") 采用A3P250器件實現(xiàn)汽車油改氣系統(tǒng)的設計
采用A3P250器件實現(xiàn)汽車油改氣系統(tǒng)的設計
隨著全球資源短缺、環(huán)境污染和生態(tài)環(huán)境的惡化,汽車與環(huán)境的相容性研究已經(jīng)成為汽車發(fā)展研究的主題。天然氣汽車具有排放污染顯著降低、燃料經(jīng)濟性好、安全性高、發(fā)動機壽命長等優(yōu)點,因此被認為是未來最有前途的一種汽車燃料。在這種強大的市場需求驅(qū)動下,油改氣方案勢在必行,可以根據(jù)汽車外部采集的數(shù)據(jù)對其進行分析、研究與設計。
1 系統(tǒng)總體結(jié)構(gòu)
本系統(tǒng)以FPGA為中心,主要包括以下部分:(1)信號采集部分:包括一系列的汽車傳感器,實時獲取發(fā)動機各項參數(shù);(2)ECU模塊:系統(tǒng)的控制核心;(3)執(zhí)行機構(gòu):實時執(zhí)行ECU的控制指令,使發(fā)動機正常工作;(4)人機交互界面設計:完成上下位機之間異步串行通信,實時觀測系統(tǒng)運行狀況。圖1為系統(tǒng)總體結(jié)構(gòu)圖。

2 FPGA主要模塊實現(xiàn)
根據(jù)汽車電控單元的需求,設計選用的FPGA是ACTEL公司基于非易失性Flash技術的A3P250器件(100-VQFP)。器件采用了精細顆粒架構(gòu)VersaTile,具有250K系統(tǒng)門結(jié)構(gòu),采用了130 nm的工藝技術,內(nèi)核電壓1.5 V,時鐘頻率48 MHz。A3P250是反熔絲的,抗輻射、耐高低溫、功耗低、速度快,應用較廣。FPGA功能模塊描述語言主要包括時鐘邏輯模塊、A/D采樣控制模塊、模糊控制模塊、步進電機控制模塊、PWM產(chǎn)生模塊、UART通信模塊等。系統(tǒng)設計模塊如圖2所示。

2.1 時鐘邏輯模塊
該設計中,外部輸入的時鐘為48 MHz,由于設計中需要多種不同的時鐘信號, 所以必須設計一個可根據(jù)采集需要任意分頻的時鐘邏輯模塊,且必須準確,才能保證整個系統(tǒng)的正常工作。同時采用同步時序電路,它是基于時鐘觸發(fā)沿設計,對時鐘的周期、占空比、延時、抖動提出了更高的要求。分頻器是FPGA設計中使用頻率非常高的基本單元之一。通過自主設計進行時鐘分頻的實現(xiàn)方法靈活性好,節(jié)省系統(tǒng)硬件資源,而且這種方式只消耗不多的邏輯單元就可以實現(xiàn)對時鐘操作的目的。
2.2 采樣控制模塊
ADC0809轉(zhuǎn)換模塊程序流程圖如圖3所示。數(shù)據(jù)采集系統(tǒng)的輸入信號多數(shù)都于現(xiàn)場傳感器的輸出信號,傳感器種類不一,致使信號特性也不同。各通道信號的幅度與頻率范圍有很大的不同,高精度的、大動態(tài)范圍的A/D轉(zhuǎn)換芯片使設計更能滿足測量的需要, 特別是對寬頻帶弱信號的采集顯得尤其必要。本設計中A/D轉(zhuǎn)換模塊選用了ADC0809和AD16 7 4芯片,ADC0809主要用于節(jié)氣門信號采集,兩片AD16 7 4芯片主要用于實際轉(zhuǎn)速信號和設定轉(zhuǎn)速信號的采集。
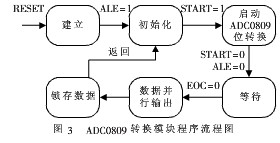
2.2.1 ADC0809轉(zhuǎn)換控制模塊
當FPGA啟動數(shù)據(jù)采集時,掃描時鐘便開始工作,同時掃描周期計時器和采樣周期計時器開始計時。48 MHz時鐘經(jīng)過FPGA分頻得到500 kHz的CLK作為ADC0809的驅(qū)動時鐘,利用狀態(tài)機實現(xiàn)對A/D的控制,采集過程完全按照A/D的工作時序。當單次A/D采集完成,便立即更新地址寄存器和數(shù)據(jù)寄存器。轉(zhuǎn)換完后將按照此次任務規(guī)定的采集參數(shù)進入A/D芯片前的采集模擬電路建起,等待下次采樣周期到來。
2.2.2 AD1*轉(zhuǎn)換控制模塊
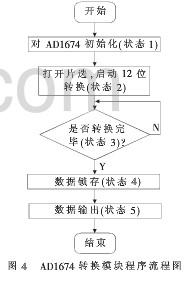
AD16 7 4是帶有內(nèi)部采樣保持的完全12位逐次逼近(SAR)型模/數(shù)轉(zhuǎn)換器,支持單極性和雙極性輸入兩種工作方式,轉(zhuǎn)換時間為10 μs。根據(jù)實際工作需要,使用了雙極性輸入方式。AD16 73在FPGA的時鐘信號clk、復位信號rst、狀態(tài)信號status及控制信號cs、k12x8、rc、a0的控制下采集數(shù)據(jù)。AD16 7 4轉(zhuǎn)換器模塊是根據(jù)摩爾狀態(tài)機實現(xiàn)的,完成對實際轉(zhuǎn)速信號的采樣,F(xiàn)PGA計算出誤差和誤差變化率,然后查模糊控制表,最后將控制量變換到實際控制量上。根據(jù)實際工作需要,采用兩片AD16 7 4,一片采集汽車發(fā)動機實際轉(zhuǎn)速信號,另一片采集汽車設定轉(zhuǎn)速信號。AD16 7 4轉(zhuǎn)換模塊程序流程圖如圖4所示。
2.3 模糊控制模塊設計
在怠速狀況下,盡量使汽車穩(wěn)定在最低轉(zhuǎn)速以節(jié)省資源并減少排放。設計了一種基于FPGA的汽車ECU的模糊控制器,只需在線修改模糊控制規(guī)則表就可以做成不同精度和不同控制規(guī)則的模糊控制器,具有通用性,控制規(guī)則實現(xiàn)簡單。模糊控制模塊由Verilog HDL語言實現(xiàn),可以隨時對系統(tǒng)進行升級和移植,非常靈活和方便。模糊控制模塊包含運算模塊和模糊控制規(guī)則表模塊。
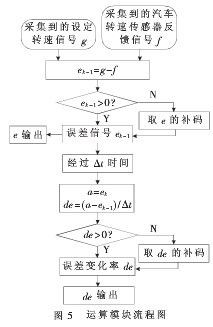
運算模塊主要是將采集到的汽車設定轉(zhuǎn)速信號g與采集到的汽車發(fā)動機轉(zhuǎn)速傳感器反饋信號f進行處理,計算出汽車轉(zhuǎn)速誤差e和轉(zhuǎn)速誤差變化率de。圖5所示為運算模塊流程圖。
模糊控制規(guī)則表模塊的功能是把輸入的精確量進行尺度變換,變換到相應的論域范圍;將已變換到論域范圍的輸入量進行模糊化處理,主要是計算各個輸入量的隸屬度,為了簡化處理,將輸入值進行均勻量化。確定模糊控制的原則是必須保證模糊控制器的輸出能夠使系統(tǒng)輸出響應的動靜態(tài)特性達到最佳,既要迅速消除誤差,保證響應的的快速性,又要防止產(chǎn)生超調(diào)和振蕩,保證系統(tǒng)的穩(wěn)定性。例如,汽車轉(zhuǎn)速誤差為負大(NB)時,若誤差變化率為負中(NM),這時汽車轉(zhuǎn)速還有進一步增大的趨勢。為了盡快消除已有的負大誤差,并抑制誤差進一步變大,控制量的變化應取負大(NB),以盡快減小汽車的轉(zhuǎn)速。模糊控制規(guī)則表如表1所示。

根據(jù)表1,模糊控制規(guī)則表用Verilog HDL描述如下:
if ((e==NB)&&(de==NB)) u<=NB;
else if((e==Z)&&(de==Z)) u<=ZE;
……
總共49條控制規(guī)則,其中NB、NM、NS、Z、PS、PM、PB分別對應一段輸入的誤差、誤差變化率的范圍。還可以對汽車轉(zhuǎn)速誤差和轉(zhuǎn)速誤差變化率論域進一步細分,得到更精確的結(jié)果,仿真結(jié)果如圖6所示。其中,out為輸出的控制量,可以看出變化規(guī)律與理論上模糊控制規(guī)則表一致。

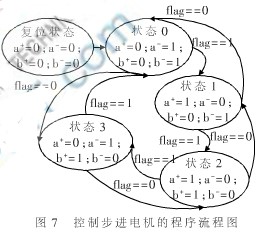
out對應的是步進電機的步數(shù),用于后面生成脈沖信號。步進電機的正反轉(zhuǎn)是基于前端的模糊控制模塊輸出信號控制的,控制單元實時檢測汽車發(fā)動機的轉(zhuǎn)速并與設定的目標轉(zhuǎn)速進行比較。當轉(zhuǎn)速低于設定值時,控制步進電機正轉(zhuǎn),開大旁通氣道截面,增加進氣量,缸內(nèi)的可燃混合氣增多,轉(zhuǎn)速上升;反之,轉(zhuǎn)速高于設定轉(zhuǎn)速時,控制步進電機反轉(zhuǎn),旁通氣閥關小,缸內(nèi)混合氣減少,轉(zhuǎn)速下降,最終使汽車發(fā)動機的轉(zhuǎn)速穩(wěn)定在目標轉(zhuǎn)速附近。步進電機的控制程序是基于狀態(tài)機設計的,程序流程圖如圖7所示。正轉(zhuǎn)st0->st1->st2->st3->st0,反轉(zhuǎn)st0->st3->st2->st1->st0。發(fā)動機轉(zhuǎn)速傳感器采集到實際轉(zhuǎn)速反饋信號,與設定轉(zhuǎn)速信號進行運算,得到誤差和誤差變化率,再去查模糊控制規(guī)則表,從而形成了一個閉環(huán)控制系統(tǒng),可見該系統(tǒng)具有實時跟蹤的性能和自我校正的功能。
為了驗證系統(tǒng)的效果,在MATLAB中搭建數(shù)學模型,進行模擬,結(jié)果如圖8所示。
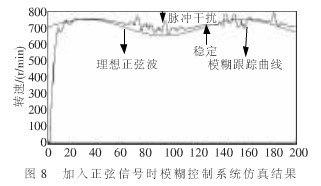
由圖8可知,一般情況下工作比較穩(wěn)定,當系統(tǒng)設定速度的給定值在650 r/min到750 r/min之間,根據(jù)無負荷自動變換,系統(tǒng)可以快速跟蹤其變化。當有干擾時,加入階躍分別在100和155,可以看出經(jīng)過干擾以后,由于負荷的變化,轉(zhuǎn)速突然下降20 r/min,系統(tǒng)經(jīng)過一段時間調(diào)節(jié)后,很快就上升到原來的穩(wěn)定值。仿真結(jié)果表明:采用模糊控制方法不僅有效,而且降低轉(zhuǎn)速的波動幅度,進一步提高了運行的穩(wěn)定性,初步顯示了模糊控制的良好效果;同時,系統(tǒng)具有很強的抗干擾能力,為下一步實際應用,改善汽車的排放性,提高燃氣利用率打下了良好的基礎。該系統(tǒng)能夠?qū)崟r地進行現(xiàn)場控制,具有很強的實用價值。
2.4 PWM產(chǎn)生模塊設計
噴氣PWM波脈寬產(chǎn)生是根據(jù)查表法實現(xiàn)的。FPGA采集的轉(zhuǎn)速信號和節(jié)氣門開度信號經(jīng)過計算求出某時刻對應的噴氣脈寬對應的地址,輸出相應的PWM波。
為了適應各種不同的噴氣設備,ECU出來的四路PWM波設計為根據(jù)實際情況可以隨時調(diào)整。特點為:(1)四個缸的工作頻率及占空比是一樣的,經(jīng)實際測量,在汽車運行狀態(tài)下T0為10~35 ms。(2)頻率會根據(jù)油門的開閉大小變化,不固定。(3)脈沖為-12 V電平。(4)特殊情況,在汽車轉(zhuǎn)速達到4 000轉(zhuǎn)時,波形發(fā)生變化,脈沖有交錯。根據(jù)燃氣的使用效果,發(fā)現(xiàn)只要把原先的脈寬T1適當縮短,縮短的時間可調(diào),就能達到最佳的效果。不過,脈沖的起始時間不能變;頻率是根據(jù)氣門的變化而變化的。在油改氣的時候,頻率不能變。
PWM測量和減短仿真圖如圖9所示,圖中虛線豎條的時間間隔為1.310 75 ms,為了明顯起見,在圖中固定減去了1.5 ms輸出,在實際應用過程中,這個值可以根據(jù)需要,通過電位器將電壓輸入至FPGA器件,根據(jù)需要進行調(diào)整。
2.5 通信模塊以及仿真結(jié)果
根據(jù)RS232異步串行通信的幀格式,在FPGA發(fā)送模塊中采用的每一幀格式為:1位開始位+8位數(shù)據(jù)位+1位停止位,波特率為9 600 b/s。由設置的波特率可以算出分頻系數(shù),具體算法為分頻系數(shù)X=CLK/(BOUND×2)。串行數(shù)據(jù)通信仿真圖如圖10所示。

該系統(tǒng)不但實現(xiàn)了數(shù)據(jù)采集,通過模糊控制為噴氣裝置產(chǎn)生了包含點火時間以及噴氣脈寬的PWM波,實現(xiàn)了系統(tǒng)的穩(wěn)定性和實時性,同時能夠?qū)崟r采集轉(zhuǎn)速信號和節(jié)氣門開度信號并通過UART傳送到上位機,實時地進行監(jiān)測和控制。
-
FPGA
+關注
關注
1643文章
21982瀏覽量
614560 -
PWM
+關注
關注
116文章
5409瀏覽量
218274 -
步進電機
+關注
關注
152文章
3161瀏覽量
149221
發(fā)布評論請先 登錄
奔馳擬取消“油改電”,EQ品牌即將成為歷史,all in純電才是正途?
油價下降了,升級速改LED大燈,加滿油,春游走起!
請問車載GPS定位器如何遠程控制汽車斷油斷電的?
干油噴射潤滑系統(tǒng)
燃料油熱值儀鍋爐油大卡分析儀適用環(huán)境
等效時間采樣技術的原理作用及采用FPGA器件實現(xiàn)系統(tǒng)的設計
基于FPGA的汽車油改氣電控系統(tǒng)的研究與設計
基于A3P125和SDRAM實現(xiàn)多功能、高分辨率顯示方案
改18650充電器,實現(xiàn)1A電流充電
電動汽車和新能源油改電汽車有什么區(qū)別
順時而生的"油改電"車型究竟有哪些弊端
基于PLC的售油控制系統(tǒng)設計與實現(xiàn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論