 電子發(fā)燒友App
電子發(fā)燒友App


什么是自適應(yīng)控制
自適應(yīng)控制
自適應(yīng)控制包括模型參考自適應(yīng)控制和自校正控制兩個分支。前者是20世紀(jì)50年代建立起來的,它是通過自適應(yīng)機構(gòu)來克服系統(tǒng)模型參數(shù)的不確定性;后者是瑞典學(xué)者Astrom1973年提出的,它是通過在線估計系統(tǒng)模型參數(shù),進而修改控制器的參數(shù),以使系統(tǒng)適應(yīng)環(huán)境的變化。到70年代末和80年代初,李推普諾夫穩(wěn)定性理論和軼收斂定理在自適應(yīng)控制中的成功應(yīng)用,使得基于穩(wěn)定性分析的模型參考自適應(yīng)控制系統(tǒng)的設(shè)計得到了蓬勃發(fā)展,形成模型參考自適應(yīng)控制的完整理論體系和設(shè)計方法;秋收斂定理由于在研究自校正控制系統(tǒng)的穩(wěn)定性有獨到之處,使得基于參數(shù)估計的自校正控制系統(tǒng)研究取得了突破性進展。
自適應(yīng)控制的概念
在反饋控制和最優(yōu)控制中,都假定被控對象或過程的數(shù)學(xué)模型是已知的,并且具有線性定常的特性。實際上在許多工程中,被控對象或過程的數(shù)學(xué)模型事先是難以確定的,即使在某一條件下被確定了的數(shù)學(xué)模型,在工況和條件改變了以后,其動態(tài)參數(shù)乃至于模型的結(jié)構(gòu)仍然經(jīng)常發(fā)生變化。 在發(fā)生這些問題時,常規(guī)控制器不可能得到很好的控制品質(zhì)。為此,需要設(shè)計一種特殊的控制系統(tǒng),它能夠自動地補償在模型階次、參數(shù)和輸入信號方面非預(yù)知的變化,這就是自適應(yīng)控制。
自適應(yīng)控制簡介
自適應(yīng)控制的研究對象是具有一定程度不確定性的系統(tǒng),這里所謂的“不確定性”是指描述被控對象及其環(huán)境的數(shù)學(xué)模型不是完全確定的,其中包含一些未知因素和隨機因素。
任何一個實際系統(tǒng)都具有不同程度的不確定性,這些不確定性有時表現(xiàn)在系統(tǒng)內(nèi)部,有時表現(xiàn)在系統(tǒng)的外部。從系統(tǒng)內(nèi)部來講,描述被控對象的數(shù)學(xué)模型的結(jié)構(gòu)和參數(shù),設(shè)計者事先并不一定能準(zhǔn)確知道。作為外部環(huán)境對系統(tǒng)的影響,可以等效地用許多擾動來表示。這些擾動通常是不可預(yù)測的。此外,還有一些測量時產(chǎn)生的不確定因素進入系統(tǒng)。面對這些客觀存在的各式各樣的不確定性,如何設(shè)計適當(dāng)?shù)目刂谱饔茫沟媚骋恢付ǖ男阅苤笜?biāo)達到并保持最優(yōu)或者近似最優(yōu),這就是自適應(yīng)控制所要研究解決的問題。
自適應(yīng)控制和常規(guī)的反饋控制和最優(yōu)控制一樣,也是一種基于數(shù)學(xué)模型的控制方法,所不同的只是自適應(yīng)控制所依據(jù)的關(guān)于模型和擾動的先驗知識比較少,需要在系統(tǒng)的運行過程中去不斷提取有關(guān)模型的信息,使模型逐步完善。具體地說,可以依據(jù)對象的輸入輸出數(shù)據(jù),不斷地辨識模型參數(shù),這個過程稱為系統(tǒng)的在線辯識。隨著生產(chǎn)過程的不斷進行,通過在線辯識,模型會變得越來越準(zhǔn)確,越來越接近于實際。
既然模型在不斷的改進,顯然,基于這種模型綜合出來的控制作用也將隨之不斷的改進。在這個意義下,控制系統(tǒng)具有一定的適應(yīng)能力。比如說,當(dāng)系統(tǒng)在設(shè)計階段,由于對象特性的初始信息比較缺乏,系統(tǒng)在剛開始投入運行時可能性能不理想,但是只要經(jīng)過一段時間的運行,通過在線辯識和控制以后,控制系統(tǒng)逐漸適應(yīng),最終將自身調(diào)整到一個滿意的工作狀態(tài)。再比如某些控制對象,其特性可能在運行過程中要發(fā)生較大的變化,但通過在線辯識和改變控制器參數(shù),系統(tǒng)也能逐漸適應(yīng)。
常規(guī)的反饋控制系統(tǒng)對于系統(tǒng)內(nèi)部特性的變化和外部擾動的影響都具有一定的抑制能力,但是由于控制器參數(shù)是固定的,所以當(dāng)系統(tǒng)內(nèi)部特性變化或者外部擾動的變化幅度很大時,系統(tǒng)的性能常常會大幅度下降,甚至是不穩(wěn)定。所以對那些對象特性或擾動特性變化范圍很大,同時又要求經(jīng)常保持高性能指標(biāo)的一類系統(tǒng),采取自適應(yīng)控制是合適的。但是同時也應(yīng)當(dāng)指出,自適應(yīng)控制比常規(guī)反饋控制要復(fù)雜的多,成本也高的多,因此只是在用常規(guī)反饋達不到所期望的性能時,才會考慮采用。
自適應(yīng)控制基本原理
一、控制過程

1、信息采集
獲取被控系統(tǒng)(或可調(diào)系統(tǒng)) 的輸入輸出及相關(guān)狀態(tài)信息等。
2、在線辨識或性能計算
對系統(tǒng)相關(guān)參數(shù)或狀態(tài)進行連續(xù)或周期性估計(辨識);對系統(tǒng)的性能指標(biāo)進行計算。
3、控制決策
根據(jù)辨識結(jié)果與指標(biāo)要求,確定當(dāng)前控制(調(diào)整)策略,通過與給定性能指標(biāo)比較,確定相應(yīng)的控制決策。
4、修正實現(xiàn)
通過修正裝置對被控系統(tǒng)的控制器(或可調(diào)系統(tǒng))的相關(guān)參叛或狀太進行修正或調(diào) 節(jié)。
二、關(guān)于在線辨識與性能計算
1)并非所有的自適應(yīng)控制系統(tǒng)都要求直接辨識被控對象的特性或參數(shù),對某些自適應(yīng)控制系統(tǒng),只要測量與計算出性能指標(biāo)的數(shù)值,就可以確定控制策略應(yīng)如何修正。
2)通常,自適應(yīng)控制系統(tǒng)需要選擇一個合適的系統(tǒng)性能指標(biāo),并將該性能指標(biāo)的優(yōu)劣與修正機構(gòu)對應(yīng)的修正信號聯(lián)系起來,而與性能指標(biāo)極值點對應(yīng)的修正信號變化規(guī)律即為自適應(yīng)規(guī)律。
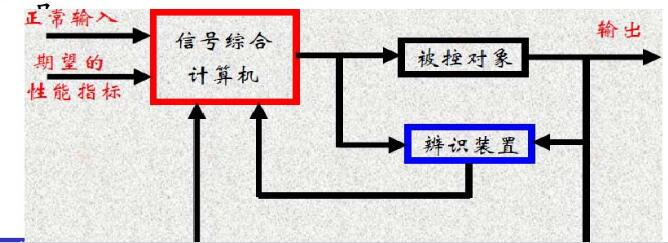
三、參數(shù)修正法
直接調(diào)整被控系統(tǒng)的相關(guān)參數(shù);通過修正控制器或補償網(wǎng)絡(luò)的參數(shù)到達調(diào)整可調(diào)系統(tǒng)參數(shù)的目的。
信號綜合法根據(jù)性能指標(biāo)要求,綜合出加到對象上去的控制信。
自適應(yīng)控制系統(tǒng)的原理
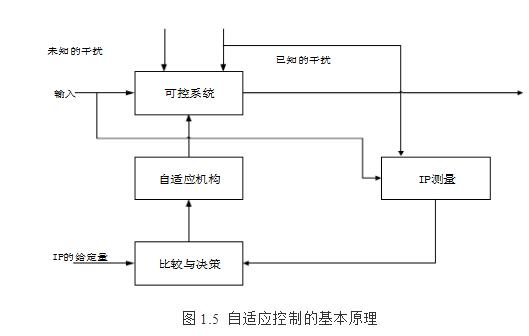
自適應(yīng)控制系統(tǒng)需要不斷的測量本身的狀態(tài)、性能、參數(shù),對系統(tǒng)當(dāng)前數(shù)據(jù)和期望數(shù)據(jù)進行比較,再做出最優(yōu)的改變控制器結(jié)構(gòu)、參數(shù)或控制方法等決策。系統(tǒng)不斷地測量輸入和擾動對比IP 的參考輸入,根據(jù)需要不斷的調(diào)節(jié)自適應(yīng)機構(gòu),保證系統(tǒng)輸出滿足要求,還要保證系統(tǒng)的穩(wěn)定。自適應(yīng)控制基本原理圖如圖1.5所示。
自適應(yīng)控制的主要理論問題
目前,自適應(yīng)控制理論研究還存在如下問題:
1、穩(wěn)定性
穩(wěn)定性是一個控制系統(tǒng)最核心的要求,也是設(shè)計控制系統(tǒng)的核心問題。任何設(shè)計的 自適應(yīng)控制系統(tǒng)都應(yīng)該保證全局穩(wěn)定,目前常常借助于 Liapunov 穩(wěn)定性理論和波波夫 超穩(wěn)定理論設(shè)計自適應(yīng)系統(tǒng)。這種方法對于時不變線性系統(tǒng)的設(shè)計是比較成熟的,但對 于非線性或隨機系統(tǒng)的研究正在緩慢進行。隨著 MRAC 的發(fā)展,各種各樣的自適應(yīng)系 統(tǒng)將誕生,全局穩(wěn)定將更難保證。
2、收斂性
由于自適應(yīng)算法的非線性特性給建立收斂理論帶來困難,目前只有有限的幾類自適應(yīng)算法,在穩(wěn)定性的證明上比較成熟。一些簡單的自適應(yīng)系統(tǒng)可以應(yīng)用 Liapunov穩(wěn)定性理論來判斷。現(xiàn)有的收斂性結(jié)果的局限性太大,假定條件過于苛刻,不便于實際應(yīng)用。收斂性理論問題還有待進一步深入。
3、性能指標(biāo)
由于系統(tǒng)的非線性,時變及初始條件的不確定等原因,分析自適應(yīng)系統(tǒng)的動態(tài)品質(zhì) 是很困難的,目前這方面的成果有限。
自適應(yīng)控制的發(fā)展概況
自適應(yīng)控制系統(tǒng)首先是由Draper和Li在1951年提出的,他們介紹了一種能使性能特性不確定的內(nèi)燃機達到最佳性能的控制系統(tǒng),這種類型的控制能力能自動的達到最優(yōu)的操作點,所以叫做最優(yōu)控制或極值控制。而自適應(yīng)這一專業(yè)名詞是1954年由Tsien在《工程控制論》一書中提出的。其后,在1955年Benner和Drenick也提出一個控制系統(tǒng)具有“自適應(yīng)”的概念。自適應(yīng)控制發(fā)展的重要標(biāo)志是在1958年Whitaker及同事設(shè)計的一種自適應(yīng)飛機控制系統(tǒng)。
1960年Li和Van Der Velde提出的自適應(yīng)控制系統(tǒng),它的控制回路中用一個極限環(huán)使參數(shù)不確定性得到自動補償,這樣的系統(tǒng)稱為自振蕩的自適應(yīng)系統(tǒng)。 Petror等人在1963年介紹一種自適應(yīng)系統(tǒng),它的控制輸入由開關(guān)函數(shù)或繼電器產(chǎn)生,并以與參數(shù)值有關(guān)的系統(tǒng)軌線不變性原理為基礎(chǔ)來設(shè)計系統(tǒng)。這種系統(tǒng)稱為變結(jié)構(gòu)系統(tǒng)。 而幾年來許多學(xué)者在自適應(yīng)控制系統(tǒng)的穩(wěn)定性、收斂性和設(shè)計方法上做了大量的有益工作,其中有美國的Narendar,Morse和澳大利亞的Goodwin。我國學(xué)者陳翰馥在收斂性分析方面也作出很大貢獻。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論