") 利用CANopen協(xié)議實現(xiàn)伺服電機的網(wǎng)絡(luò)化控制系統(tǒng)設(shè)計
利用CANopen協(xié)議實現(xiàn)伺服電機的網(wǎng)絡(luò)化控制系統(tǒng)設(shè)計

基于現(xiàn)場總線的網(wǎng)絡(luò)技術(shù)的研究是自動化領(lǐng)域發(fā)展的一個熱點,CANopen協(xié)議是目前流行于歐洲的基于CAN總線應(yīng)用層的標準協(xié)議,對工程設(shè)計者來說,研究現(xiàn)場總線的核心任務(wù)就是對控制節(jié)點進行開發(fā),本文就是通過實現(xiàn)伺服電機控制模塊的CANopen為協(xié)議,說明一個基于CANopen協(xié)議的控制網(wǎng)絡(luò)的組態(tài)。
伺服電機控制器在自動控制領(lǐng)域里有著廣泛的應(yīng)用,如紡織機械和印刷機等,為了得到理想的速控效果,伺服電機模塊除了要在分辨率、線性程度以及轉(zhuǎn)換速率上達到一定的要求外,還應(yīng)具有良好的在線可控性和實時在線狀態(tài)檢測功能,為此,利用CAN總線高層通信協(xié)議CANopen,結(jié)合陜西省教育廳“并條機自調(diào)勻整”項目對伺服電機控制模塊參數(shù)的要求,開發(fā)了一個具有硬件可重用性、軟件可重配置特點的伺服電機控制模塊。
1、 CANopen協(xié)議概述
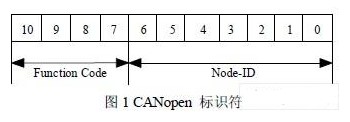
CANopen協(xié)議是由CiA協(xié)會針對CAN協(xié)議的不完整性而定義出的一個更高層次的協(xié)議——應(yīng)用層協(xié)議。一個CANopen設(shè)備模塊可分為3部分,如圖1所示,通信接口和協(xié)議軟件用于提供在總線上收發(fā)通信對象的服務(wù),不同CANopen設(shè)備間的通信是通過交換通信對象來完成的。這一部分直接面向CAN控制器進行操作,對象字典描述了設(shè)備使用的所有數(shù)據(jù)類型、通信對象和應(yīng)用對象,對象字典位于通信程序和應(yīng)用程序之間,用于向應(yīng)用程序提供接口,應(yīng)用程序?qū)ο笞值溥M行操作,即可實現(xiàn)CANopen通信。它包括功能部分和通信部分,通信部分通過對對象字典進行操作實現(xiàn)CANopen通信,而功能部分則根據(jù)應(yīng)用要求來實現(xiàn)。

在CANopen網(wǎng)絡(luò)系統(tǒng)中每個節(jié)點都有唯一的一個對象字典,而且每個節(jié)點的對象字典都具有相同的結(jié)構(gòu),但具體的內(nèi)容要根據(jù)不同的設(shè)備而定,包含了描述該設(shè)備及其網(wǎng)絡(luò)行為的所有參數(shù),CANopen協(xié)議還定義了4種報文(通信對象),用于對不同作用的信息進行處理,分別為管理報文(NMT)、服務(wù)數(shù)據(jù)對象(SDO),過程數(shù)據(jù)對象(PDO)和預(yù)定義報文或特殊功能對象。具體的CANopen協(xié)議內(nèi)容可參考相關(guān)文檔。
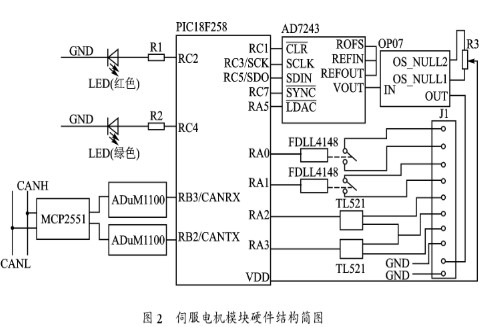
2、 伺服電機模塊的硬件實現(xiàn)
伺服電機模塊應(yīng)用Microchip公司生產(chǎn)的帶有CAN總線功能模塊的主頻為40M赫茲的PIC18F258單片機進行控制。根據(jù)并條機自調(diào)勻整系統(tǒng)對伺服電機的要求(9V-3000r/min,即3mV-1r/min),以及從總線上以1ms為周期發(fā)送來的D/A轉(zhuǎn)速控制數(shù)據(jù),使用ADI公司的12位AD7243芯片進行D/A轉(zhuǎn)換,它具有300K赫茲轉(zhuǎn)換速率,3種可選擇的輸出電壓,分別是0~+10V、0~+5V和-5~+5V,采用串行端口通信。
圖2為硬件電路簡圖,根據(jù)系統(tǒng)需求,設(shè)置AD7243電壓輸出為±5V,將AD7243芯片的ROFS引腳與REFIN引腳相連實現(xiàn),在AD7243的輸出端接有OP07運算放大器,用于調(diào)整輸出電壓到±10V,以控制電機正反方向和調(diào)節(jié)轉(zhuǎn)速,圖中繼電器FDLL4148用于控制電機的啟動和停止,光耦TL521用于對伺服電機狀態(tài)采集時的隔離器,為實時了解伺服電機運行狀態(tài),根據(jù)CANopen協(xié)議分別設(shè)計了用于指示系統(tǒng)當前狀態(tài)和錯誤的LED(綠色和紅色)指示燈。J1為與伺服控制器的接口插件。
圖2中,在OP07上接有調(diào)節(jié)零輸出偏置電壓的可調(diào)電位器R3;用ADuM1100高速數(shù)字隔離器代替?zhèn)鹘y(tǒng)的光電耦合器,以降低功耗,提供精確的信號,MCP2551是一種可容錯的高速CAN收發(fā)器,具有差分發(fā)射和接收能力,可將許多節(jié)點與同一網(wǎng)絡(luò)相連接并采用非屏蔽線部署網(wǎng)絡(luò),從而降低系統(tǒng)成本。
3 、伺服電機模塊的CANopen協(xié)議實現(xiàn)
(1)CANopen協(xié)議實現(xiàn)
伺服電機模塊在CANopen網(wǎng)絡(luò)中作為從節(jié)點發(fā)揮作用,完成屬于自己范圍內(nèi)的特定任務(wù),進行實時數(shù)據(jù)傳輸,并對其負責(zé)的底層設(shè)備進行數(shù)據(jù)采集和控制,在實現(xiàn)CANopen協(xié)議之前,必須先了解它在網(wǎng)絡(luò)中的具體功能:通過CAN總線接收控制伺服電機的數(shù)據(jù)(包括轉(zhuǎn)速控制、啟動和停止),采樣伺服Ready信號和電機當前狀態(tài)回送到CAN總線。
CANopen協(xié)議的核心內(nèi)容是對象字典,完成各種機器CANopen協(xié)議通信的實質(zhì)是在對象字典的基礎(chǔ)上進行操作,通過映射的關(guān)系實現(xiàn)對各種報文數(shù)據(jù)的處理,根據(jù)伺服電機模塊的功能并結(jié)合CANopen協(xié)議各類報文的特征,定義了如表1和表2所列的屬性。
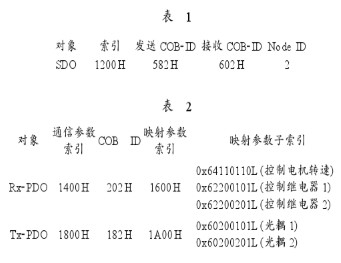
表1和表2定義的SDO報文和PDO報文分別用于讀/寫對象字典和傳送實時數(shù)據(jù),PDO報文映射參數(shù)子索引的內(nèi)容代表PDO報文中各字節(jié)的用途,比如:RxPDO報文映射參數(shù)子索引0x64110110L指對象字典索引0x6411和子索引0x01,占16位的數(shù)據(jù)內(nèi)容,即控制電機轉(zhuǎn)速數(shù)據(jù),此外,系統(tǒng)還定義了一個接收NMT報文,用于實現(xiàn)主節(jié)點對從結(jié)點的組態(tài);一個 Heartbeat(心跳)報文,以5000ms為周期發(fā)送,使主節(jié)點實時監(jiān)測從節(jié)點狀態(tài)并在發(fā)生錯誤時及時進行處理。
除了上述用于實現(xiàn)伺服電機模塊預(yù)定義功能的報文外,還根據(jù)CANopen協(xié)議的指示燈規(guī)范設(shè)計了狀態(tài)(綠色)和錯誤(紅色)指示燈,通過定時器周期性地檢查CAN總線狀態(tài)寄存器和CANopen通信狀態(tài)標志,設(shè)置指示燈的常亮、閃亮和閃爍等狀態(tài),可使用戶直觀地判斷當前機器所處的狀態(tài),從而提高工作效率,具體的CANopen協(xié)議和指示燈規(guī)范可以參考相關(guān)文檔。
伺服電機控制模塊的設(shè)計是基于CANopen協(xié)議對象字典的模塊化設(shè)計,它可以方便地進行功能擴展,只須修改對象字典中報文映射參數(shù),添加相應(yīng)的功能模塊即可實現(xiàn)。與以往的基于CAN數(shù)據(jù)傳送協(xié)議相比,大大提出了系統(tǒng)效率,節(jié)約了有限的硬件資源,為功能的擴展和用途的延伸提供了方便。
(2)應(yīng)用程序流程
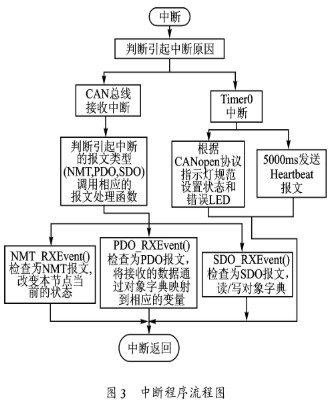
伺服電機模塊上電以后,根據(jù)CANopen協(xié)議從節(jié)點的性質(zhì),系統(tǒng)在進行完初始化參數(shù)配置后,發(fā)送Boot-up報文通知主節(jié)點已進入預(yù)操作(preoperational)狀態(tài),并在主循環(huán)中等待各種類型中斷的到來,在預(yù)操作狀態(tài)中,可接收主節(jié)點的SDO報文讀/寫對象字典。比如當無法使DA零點輸出偏置電壓達到標準值時,可以通過修改對象字典的電壓偏置值相來進行調(diào)整。NMT報文也可在預(yù)操作狀態(tài)中接收,用于改變節(jié)點狀態(tài),進入伺服電機模塊實時傳輸PDO報文的操作(operational)狀態(tài),開始系統(tǒng)的正常工作,一旦系統(tǒng)進入預(yù)操作狀態(tài),就會以5000ms為周期發(fā)送Heartbeat報文使主節(jié)點實時監(jiān)控伺服電機模塊的狀態(tài),當從節(jié)點發(fā)生錯誤時主節(jié)點就可以立刻采取措施,實現(xiàn)實時在線監(jiān)控的功能,圖3為中斷程序流程圖。
(3)基于PIC18F258微控制器的郵箱動態(tài)分配的實現(xiàn)
郵箱動態(tài)分配的任務(wù)是在不固定某個郵箱具體特性的同時,實現(xiàn)對郵箱中報文作用的判斷,通過郵箱的動態(tài)分配,可以節(jié)約系統(tǒng)資源,提高軟件靈活性,便于今后系統(tǒng)擴展。
在系統(tǒng)初始化過程中,實現(xiàn)了郵箱的動態(tài)分配,具體方法是:PIC18F258微控制器具有2個接收緩沖器和6個接收濾波器,其中:接收緩沖器0對應(yīng)于接收濾波器0和1;接收緩沖器1對應(yīng)于接收濾波器2、3、4和5。通過定義常數(shù)標志數(shù)組_uCANRxHndls[ i](0≤i≤5),依次將要接收的報文COB-ID定義到接收濾波器中,當產(chǎn)生CAN總線接收中斷時,根據(jù)中斷標志寄存器PIR3的Bit0(RXB0IF,接收緩沖器0中斷標志位)和Bit1(RXB1IF,接收緩沖器1中斷標志位)來判斷產(chǎn)生中斷的接收緩沖器。
當接收緩沖器0中斷時,則有:
_uCAN_ret=*(_uCANRxHndls+(RXB0CON&0x01)) (1)
其中:_uCAN_ret為標識某報文接收中斷數(shù)組常數(shù)標志;接收緩沖器0控制寄存器(RXB0CON)的Bit0為接收濾波器0、1的選擇位。
接收緩沖器1中斷時,則有:
_uCAN_ret=*(_CANRxHndls+(RXB1CON&0x07)) (2)
其中:接收緩沖器1控制寄存器(RXB1CON)的Bit2-Bit0為接收濾波器2、3、4和5的選擇位。
通過式(1)和式(2)可得代表某種報文中斷的數(shù)組常數(shù)標志,實現(xiàn)對接收報文類型的判斷,完成郵箱動態(tài)分配和相應(yīng)報文處理。
4 、實驗驗證
為方便實現(xiàn)實驗室監(jiān)測,直觀地觀察伺服電機模塊的工作狀態(tài),判斷D/A轉(zhuǎn)化的線性特征,使用LabView軟件設(shè)計了PC監(jiān)控面板,如圖4所示。
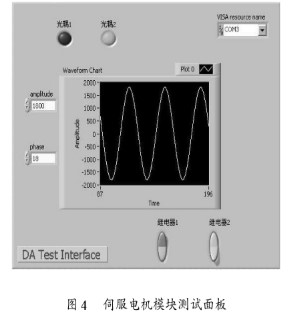
圖4中的amplitude和phase分別用于設(shè)置發(fā)送正弦波的幅度和相位,正弦波數(shù)據(jù)以占用兩字節(jié)的形式發(fā)送,結(jié)合繼電器1和2占用的一個字節(jié)組成3字節(jié)的TPDO報文,光耦1、2表示從RPDO報文接收到的數(shù)據(jù)狀態(tài),在此監(jiān)控面板的基礎(chǔ)上,使系統(tǒng)的調(diào)試更加方便。
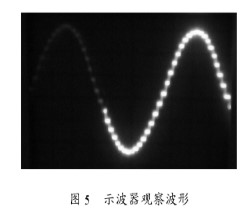
在示波器上觀察到的D/A輸出波形如圖5所示,因為D/A輸出為瞬間波形,所以在示波器上看到的波形光線只有一部分。此外,由于LabView軟件的限制,最高輸出數(shù)據(jù)周期只能達到1ms,因此,在示波器上看到的波形有折線存在,每個轉(zhuǎn)折點代表一個輸出點,通過設(shè)置相位值來決定轉(zhuǎn)折點的個數(shù),即輸出多少個數(shù)據(jù)來表示一個波形,例如圖5中的相位為18,則會輸出36個點來表示一個周期波形。將此D/A輸出至伺服控制器即可實現(xiàn)對伺服電機的控制,這一點已在現(xiàn)場試驗中得到驗證。
5、結(jié)論
通過對并條機自調(diào)勻整系統(tǒng)的其他控制節(jié)點采用相同的方法進行CANopen協(xié)議開發(fā),實現(xiàn)了網(wǎng)絡(luò)化的控制系統(tǒng)。除了伺服電機外一個完整的控制系統(tǒng)還應(yīng)有:主控模塊如(DSP或單片機)、PLC模塊和鍵盤顯示模塊等。和伺服電機模塊一樣,可將每個控制模塊都作為一個節(jié)點進行開發(fā)。每個節(jié)點都有各自的節(jié)點ID,所接收和發(fā)射的數(shù)據(jù)在總線上進行交流,通過改變伺服電機控制的低速羅拉轉(zhuǎn)速來調(diào)節(jié)牽伸倍數(shù),從而達到自調(diào)勻整的目的。
自動控制系統(tǒng)的網(wǎng)絡(luò)化,標準化是現(xiàn)代工業(yè)發(fā)展的一個必然趨勢,將CAN總線應(yīng)用層協(xié)議CANopen應(yīng)用于該領(lǐng)域有著廣闊的應(yīng)用前景,本文通過將伺服電機控制模塊做成符合CANopen協(xié)議的標準化裝置,并應(yīng)用于并條機自調(diào)勻整系統(tǒng)中,使其具有了即插即用和在線監(jiān)控特性,增強了設(shè)備的可擴展性,提高了數(shù)據(jù)傳輸?shù)目煽啃浴_@種基于現(xiàn)場總線應(yīng)用層標準的協(xié)議的開發(fā)和使用,對提高系統(tǒng)的工作效率,特別是對復(fù)雜系統(tǒng)的研制具有一定的指導(dǎo)意義。
-
控制器
+關(guān)注
關(guān)注
114文章
17097瀏覽量
184175 -
總線
+關(guān)注
關(guān)注
10文章
2959瀏覽量
89728 -
伺服電機
+關(guān)注
關(guān)注
88文章
2116瀏覽量
59633
發(fā)布評論請先 登錄
通過CANopen轉(zhuǎn)Modbus TCP網(wǎng)關(guān)的伺服系統(tǒng)
Profinet協(xié)議轉(zhuǎn)換為CanOpen協(xié)議來連接CanOpen伺服驅(qū)動器的應(yīng)用
網(wǎng)絡(luò)化多電機伺服系統(tǒng)監(jiān)控終端設(shè)計
基于CAN總線的網(wǎng)絡(luò)化PLC技術(shù)研究與實現(xiàn)-碩士學(xué)位論文
【FPGA參賽作品】基于FPGA的網(wǎng)絡(luò)化電機傳動控制系統(tǒng)
針對電機控制最新網(wǎng)絡(luò)化解決方案
網(wǎng)絡(luò)化測控系統(tǒng)的特點和實現(xiàn)
網(wǎng)絡(luò)化控制系統(tǒng)中的多包傳輸
一類網(wǎng)絡(luò)化串級控制系統(tǒng)的分析與建模
基于調(diào)度的網(wǎng)絡(luò)化控制系統(tǒng)
基于單片機的網(wǎng)絡(luò)化路燈控制系統(tǒng)設(shè)計

基于DSP的CANopen通訊協(xié)議的解析

基于CANoen協(xié)議實現(xiàn)DSP系統(tǒng)與上位機CAN的通訊





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論