 GPS衛星的軌道參數外推計算方法的研究
GPS衛星的軌道參數外推計算方法的研究
1 、軌道參數的計算
模擬器的一項關鍵任務就是要連續生成導航電文,包括星歷、歷書和UTC數據。其中,通過GPS接收機接收或從GPS的官方網站上下載得到的歷書和UTC參數滿足模擬器的設計要求,但接收或下載得到的星歷數據則需經過外推。本節即利用攝動力方程以及拉格朗日行星運行方程推導計算了星歷數據中的6個軌道參數(a,e,i,Ω,ω,M),并對其進行仿真驗證。
1.1 軌道參數的計算
將V在軌道參數上展開,根據拉格朗日行星運行方程對其求導,最終可得時刻歷元t對應的6個軌道參數:
式中:X(t0)為初始歷元t0對應的X值,其中X∈(a,e,i,Ω,ω,M);X(t)為仿真歷元t對應的X值;a為橢圓軌道長半軸;e為橢圓軌道偏心率;i為軌道面傾角;Ω為升交點赤徑;ω為近地點角距;M為平近點角;p=a(1-e2)
![]()
為帶,J2擾動項的軌道平均角速度。最終,歷元時刻t對應的所有星歷數據均可通過上述6個軌道參數計算得到。
1.2 仿真驗證
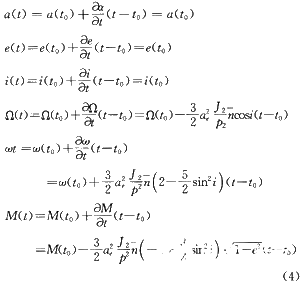
圖1為從IGS網站下載得到的2005-4-20,0:0:0.00歷元時刻的RINEX格式的星歷文件,設定用戶接收機位置(經度、緯度、高程)為(113°19′00″E、39°00′08″N、100 m),各軌道面相對赤道平面約為55°傾角。
通過推導計算圖3中所有參數,可以得到不同軌道面的GPS星座分布圖、衛星地跡隨時間的變化規律和GDOP值,上述3組仿真結果證明外推得到的衛星軌道參數符合模擬器的性能要求。
1.3 GPS星座分布圖
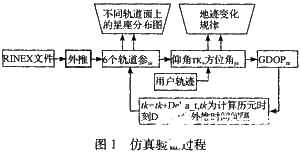
圖2為歷元時刻2005-4-20,0:00:0.00的軌道參數對應的GPS衛星星座分布圖。該圖表明,6個軌道面以60°間隔均勻分布,每個軌道平面上以90°間隔均勻分布4顆工作衛星。從而外推得到的衛星星座分布符合真實GPS衛星星座分布。
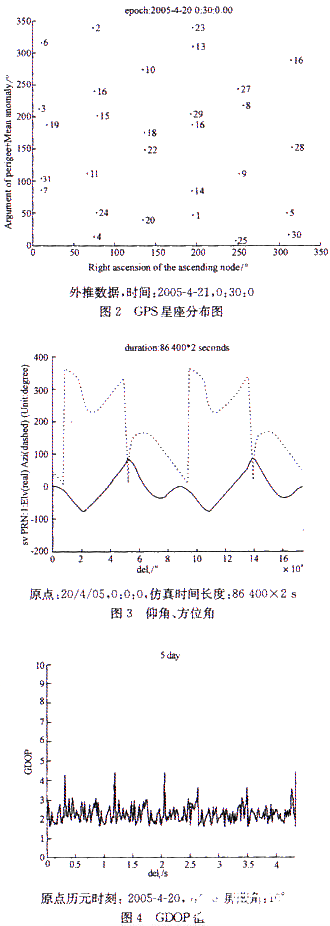
圖3為外推得到的1號衛星的仰角(實線)和方位角(虛線)在24 h內隨時間的變化規律。由圖可知,1號衛星的運行周期為11 h58″,地面觀察者可以在第二天提前4′在地球上同一地點看到同樣一顆衛星。
這里僅圖示了一顆工作衛星仰角和方位角的變化規律,其他工作衛星的仰角和方位角也符合同樣的變化規律。如圖所示,外推確定的衛星的仰角和方位角隨時間的變化規律與真實GPS衛星變化規律相符。
圖4為外推得到的星座分布的GDOP值。在該仿真過程中,每隔1 800 s計算一組軌道參數,所得GDOP值在1.5和5之間。因此,外推得到的軌道參數對GPS接收機可用。
綜上,外推得到的6個軌道參數確定的衛星星座分布及變化規律符合真實GPS衛星運行規律,其計算方法滿足GPS信號模擬器的設計及性能要求。
2 、結 論
通過對作用在GPS衛星上的地球中心引力以及主要攝動力進行分析,本文給出了GPS衛星6個軌道參數的外推計算方法。最后通過仿真計算,說明了計算得到的衛星軌道參數滿足模擬器的設計及性能要求。
責任編輯:gt
-
gps
+關注
關注
22文章
2967瀏覽量
168590 -
仿真
+關注
關注
51文章
4245瀏覽量
135379 -
衛星
+關注
關注
18文章
1755瀏覽量
68202
發布評論請先 登錄
微軟研究手機GPS新技術 較目前節電99.96%
基于移動區間的GPS軌道標準化方法

低軌衛星軌道擬合及預報方法研究
負載敏感泵參數辨識與計算方法研究
IGBT和SiC MOSFET的驅動參數的計算方法







 工商網監
工商網監
評論