 解密工業機器人技術之碰撞檢測
解密工業機器人技術之碰撞檢測
隨著機器人應用范圍增大,人們對機器人的要求也越來越高,尤其在機器人安全性能方面。最初研制的機器人只能完成一些簡單的重復任務,不具備人機交互能力;隨著技術的高速發展,機器人趨于智能化,能夠完成更加復雜的任務,例如噴涂、裝配、鉆孔等。
傳統的工業機器人并未配備適當的安全和碰撞檢測系統。因此,為保證機器的安全運行,往往要求配備防護欄,用于保證運行時與人隔離。
但是隨著技術發展,機器人開始承擔越來越復雜的任務。這些任務往往要求工作人員即時介入,因而使得如何實現安全的人機交互成為至關重要的問題。為保證安全,控制器需要實時檢測機器人與工作人員之間是否存在碰撞,并通過相應的控制策略保證碰撞不至于傷害工作人員。
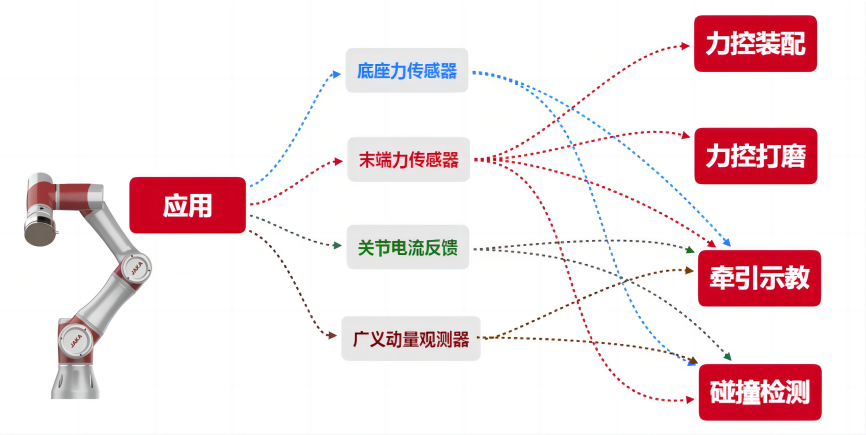
當前,大多數檢測碰撞或碰撞力都是通過添加外部傳感器實現的。
1.采用腕力傳感器來檢測碰撞:該方法可以精確檢測手抓末端的碰撞力,但無法檢測機器人其它部位的碰撞,故而檢測范圍受限,一般應用于磨削力、裝配力等手抓末端碰撞力的檢測。
2.采用感知皮膚來檢測碰撞:該方法將感知皮膚覆蓋在機器人全身,可檢測到任意部位的碰撞。但缺點在于,布線比較復雜,抗干擾能力較差,且極大的增加了處理器的運算量。凡是使用外部傳感器檢測碰撞或碰撞力的方法,都不可避免的導致系統成本和復雜程度的大幅上升。
3.采用電機的電流或者反饋的力矩來檢測碰撞:這是一種能夠廣泛應用于各種工業機器人的方案,無需額外添加傳感器,且檢測范圍能夠覆蓋機器人的整個表面。
綜上,前兩種方法均在不同程度上具有局限性,第一種方法檢測范圍受限,第二種方法布線復雜,而第三種方法則完美解決了前兩者的不足。三種方法,高下立判。
考慮到工業機器人的實際工作情況和性能要求,即利用機器人自身傳感器來檢測碰撞。
-
傳感器
+關注
關注
2553文章
51408瀏覽量
756659 -
工業機器人
+關注
關注
91文章
3374瀏覽量
92890
原文標題:工業機器人技術解密之動力學應用:碰撞檢測
文章出處:【微信號:jingzhenglizixun,微信公眾號:機器人博覽】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
虛擬裝配系統中碰撞檢測技術的研究與應用
什么是工業機器人
未來機器人發展關鍵——多傳感系統
盤點工業機器人常見的六種傳感器類型
CAD中怎么進行碰撞檢測?CAD碰撞檢測教程
怎樣去搭建機器人的仿真環境
服務型智能掃地機器人的主要功能有哪些呢
工業機器人動力學應用之碰撞測試
虛擬漫游系統中碰撞檢測技術的研究與應用
工業機器人技術之碰撞檢測系統
解密工業機器人碰撞檢測功能和防碰撞控制策略

一文讀懂:為什么碰撞檢測是協作機器人的底層技術





 工商網監
工商網監
評論