 關于位置式PID控制系統結構分析
關于位置式PID控制系統結構分析

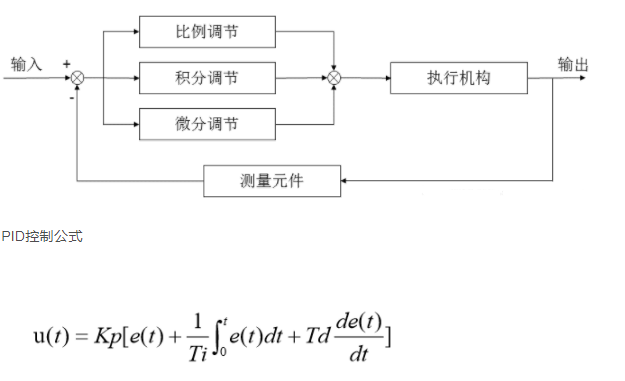
其中,Kp為比例系數,Ti為積分時間常數,Td為微分時間常數,u0是邊差為O時的控制作用,是控制量的基準,如原始閥門開度、基準電壓等。
在控制中,計算機只能根據采樣時刻的偏差值計算控制量,因此上式中的積分和微分項都不能直接使用,需要進行離散化處理。即將描述連續系統的微分方程代之以等效的描述離散系統的差分方程,得到相應的數字PID調節器。
連續時間r用一系列的采樣時刻點盯代替,采用矩形法進行數值積分,以求和代替積分,以差分代替微分,得到相應的離散PD表達式。為書寫方便,將e(k)簡化成e(k)得到位置式算式:

k:采樣信號,k=0,1.2。
u(k):第庀次采樣時刻的計算機輸出值。
e(k):第庀次采樣時刻輸入的偏差值。
e(k-1):第(k-1)次采樣時刻輸入的偏差值。
Ti;:積分時間常數。
Td:微分時間常數。
位置式PID控制系統結構圖如圖所示。
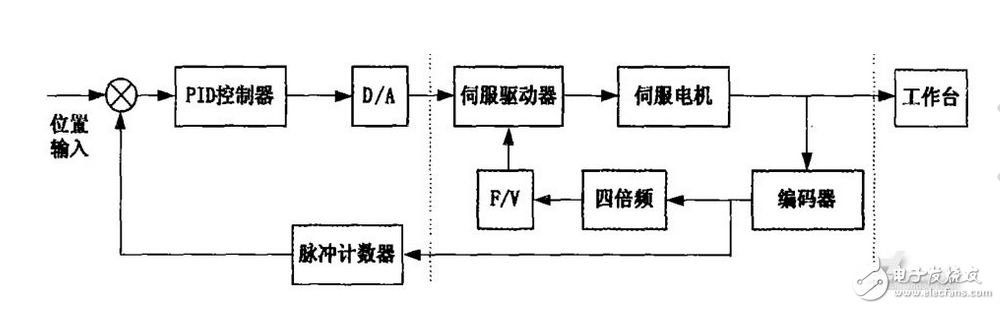
圖 位置式PID控制系統
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制系統
+關注
關注
41文章
6764瀏覽量
111847 -
PID控制
+關注
關注
10文章
461瀏覽量
41062
發布評論請先 登錄
相關推薦
熱點推薦
用LaBVIEW實現步進電機PID控制系統
和圖標/連接器。圖3為步進電機控制系統前面板,圖4為步進電機控制系統框圖程序。從框圖程序中可知,整個程序結構是一個while循環,其內部結構分為4個模塊:數據采集及數字濾波模塊;
發表于 04-09 09:40
教你用C語言實現位置式PID和增量式PID
,對那些噪聲較大的系統一般不用微分, 或在微分起作用之前先對輸入信號進行濾波。ⅢPID算法代碼 PID 控制算法可以分為位置
發表于 05-30 08:00
位置式PID控制算法研究
由51單片機組成的數字控制系統控制中,PID控制器是通過PID控制算法實現的。51單片機通 過AD對信號進行采集,變成數字信號,再在單片機中
發表于 03-16 15:26
?153次下載
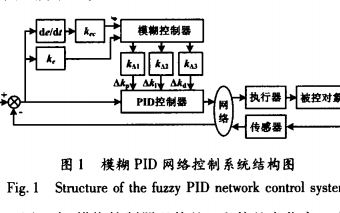
模糊PID網絡控制系統有什么作用詳細的仿真分析資料概述
為了研究網絡控制系統的特性,結合PID結構簡單、穩定性好和模糊控制適應性強的特點,設計了模糊PID網絡
發表于 12-27 08:00
?5次下載
什么是PID?位置式PID與增量式PID有何不同
PID 實指“比例 proportional”、“積分 integral”、“微分 derivative”,這三項構 成 PID 基本要素。每一項完成不同任務,對系統功能產生不同的影響。它的
如何使用PID控制算法優化控制系統
當涉及到控制系統中的精確調節和穩定性,PID(比例-積分-微分)控制算法是一種不可或缺的工具。本文將簡單介紹 PID 控制算法,從基本概念到





 工商網監
工商網監
評論