") 多模型自適應控制器的組成結構、系統(tǒng)設計與仿真研究
多模型自適應控制器的組成結構、系統(tǒng)設計與仿真研究

矢量控制理論流傳動的發(fā)展獲得了質(zhì)的飛躍,得到了與直流傳動系統(tǒng)同樣優(yōu)良的靜、動態(tài)性能。但是,矢量控制理論對電機參數(shù)的依賴性很大,而電機參數(shù)則具有一定的時變性。電機電阻存在的不確定性較大,達到標稱值的150%;同時,電機電感的不確定性變化較快。矢量控制對參數(shù)變化的敏感性使得實際系統(tǒng)難以保證完全解耦,實際控制效果難以達到理論分析的結果。
本文依據(jù)多模型自適應控制理論,根據(jù)被控對象存在的參數(shù)的不確定性,對被控對象電機系統(tǒng)建立了多個模型,并相應地設計了多個控制器,基于設定切換原則和與實際電機系統(tǒng)最為匹配的模型,這些控制器對被控對象電機系統(tǒng)實現(xiàn)了最佳調(diào)節(jié)。這樣就解決了常規(guī)自適應控制所無法解決的電機電阻存在的較大不確定性及電機電感的不確定性變化較快等難點問題。
多模型自適應控制概述
多模型自適應控制(Multiple Model Adaptive Control)于20世紀70年代研制成功,并在90年代再度成為自適應控制的一個研究熱點,這一研究實際上是對傳統(tǒng)的自適應控制方法的一種推廣。
1.1 多模型自適應控制系統(tǒng)的組成
多模型自適應控制器主要由模型集、控制器集、切換原則三部分組成。
1.2 模型集的建立
多模型自適應控制是用多個模型逼近系統(tǒng)的不確定性,并在多個模型的基礎上建立控制器進行控制的,因此模型集的建立、元素模型的多少將直接影響控制的精度和性能。本文采用動態(tài)優(yōu)化模型集法,利用自適應模型和固定模型共同組成模型集。
1.3 多模型自適應控制器的構成
多模型自適應控制器首先根據(jù)每個元素模型構成元素模型控制器,然后根據(jù)某一性能指標的切換函數(shù)將被控系統(tǒng)的控制器切換至使性能指標為最小的元素模型控制器上。
2 基于多模型自適應控制器的感應電機變頻調(diào)速系統(tǒng)
2.1 變頻調(diào)速系統(tǒng)的多模型描述
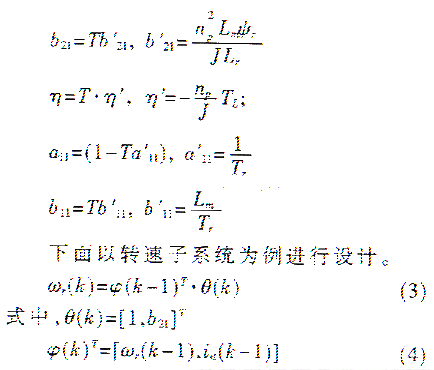
在轉子磁場定向的同步旋轉系M_T中,根據(jù)參考文獻[7],對感應電機變頻調(diào)速系統(tǒng)描述如下:
式中:
在變頻調(diào)速過程中,b12的變化區(qū)間為[b21,b21],將b21的攝動區(qū)間功分為12個區(qū)間,即將電機參數(shù)模型集Ω分成12個模型子集Ωi(i=1,2Λ12),并且這些模型子集滿足:
對固定模型建立如下指標切換函數(shù):

式中,α為遺忘因子,滿足0《α《1 i=1,2Λ12 在固定模型輸出參數(shù)的同時,兩個自適應模型也同步采用最小二乘法進行參數(shù)辨識,以得出電機系統(tǒng)的參數(shù):

對自適應模型建立如下指標切換函數(shù):

式中,L=1,2。在每個采樣周期,分別根據(jù)性能指標(5)和(7)求取最接近電機系統(tǒng)的模型參數(shù)和辨識參數(shù):

如果L(τ)≤i(τ),則表明此時模型集中有一個自適應模型與真實的電機模型最為匹配,選擇該模型參數(shù)作為當前時刻的對象模型參數(shù),即θ(k)=θ“L(k);并且如果此時L=2,則對第一個自適應模型重新設定初值,即θ1(k)=θ”2L(k)。反之,如果i(τ)≤L(τ),則表明此時模型集中的某個固定模型與真實的對象模型最為匹配,于是θ1(κ)=θi(κ),同時對第一自適應模型重新賦初值。
2.2 多模型自適應控制器的系統(tǒng)實現(xiàn)
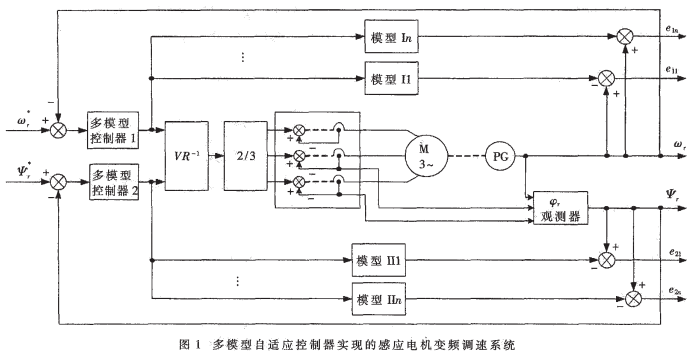
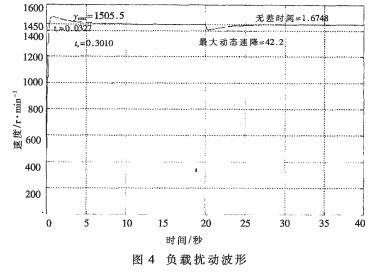
基于多模型自適應控制器實現(xiàn)的感應電機變頻調(diào)速系統(tǒng)如圖4所示。
2.3 仿真研究
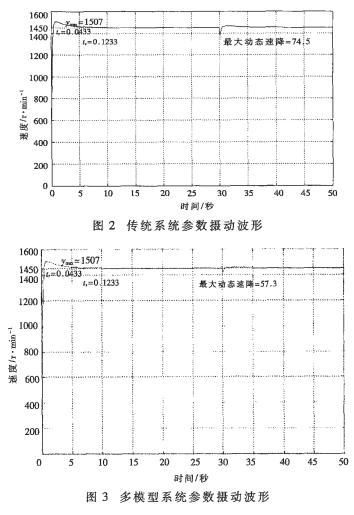
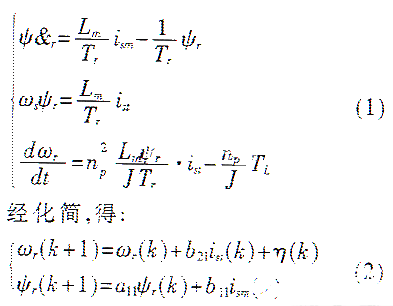
選用的電機參數(shù)如下:電機型號為JQ2-52-4,額定功率為10kW,額定電壓為380V,額定電流為19.8A,額定轉速為1450r/min,額定頻率為50Hz。Rs=1.33Ω,Lm=0.2865H,Lr=0.3005H,Rr=1.12Ω,Ls=0.2942H,J=0.0618kg%26;#183;m2。轉子電阻攝動40%時,由圖2可見,傳統(tǒng)矢量控制系統(tǒng)的最大動態(tài)速降為74.5r/min,相當于4.9%;由圖3可見,多模型控制系統(tǒng)的最大動態(tài)速降為57.3 r/min,相當于3.9%;由圖4可見,額定負載擾動時,多模型控制系統(tǒng)的最大動態(tài)速降為42.2 r/min,相當于2.9%。
仿真結果表明,多模型控制器實現(xiàn)的變頻調(diào)速系統(tǒng)比傳統(tǒng)矢量控制系統(tǒng)具有更為優(yōu)良的動、靜態(tài)性能。 采用自適應模型和固定模型共同組成的具有動態(tài)調(diào)整能力的動態(tài)優(yōu)化模型集,模型集每個時刻都在發(fā)生變化,以此逼近“真實“電機系統(tǒng)。基于固定模型設計的控制器保證了響應速度,而基于自適應模型設計的控制器保證了精度。
由于多模型自適應控制器實現(xiàn)的感應電機變頻調(diào)速系統(tǒng)離線地將電機參數(shù)存在的不確定性進行了分區(qū)處理,可解決常規(guī)自適應控制所無法解決的電機電阻存在的較大不確定性及電機電感的不確定性變化較快等難點問題。針對電機參數(shù)存在的不確定性,由多模型自適應控制器組成的感應電機變頻調(diào)速系統(tǒng)在不同的頻率區(qū)段采用不同的控制器。系統(tǒng)具有優(yōu)良的動靜態(tài)性能,為實現(xiàn)高性能變頻調(diào)速系統(tǒng)提供了一條新的思路。
責任編輯:gt
-
控制器
+關注
關注
114文章
17088瀏覽量
184056 -
電機
+關注
關注
143文章
9291瀏覽量
149309 -
仿真
+關注
關注
52文章
4269瀏覽量
135737
發(fā)布評論請先 登錄
無模型自適應控制在永磁同步電機轉速中的仿真研究
無刷直流電機模糊自適應PID的研究及仿真
無刷直流電機自適應模糊PID控制系統(tǒng)
[下載]交直流傳動系統(tǒng)的自適應控制
基于MATLAB的時變系統(tǒng)自適應控制的仿真
自適應跟蹤輸出控制器的設計和仿真
高級自適應PID控制器研究及應用
基于多模型自適應控制器的感應電機變頻調(diào)速系統(tǒng)
時變非線性系統(tǒng)的自適應逆控制仿真






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論