測量30個邊沿,每個邊沿100個,時鐘邊沿表示100MHz時鐘抖動。請注意,由于周期間抖動結果是帶符號的,即正或負,所以我們應該預期這些量的標準偏差會更大,其他都相等。100個邊緣試驗通常比30個邊緣試驗更接近sqrt(3)規則,但即使在30個邊緣上仍然可以看到總體效果。
經驗法則的解釋
那么這個經驗法則是如何產生的呢?如前所述,我多年前在實驗室首次觀察到這一點。然而,我幾乎沒有看到這方面的文字。最終我找到了StatekTechnical Note 35,An overview of oscillator jitter(http://www.statek.com/products/pdf/TN-35%20Rev%20B.pdf)。下面的解釋是這個推導的一個稍微簡化和修改的版本,其中數量是“大”時間序列的期望值(回想我對100條邊優于30條邊收斂的規則)。
讓下面的變量代表單個邊緣的時間抖動的方差,即抖動邊緣與理想邊緣的時間差異。

每個測量周期是2個連續邊緣值之間的差值,其中每個邊緣抖動具有方差s2j。周期抖動有時被稱為定時抖動的第一個差異。由于周期間抖動是相鄰周期之間的差異,所以它可以被稱為定時抖動的第二差異。
如果每個邊緣的抖動是獨立的,那么周期抖動的方差可以寫為:

這正是我們所期望的每個“差異總和法”。你可以在這里看到一個例子,它指出了對于獨立的(不相關的)變量:

然而,我們不能很容易地計算周期循環抖動,因為在每個周期到周期的測量中,我們使用兩次“內部”時鐘沿,因此我們必須考慮到這一點。相反,我們寫道:

由于每個邊緣的抖動被假定為獨立的并且具有相同的統計特性,所以我們可以放棄互相關項并寫出:

因此,差異的比例

這是一個有趣而意想不到的結果,至少對我來說:)
后處理階段噪聲
AN279:Estimating Period Jitter from Phase Noise(https://www.silabs.com/documents/public/application-notes/AN279.pdf),描述了如何根據對相位噪聲積分應用4[sin(pi* f * tau)] ^ 2權重因子,從相位噪聲中估計周期抖動。加權因子主要是+20dB / dec高通濾波器,直到在半載波頻率達到峰值。
事實證明,您可以使用類似的方法計算周期間抖動。這需要應用主要是+40dB / dec高通濾波器的{4 [sin(pi * f * tau)] ^ 2} ^ 2或16 [sin(pi * f * tau)] ^ 4加權因子,直到在半載頻處達到峰值。這正是AN687所指的。
那么如何整合一個更清晰的HPF裙,使得周期間抖動大于周期抖動和sqrt(3)規則?
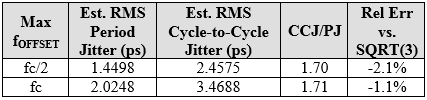
我不得不挖掘我在編寫該應用筆記時使用的舊Matlab程序。幸運的是,我仍然擁有該文件和原始數據。然后我運行該程序的修改版本,并比較maxfOFFSET的結果,其中相位噪聲數據集在fc / 2和fc處被擴展和截斷。答案是,雖然周期到周期的HPF裙子更陡峭,但最大值也更高。看下面的情節。藍色寬軌跡是周期抖動加權(濾波)相位噪聲,紅色寬軌跡是周期間抖動加權相位噪聲。這是造成差異的更大的遠偏移相位噪聲貢獻。
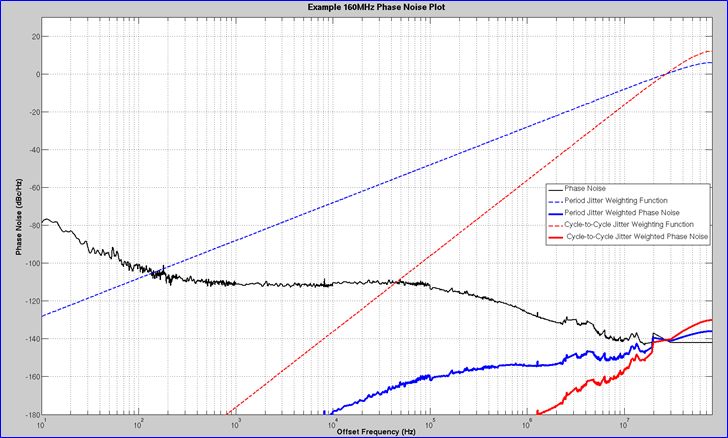
原始數據用于160 MHzCMOS振蕩器,其在約2ps時具有示波器測量周期抖動。為了保守,正是出于這個原因,我經常比fc/ 2更進一步地進行整合。現在,示波器的噪聲更低,找到待測試的原始設備并在更好的儀器上進行測量會很有趣。我的主要興趣在于看sqrt(3)關系是否成立。正如你所看到的,兩種情況下都遵循經驗法則。
結論
我希望你喜歡這篇Timing 101文章。循環周期抖動的sqrt(3)經驗法則在實驗室,Excel電子表格模擬以及后處理相位噪聲時都表現良好。
-
RMS
+關注
關注
2文章
151瀏覽量
36694 -
相位噪聲
+關注
關注
2文章
187瀏覽量
23286 -
邊緣計算
+關注
關注
22文章
3318瀏覽量
50852
原文標題:秒懂時鐘Part 8: 探討RMS周期抖動的經驗法則
文章出處:【微信號:SiliconLabs,微信公眾號:Silicon Labs】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
怎樣將相位噪聲和抖動降至最低及其估算方法
測量時鐘緩沖器的附加抖動
相位噪聲的RMS抖動
簡談數字電路設計中的抖動
相位噪聲和抖動的概念及其估算方法
估算RMS周期間抖動,經驗法則是什么?資料下載

熱阻數據的TJ估算示例

使用熱阻數據進行TJ估算的計算示例
HFAN-04.0.2:在指定BER下在RMS和峰峰值抖動之間進行轉換
相位抖動是從哪來的?通信中有哪些抖動?






 工商網監
工商網監
評論