") 機器人控制系統(tǒng)詳解
機器人控制系統(tǒng)詳解
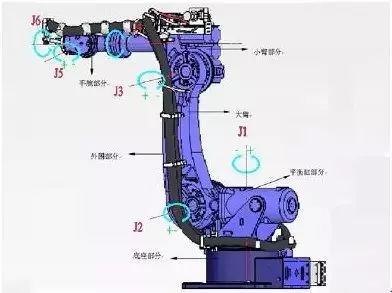
如果僅僅有感官和肌肉,人的四肢并不能動作。一方面是因為來自感官的信號沒有器官去接收和處理,另一方面也是因為沒有器官發(fā)出神經(jīng)信號,驅(qū)使肌肉發(fā)生收縮或舒張。同樣,如果機器人只有傳感器和驅(qū)動器,機械臂也不能正常工作。原因是傳感器輸出的信號沒有起作用,驅(qū)動電動機也得不到驅(qū)動電壓和電流,所以機器人需要有一個控制系統(tǒng),用硬件和軟件組成一個的控制系統(tǒng)。
機器人控制系統(tǒng)概念
機器人控制系統(tǒng)是指由控制主體、控制客體和控制媒體組成的具有自身目標(biāo)和功能的管理系統(tǒng)。控制系統(tǒng)意味著通過它可以按照所希望的方式保持和改變機器、機構(gòu)或其他設(shè)備內(nèi)任何感興趣或可變化的量。控制系統(tǒng)同時是為了使被控制對象達(dá)到預(yù)定的理想狀態(tài)而實施的。控制系統(tǒng)使被控制對象趨于某種需要的穩(wěn)定狀態(tài)。
機器人控制系統(tǒng)的功能要求
1、記憶功能:存儲作業(yè)順序、運動路徑、運動方式、運動速度和與生產(chǎn)工藝有關(guān)的信息。
2、示教功能:離線編程,在線示教,間接示教。在線示教包括示教盒和導(dǎo)引示教兩種。
3、與外圍設(shè)備聯(lián)系功能:輸入和輸出接口、通信接口、網(wǎng)絡(luò)接口、同步接口。
4、坐標(biāo)設(shè)置功能:有關(guān)節(jié)、絕對、工具、用戶自定義四種坐標(biāo)系。
5、人機接口:示教盒、操作面板、顯示屏。
6、傳感器接口:位置檢測、視覺、觸覺、力覺等。
7、位置伺服功能:機器人多軸聯(lián)動、運動控制、速度和加速度控制、動態(tài)補償?shù)取?/p>
8、故障診斷安全保護功能:運行時系統(tǒng)狀態(tài)監(jiān)視、故障狀態(tài)下的安全保護和故障自診斷。
機器人控制系統(tǒng)的主要種類
控制系統(tǒng)的任務(wù),是根據(jù)機器人的作業(yè)指令程序、以及從傳感器反饋回來的信號,支配機器人的執(zhí)行機構(gòu)去完成的運動和功能。 假如機器人不具備信息反饋特征,則為開環(huán)控制系統(tǒng);若具備信息反饋特征,則為閉環(huán)控制系統(tǒng)。
根據(jù)控制原理可分為程序控制系統(tǒng)、適應(yīng)性控制系統(tǒng)和人工智能控制系統(tǒng)。
根據(jù)控制運動的形式可分為點位控制和軌跡控制。
工業(yè)機器人控制系統(tǒng)組成
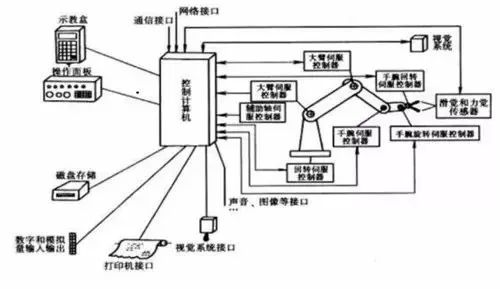
1、控制計算機:控制系統(tǒng)的調(diào)度指揮中心機構(gòu)。
2、示教盒:示教機器人的工作軌跡和參數(shù)設(shè)定,以及所有人機交互操作,擁有自己獨立的CPU以及存儲單元,與主計算機之間以串行通信方式實現(xiàn)信息交互。
3、操作面板:由各種操作按鍵、狀態(tài)指示燈構(gòu)成,只完成基本功能操作。
4、硬盤和軟盤存儲存:儲機器人工作程序的外圍存儲器。
5、數(shù)字和模擬量輸入輸出:各種狀態(tài)和控制命令的輸入或輸出。
6、打印機接口:記錄需要輸出的各種信息。
7、傳感器接口:用于信息的自動檢測,實現(xiàn)機器人柔順控制,一般為力覺、觸覺和視覺傳感器。
8、軸控制器:完成機器人各關(guān)節(jié)位置、速度和加速度控制。
9、輔助設(shè)備控制:用于和機器人配合的輔助設(shè)備控制,如手爪變位器等。
10通信接口:實現(xiàn)機器人和其他設(shè)備的信息交換,一般有串行接口、并行接口等。
11、網(wǎng)絡(luò)接口
1)Ethernet接口:可通過以太網(wǎng)實現(xiàn)數(shù)臺或單臺機器人的直接PC通信,數(shù)據(jù)傳輸速率高達(dá)10Mbit/s,可直接在PC上用windows庫函數(shù)進行應(yīng)用程序編程之后,支持TCP/IP通信協(xié)議,通過Ethernet接口將數(shù)據(jù)及程序裝入各個機器人控制器中。
2)Fieldbus接口:支持多種流行的現(xiàn)場總線規(guī)格,如Devicenet、ABRemoteI/O、Interbus-s、profibus-DP、M-NET等。
機器人控制系統(tǒng)結(jié)構(gòu)方式
集中控制系統(tǒng)
用一臺計算機實現(xiàn)全部控制功能,結(jié)構(gòu)簡單,成本低,但實時性差,難以擴展,在早期的機器人中常采用這種結(jié)構(gòu),其構(gòu)成框圖,如圖所示。
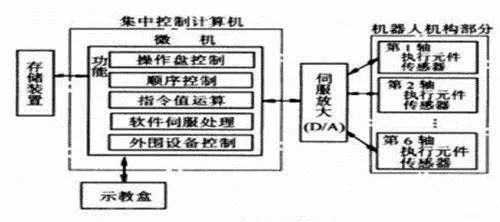
基于PC的集中控制系統(tǒng)里,充分利用了PC資源開放性的特點,可以實現(xiàn)很好的開放性:多種控制卡,傳感器設(shè)備等都可以通過標(biāo)準(zhǔn)PCI插槽或通過標(biāo)準(zhǔn)串口、并口集成到控制系統(tǒng)中。
集中式控制系統(tǒng)的優(yōu)點是:硬件成本較低,便于信息的采集和分析,易于實現(xiàn)系統(tǒng)的最優(yōu)控制,整體性與協(xié)調(diào)性較好,基于PC的系統(tǒng)硬件擴展較為方便。
其缺點也顯而易見:系統(tǒng)控制缺乏靈活性,控制危險容易集中,一旦出現(xiàn)故障,其影響面廣,后果嚴(yán)重;由于機器人的實時性要求很高,當(dāng)系統(tǒng)進行大量數(shù)據(jù)計算,會降低系統(tǒng)實時性,系統(tǒng)對多任務(wù)的響應(yīng)能力也會與系統(tǒng)的實時性相沖突;此外,系統(tǒng)連線復(fù)雜,會降低系統(tǒng)的可靠性。
主從控制方式
采用主、從兩級處理器實現(xiàn)系統(tǒng)的全部控制功能。主CPU實現(xiàn)管理、坐標(biāo)變換、軌跡生成和系統(tǒng)自診斷等:從CPU實現(xiàn)所有關(guān)節(jié)的動作控制。其構(gòu)成框圖,如圖所示。
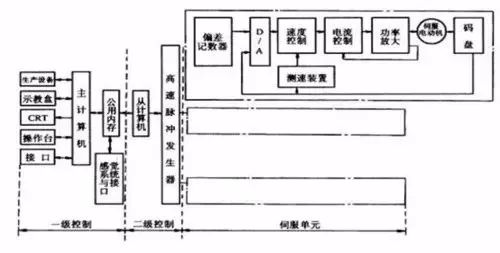
主從控制方式系統(tǒng)實時性較好,適于高精度、高速度控制,但其系統(tǒng)擴展性較差,維修困難。
分散控制方式
按系統(tǒng)的性質(zhì)和方式將系統(tǒng)控制分成幾個模塊,每一個模塊各有不同的控制任務(wù)和控制策略,各模式之間可以是主從關(guān)系,也可以是平等關(guān)系。這種方式實時性好,易于實現(xiàn)高速、高精度控制,易于擴展,可實現(xiàn)智能控制,是目前流行的方式,其控制框圖如圖所示。
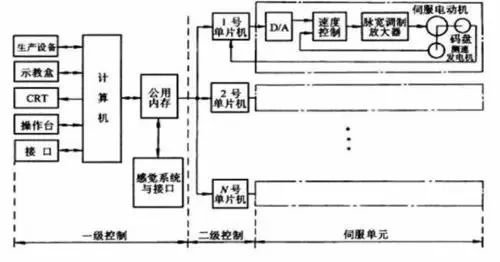
其主要思想是“分散控制,集中管理”,即系統(tǒng)對其總體目標(biāo)和任務(wù)可以進行綜合協(xié)調(diào)和分配,并通過子系統(tǒng)的協(xié)調(diào)工作來完成控制任務(wù),整個系統(tǒng)在功能、邏輯和物理等方面都是分散的,所以又稱為集散控制系統(tǒng)或分散控制系統(tǒng)。
這種結(jié)構(gòu)中,子系統(tǒng)是由控制器和不同被控對象或設(shè)備構(gòu)成的,各個子系統(tǒng)之間通過網(wǎng)絡(luò)等相互通訊。分布式控制結(jié)構(gòu)提供了一個開放、實時、精確的機器人控制系統(tǒng)。分布式系統(tǒng)中常采用兩級控制方式。
兩級分布式控制系統(tǒng)
通常由上位機、下為機和網(wǎng)絡(luò)組成。上位機可以進行不同的軌跡規(guī)劃和控制算法,下位機進行插補細(xì)分、控制優(yōu)化等的研究和實現(xiàn)。上位機和下位機通過通訊總線相互協(xié)調(diào)工作,這里的通訊總線可以是RS-232、RS-485、EEE-488以及USB總線等形式。
現(xiàn)在,以太網(wǎng)和現(xiàn)場總線技術(shù)的發(fā)展為機器人提供了更快速、穩(wěn)定、有效的通訊服務(wù)。尤其是現(xiàn)場總線,它應(yīng)用于生產(chǎn)現(xiàn)場、在微機化測量控制設(shè)備之間實現(xiàn)雙向多結(jié)點數(shù)字通信,從而形成了新型的網(wǎng)絡(luò)集成式全分布控制系統(tǒng)—現(xiàn)場總線控制系統(tǒng)。
分布式控制系統(tǒng)的優(yōu)點在于:系統(tǒng)靈活性好,控制系統(tǒng)的危險性降低,采用多處理器的分散控制,有利于系統(tǒng)功能的并行執(zhí)行,提高系統(tǒng)的處理效率,縮短響應(yīng)時間。
機器人控制系統(tǒng)分類
1、程序控制系統(tǒng):給每一個自由度施加一定規(guī)律的控制作用,機器人就可實現(xiàn)要求的空間軌跡。
2、自適應(yīng)控制系統(tǒng):當(dāng)外界條件變化時,為保證所要求的品質(zhì)或為了隨著經(jīng)驗的積累而自行改善控制品質(zhì),其過程是基于操作機的狀態(tài)和伺服誤差的觀察,再調(diào)整非線性模型的參數(shù),一直到誤差消失為止。這種系統(tǒng)的結(jié)構(gòu)和參數(shù)能隨時間和條件自動改變。
3、人工智能系統(tǒng):事先無法編制運動程序,而是要求在運動過程中根據(jù)所獲得的周圍狀態(tài)信息,實時確定控制作用。
4、點位式控制系統(tǒng):要求機器人準(zhǔn)確控制末端執(zhí)行器的位姿,而與路徑無關(guān)。
5、連續(xù)軌跡控制系統(tǒng):要求機器人按示教的軌跡和速度運動。
6、控制總線:國際標(biāo)準(zhǔn)總線控制系統(tǒng)。采用國際標(biāo)準(zhǔn)總線作為控制系統(tǒng)的控制總線,如VME、MULTI-bus、STD-bus、PC-bus。
7、自定義總線控制系統(tǒng):由生產(chǎn)廠家自行定義使用的總線作為控制系統(tǒng)總線。
8、編程方式:物理設(shè)置編程系統(tǒng)。由操作者設(shè)置固定的限位開關(guān),實現(xiàn)起動,停車的程序操作,只能用于簡單的拾起和放置作業(yè)。
9、在線編程:通過人的示教來完成操作信息的記憶過程編程方式,包括直接示教模擬示教和示教盒示教。
10、離線編程:不對實際作業(yè)的機器人直接示教,而是脫離實際作業(yè)環(huán)境,示教程序,通過使用高級機器人,編程語言,遠(yuǎn)程式離線生成機器人的作業(yè)軌跡。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6659瀏覽量
110888 -
機器人
+關(guān)注
關(guān)注
211文章
28642瀏覽量
208424
原文標(biāo)題:【深度】一文讀懂機器人的大腦——控制系統(tǒng)
文章出處:【微信號:robotn,微信公眾號:產(chǎn)業(yè)大視野】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
如何系統(tǒng)性地學(xué)習(xí)工業(yè)機器人技術(shù)?
嵌入式服務(wù)機器人控制系統(tǒng)能實現(xiàn)什么功能?
基于CAN總線和雙傳感器仿人機器人運動控制系統(tǒng)的研究
有關(guān)機器人控制系統(tǒng)的基本知識都總結(jié)好了
關(guān)于機器人控制系統(tǒng)的這幾方面知識你必須掌握
機器人系統(tǒng)與控制需求簡介
機器人的控制系統(tǒng)
通過多軸工業(yè)機器人來聊聊機器人控制系統(tǒng)以及控制器的實現(xiàn)
機器人控制系統(tǒng)的特點分析
基于PLC的機器人伺服運動控制系統(tǒng)設(shè)計詳解
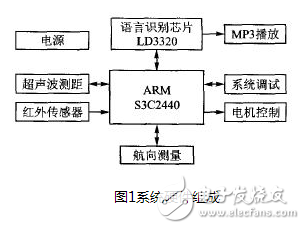
以嵌入式處理器S3C2440為核心的多任務(wù)機器人控制系統(tǒng)設(shè)計詳解





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論