 基于JFET實現放大倍數精確調節并可程控的放大電路設計
基于JFET實現放大倍數精確調節并可程控的放大電路設計
對微弱信號的程控放大,傳統的方法是采用可軟件設置增益的放大器如AD8321 芯片,但該類放大器價格較高且選擇檔位較少。采用數字電位器或者模擬開關和AD* 組成的多檔位、低成本的程控放大器可克服以上缺點,但是模擬開關具有較大的噪聲且存在偏置電阻,精度不高使用D/A 內部電阻實現可變電阻也是較為常用的方法, 利用DAC 內部精密電阻網絡作為運放的反饋電阻提高了放大精度,但這種方案難以實現連續調節。基于結型場效應管的程控放大器采用時鐘頻率為100MHz 的C8051F020 單片機實現閉環控制, 能實時調節輸出,實現對輸入信號的精確放大。通過D/A改變場效應管的柵源極之間的電壓以調節壓控電阻,可變電阻范圍大,噪聲低,采用較復雜的軟件系統彌補了線性度不高的問題,較高的精度滿足實際應用需要。
1 程控放大器原理
壓控放大模塊要求實現1~100 倍放大,然后與前置放大模塊組合實現100~1000 倍的信號放大。
采用D/A 控制以場效應管為核心的可變電阻可實現該設計要求。場效應管的源漏極電壓UDS 小于1V,UGS 不變時,ID 隨UDS 的增加而增加, 與電阻的特性一致,并且UGS 改變時ID-UDS 曲線的斜率跟著改變。這就是說, 場效應管可以用作一個受UGS 控制的壓控電阻。
本設計將場效應管接入運放的T 型反饋網絡,使運放的等效反饋電阻隨場效應管的DS 間電阻的變化而變化,如圖1 所示。

圖1 壓控放大電路
反饋電阻為:

為了確保場效應管DS 之間的電壓小于1V,取R1=R2:

壓控放大電路放大倍數為:

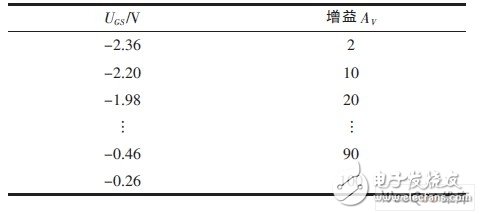
經過多次試驗,選取R1=200,R2=200,R3=1,R4=390。改變場效應管柵極電壓,測量輸入、輸出,并計較得到放大倍數AV 的范圍為1 ~112 之間, 對20Hz~20kHz 的正弦信號進行多次測量和分析,柵級電壓與增益的具體對應關系如表1 所示。
表1 場效應管GS 電壓值與增益關系
以輸入和放大倍數為坐標反映到曲線圖上如圖2 所示。
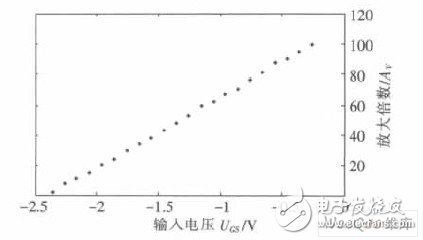
圖2 輸入電壓與放大倍數關系散點圖
由圖可知輸入電壓與放大倍數近似成線性關系,經線性擬合后得到函數關系:

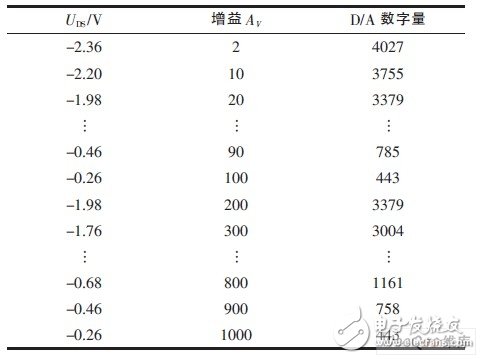
UGS取值范圍-2.38V~0V, 如果采用12 位D/A控制UGS, 參考電壓取2.4V 則可實現0.001V 步進,數字信號通過D/A 轉化為模擬信號,其輸出經反向后接到結型場效應管G 極,由于R1、R2對稱使場效應管工作在可變電阻區,源極和漏極間的等效電阻由G 極的電壓即D/A 輸出電壓控制,場效應管源極和漏極的電阻變化會引起反饋電阻的變化。UDS 增益、AV 及數字量D/A 間對應關系如表2 所示。
單片機D/A 輸出電壓0~2.4V,故需外接運放將輸出反向,輸出電壓范圍為-2.4V~0V,可滿足要求。
表2 UDS增益、AV及D/A 數字量之間的對應關系
2 電路設計
2.1 總體方案的設計及組成
系統主要由單片機控制模塊、前置放大電路模塊、D/A 轉換模塊、壓控放大模塊、有效值轉換、A/D采樣模塊和顯示電路等組成。
2.2 總體結構
控制器選用C8051F020 單片機, 內部集成12位A/D、D/A 和鎖相環,最高工作頻率100MHz,選用低噪聲、頻帶寬和放大能力好的放大器AD* 做為前置放大器,AD* 能夠放大最小信號為25μV。有效值轉換選用精度高的AD637,AD637 能夠采集0V~2V 之間的信號,系統方框圖如圖3 所示。
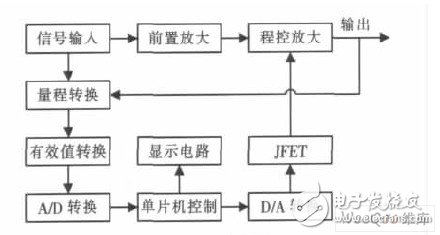
圖3 系統框圖
2.3 模塊方案論證
2.3.1 前置放大模塊
前置放大部分對輸入信號進行10 倍放大,當輸入信號十分微弱時,通常會淹沒在噪聲中,這就要求前置放大電路具有高共模抑制比、高輸入阻抗、低噪聲等特性。系統采用精密儀表放大器AD*,它具有很高輸入阻抗, 能有效抑制信號源與傳輸網絡阻抗不對稱引入的誤差,單位增益帶寬25MHz,適用于寬頻帶測量系統,共摸抑制比高達130dB,等效輸入噪聲小于4nV/Hz, 輸入失調電壓溫度漂移只有0.25μV/℃,能有效抑制共模干擾引入的誤差,提高信噪比和系統的精度; 具有較高的增益及較寬的增益調節范圍,可適用信號源電平較寬的范圍。
AD* 是高精度低噪聲儀用放大電路,它可用在不同傳感器輸出信號的放大系統中。AD* 除給定100、200、500 的固定增益外,還可將3 腳與其它相連得到不同固定增益。該集成放大器通過內部高精度電阻器設置了1,100,200,500,1000 等管腳增益,并可通過連接適當的增益得到多種組合增益值。
還可通過外部電阻器任意設定增益值,如圖4 所示。
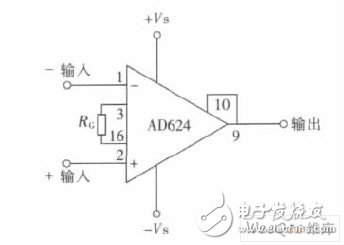
圖4 增益值的設定
圖中,在腳3 與16 之間連接電阻RG,其阻值為:

其中:AV為放大器增益。為達到最好效果,RG應選用低溫度系數的精密電阻器。

取RG=4.44k,即可得到10 倍的前置放大。
2.3.2 壓控放大模塊
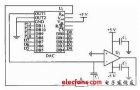
單片機內部12 位D/A 輸出0~2.4V 直流信號,而結型場效應管需要-2.4~0V 信號, 因此需要對D/A 輸出信號取反。T 型反饋網絡的電阻分別取R1=200,R2=200,R3=1,具體實現電路如圖5 所示。
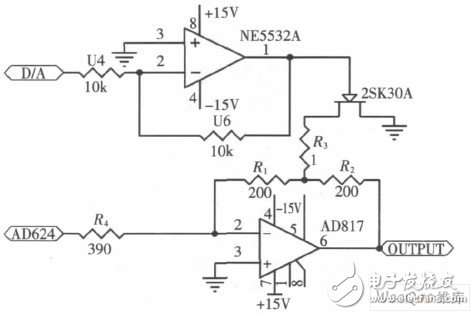
圖5 壓控放大電路設計
2.3.3 有效值轉換
有效值轉換電路采用AD637 專用芯片計算電流和電壓的有效值,能簡化軟件設計,而且轉換精度達到0.1%。
一個交變信號的有效值定義為:
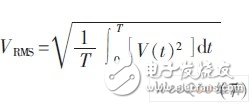
其中:VRMS為信號的有效值;T 為測量時間;V(t)是信號的波形,V(t)是一個時間的函數,但不一定是周期性的。
對等式的兩邊進行平方得:

右邊的積分項可以用一個平均來近似:

式(8)可以簡化為:

等式兩邊除以VRMS得:

系統采用AD637 有效值檢測器將輸入的交流電壓信號轉換為直流電壓,然后通過A/D 轉換器送給單片機處理。AD637 有效值轉換如圖6 所示。
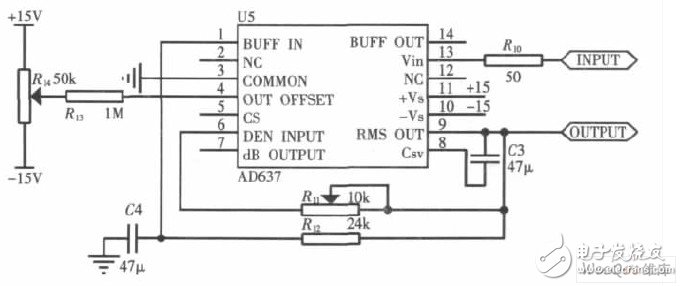
圖6 有效值轉換電路
3 系統軟件設計
軟件部分完成各個部分的控制和協調。本系統軟件由主程序和子程序組成, 主要完成系統初始化、液晶顯示初始化、繼電器控制、數模轉換、數據采集和數據處理。主要由主程序和顯示子程序等組成。如圖7 所示。
系統軟件設計中,采用模塊設計法,功能模塊各自獨立,使得程序結構清晰。首先對系統各模塊初始化,12 位A/D、D/A 均采用C8051F020 內部參考電壓2.4V,繼電器切換到輸入端測量經AD* 放大后的輸入信號,若測量值大于200mV,說明輸入信號超過20mV,設置1 倍前置放大,然后根據輸入信號的大小判斷量程,調節D/A 輸出控制JFET,繼電器切換到輸出端采集輸出信號,根據輸入輸出進行系統自調節。考慮到溫度對結型場效應管影響,為了不增加復雜硬件電路,對系統采用軟件補償。
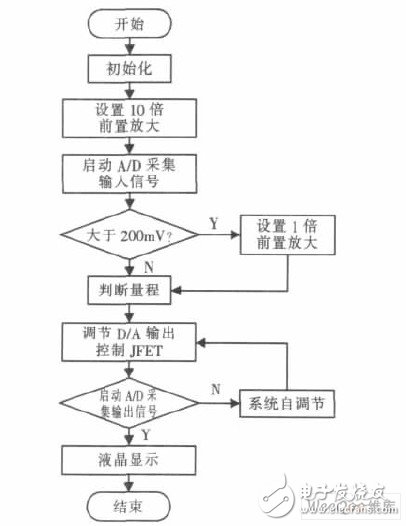
圖7 程控放大器主程序流程圖。
4 系統測試
4.1 系統測試及結果分析
放大倍數測試,是通過示波器把輸入信號的峰峰值和輸出信號的峰峰值測出來,然后相比較:

其中:AV為放大倍數;VO為輸出信號峰峰值;Vi為輸入信號峰峰值。
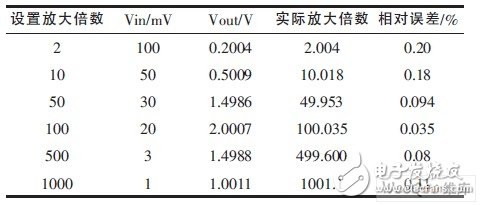
電路本身的非線性、結型場效應管受溫度影響、電阻的熱穩定性差等因素造成了系統的非線性誤差,如表3 所示,系統的最大非線性誤差為0.2%,精度較高。
表3 改變輸入信號峰峰值測試結果
設置放大倍數為50, 調節輸入的峰峰值為20mV,改變輸入頻率,測量輸出信號,如表4 所示。
表4 改變輸入信號頻率測試結果
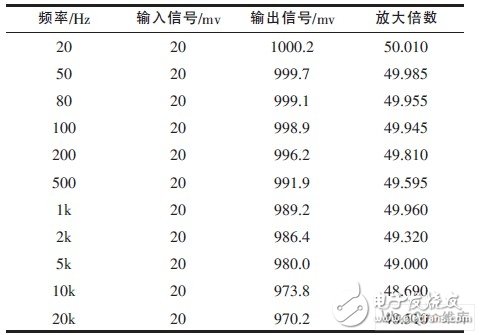
測試結果顯示,系統在頻帶0~20kHz 內的增益誤差小于3%,共模抑制比超過2×106。
4.2 誤差分析
測量時, 選用高精度示波器所測的數值為標準。誤差產生的原因除了溫度影響外主要有輸入信號比較小,本身就含有一定的干擾信號,這是誤差產生的一個原因,其次因為結型場效應管受溫度影響會產生一定的誤差,示波器測量時測量值會跳動,給讀取測量結果帶來一定的誤差。
為減小溫度影響帶來的誤差, 對整個系統進行軟件補償, 在1~100 之間取點, 相鄰兩點之間認為D/A 輸出與運放的放大倍數滿足線性關系, 實驗中取了24 個點,實驗結果與實測結果較近,在整個范圍內極大地減小了誤差,而且取點越多誤差就越小。
5 結語
系統應用C8051F020 單片機,采用基于結型場效應管壓控放大電路實現對小信號的放大和采集,有效抑制噪聲,采用場效應管實現的可變電阻變化范圍大,克服了數字電位器、模擬開關等有觸點放大電路的噪聲問題,配合復雜軟件,實現了對放大倍數的精確控制,是一款低噪聲高精度的小信號可程控放大器,可適應頻率在一定范圍變化的模擬信號,因此能夠在自動控制系統、智能儀器儀表中得到應用。
-
電阻
+關注
關注
86文章
5573瀏覽量
173050 -
單片機
+關注
關注
6044文章
44651瀏覽量
640187 -
場效應管
+關注
關注
47文章
1176瀏覽量
64659
發布評論請先 登錄
相關推薦

DAC程控放大電路







 工商網監
工商網監
評論