") 將DSP+CPLD結(jié)合實現(xiàn)全數(shù)字化交流伺服控制系統(tǒng)的設計
將DSP+CPLD結(jié)合實現(xiàn)全數(shù)字化交流伺服控制系統(tǒng)的設計
在現(xiàn)代運動控制進程中,實時測控系統(tǒng)對高速數(shù)字信號處理是出了更高的要求,為了滿足世界范圍內(nèi)運動控制系統(tǒng)的需要,TI公司推出了一種面向高性能、高精度工業(yè)控制領域的32位定點DSP控制器TMS320F2810,在x240基礎上性能提高了10倍,用軟件實現(xiàn)數(shù)據(jù)處理,功能更強大,算法更靈活,多達128k字的FLASH E2PROM、2k字的ROM,能夠滿足大計算量、運算速度高的要求,CPLD是一種復雜可編程邏輯器件,采用計算機輔助設計技術(shù)把設計生成的數(shù)據(jù)文件夾配置進芯片內(nèi)部的靜態(tài)數(shù)據(jù)存儲器(SPAM)來完成,具有可重復編程性,可以靈活配置硬件邏輯電路,降低了PCB板的空間和復雜度。將DSP+CPLD結(jié)合并應用與伺服電機控制中,加以改進的控制算法和硬件結(jié)構(gòu),使整個電機控制系統(tǒng)達到民快速性和穩(wěn)定性的要求。
系統(tǒng)結(jié)構(gòu)
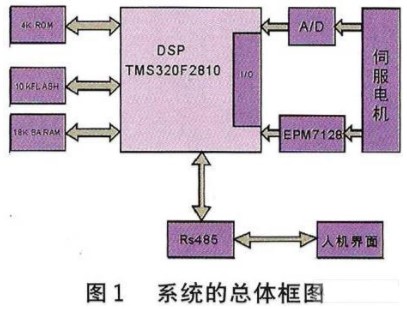
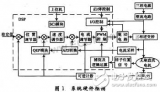
整個控制系統(tǒng)的被控對象為三相120°四級永磁同步電機,編碼器為混合式光電編碼器,采用差分傳遞以提高抗干擾能力。處理器采用為數(shù)字控制系統(tǒng)專用的TMS320F2810芯片,它是整個控制系統(tǒng)的核心,主要負責控制策略和控制算法的實現(xiàn),并與人機界面進行通信,實現(xiàn)系統(tǒng)的數(shù)據(jù)處理,對伺服系統(tǒng)進行保護和報警顯示等功能,人機界面的核心處理芯片為周立功單片機的7289顯示芯片,主要負責向DSP發(fā)送轉(zhuǎn)速給定、控制參數(shù)給定、啟動/停止信息等,并實時顯示驅(qū)動系統(tǒng)的數(shù)據(jù)變化。另外,在硬件控制板塊中采用了ALTERA的CPLD-EPM7128,是為某種專門邏輯功能和時序功能而設計的集成芯片,將外部光電編碼器信號等邏輯輸入、輸出引用端等PCB設計完成的大部分工作集成放在芯片設計中進行。這樣不僅可以通過芯片設計實現(xiàn)各種邏輯功能,而且由于端子定義的靈活性,大大減輕了電路設計的工作量和難度,從而有效地增強了設計的靈活性,提高了工作效率,便于系統(tǒng)的二次開發(fā)。系統(tǒng)的總體框圖如圖1所示:
CPLD的設計
永磁伺服電機穩(wěn)定運行時,其同步轉(zhuǎn)速以及轉(zhuǎn)子位置可以通過與轉(zhuǎn)子同步的光電編碼器所產(chǎn)生的脈沖信號來反映,因光電編碼器產(chǎn)生的脈沖信號含有諧波成份,毛刺較多,為防止DSP讀到誤碼,將轉(zhuǎn)速、位置脈沖信號送到CPLD邏輯判斷濾除干擾信號,同時在起保護DSP的作用。由于篇幅有限,舉例轉(zhuǎn)速脈沖信號U+、U-的軟件處理,其VHDL語言描述如下:
process (U+,U-,U,ERR)
begin
if(U+=’0’and U-=’1’)
then U<=U+,ERR=0;
elsif(U+=’0’ and U-=’0’)
then U<=Z, ERR=1;
elsif(U+=’1’ and U-=’0’)
then U<=U-, ERR=0;
elsif(U+=’1’ and U-=’1’)
then U<=Z,ERR=1;
end;
控制方法原理
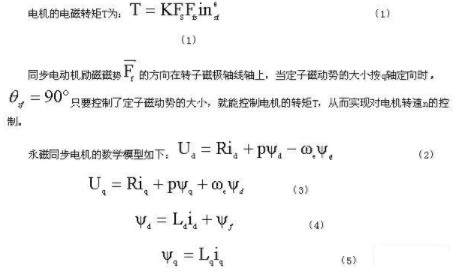
在伺服系統(tǒng)中,通過對交流永磁同步電機電磁轉(zhuǎn)矩的控制,可使電機角位置、速度、加速度滿足指令信號的要求,電機的電磁轉(zhuǎn)矩與電機電壓、電流的關系是多變量、非線性的。交流電機矢量控制策略是解決這一難題的有效手段。

多了個1.5倍的系數(shù)是因為坐標變換采用了幅值不變原則而不是功率不變原則。當id=0時,Te=1.5Npψfiq,即通過控制iq就可以線性地控制電磁轉(zhuǎn)矩。系統(tǒng)控制環(huán)路結(jié)構(gòu)如圖2所示。
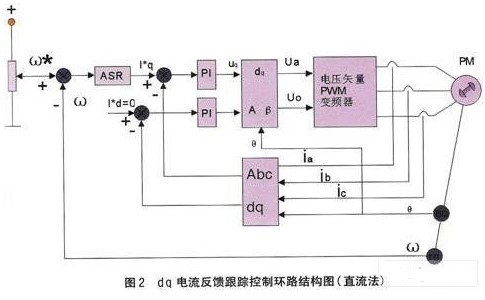
dq軸電流的控制是通過dq軸電壓的控制來完成的。但dq軸電壓無法直接輸出,需要轉(zhuǎn)換到三相靜止坐標系中輸出,見圖2系統(tǒng)反饋控制環(huán)路圖。
軟件算法實現(xiàn)
在考慮軟件設計時,必須緊緊依賴其硬件核心F2810的基礎上,要保證工作的實時性,軟件的靈活性和可靠性,軟件設計也采用模塊化設計方法。該軟件主要包括三個部分:初始化模塊、系統(tǒng)控制模塊和通信模塊。下面結(jié)合例子介紹DSP實現(xiàn)SVPWM的控制以及軟件實現(xiàn)方法。
空間矢量的計算
當空間合成矢量U out以Oαβ坐標系上的分量形式U out、U outβ給出時,先用下式計算成本B0、B1、B2:
B0=U outβ
B1=sin60°U outα-sin30°U outβ
B2=-sin60°U outα-sin30°U outβ
再用下式計算扇區(qū)號
P=4sign(B2)+2sign(B1)+sign(B0)式中:sign(x)是符號函數(shù)。如果x>0,sign(x)=1;如果x<0,sign(x)=0。采用F2810進行空間矢量的計算,軟件實現(xiàn)如下:
If Vref1>0
{A=1;else A=0;}
If Vref2>0
{B=1; else B=0;}
If Vref3>0
{C=1;else C=0;}
Scetor=4C+2B+A
變量運算
為了能夠采用定點處理器實現(xiàn)浮點運算,系統(tǒng)軟件必須采用適當?shù)亩ū砀袷荆紤]到各種系統(tǒng)參數(shù),本系統(tǒng)選用Q12定表格示。
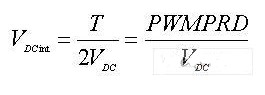
注釋:當DSP定時器采用連續(xù)增/減計數(shù)方式,周期寄存器的周期值等于T/2。
其中VDC為母線直流電壓,V DC in t為電壓定標系數(shù),T為PWM的中斷周期。
時間參數(shù)飽和計算
當根據(jù)逆變器單獨輸出零矢量O000和O111時,電動機的定子磁鏈矢量ψ是不動的。根據(jù)這個特點,在TPWM期間插入零矢量作用的時間t0,使TPWM=t0+t1+t2。其中t0為零矢量導通的時間,t1、t2分別為合成目的矢量相鄰60°定子矢量的作用時間。當計算的飽和時,也即t1+t2>TPWM時,軟件實現(xiàn)如下:
結(jié)語
經(jīng)過大量實驗證明,本控制系統(tǒng)將數(shù)字信號處理器與可編程邏輯器件相結(jié)合控制效果良好,可靠邊性高,穩(wěn)定性好,為批量化生產(chǎn)奠定了堅實的基礎。主要優(yōu)點列舉如下:
·系統(tǒng)性能提高,由于高速的集成控制器的應用,提高了系統(tǒng)的精度,響應速度,靜動態(tài)性能以及穩(wěn)定性;
·可編程能力強,用可編程控制器件實現(xiàn)的控制,算法易于用軟件實現(xiàn),調(diào)試維護方便,而且易于系統(tǒng)的升級;
·較高的集成度,大大減少了控制系統(tǒng)的體積,節(jié)省了現(xiàn)場空間;
·節(jié)省能源,環(huán)保;
·可操作性強,具有友好的人機界面。
-
處理器
+關注
關注
68文章
19480瀏覽量
231483 -
dsp
+關注
關注
554文章
8062瀏覽量
351077 -
cpld
+關注
關注
32文章
1257瀏覽量
169733
發(fā)布評論請先 登錄
相關推薦
全數(shù)字化超聲成像技術(shù)
基于DSP的弧焊逆變電源數(shù)字化控制系統(tǒng)
基于DSP的弧焊逆變電源數(shù)字化控制系統(tǒng)
基于DSP的數(shù)字伺服機構(gòu)控制系統(tǒng)設計
求一種基于DSP+CPLD的全數(shù)字化控制系統(tǒng)的實現(xiàn)方案
交流伺服電機在數(shù)字控制系統(tǒng)中的應用
ARM+DSP+CPLD實現(xiàn)數(shù)字化電阻焊機控制系統(tǒng)

基于TMS320LF2407直接轉(zhuǎn)矩控制系統(tǒng)的全數(shù)字化實現(xiàn)
應用F2812實現(xiàn)全數(shù)字交流伺服電機控制系統(tǒng)
TMS320LF2407直接轉(zhuǎn)矩控制系統(tǒng)的全數(shù)字化實現(xiàn)
基于TMS320LF2407直接轉(zhuǎn)矩控制系統(tǒng)的全數(shù)字化實現(xiàn)
DSP無刷直流電機全數(shù)字化控制系統(tǒng)解析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論