 驅動器領域技術上的一個重點和難點
驅動器領域技術上的一個重點和難點

馬達驅動電流環的設計,作為驅動器領域技術上的一個重點和難點一直困擾著很多工程師,今天讓我們一起來揭開他的面紗。
對于一個馬達來說,如果電流變大的話,可能造成的危害有兩個:
1.電機本體本身會發熱,會損壞;
2.我們驅動器的MOSFET會由于電流過大導致發熱,甚至損壞。另外,我們這套系統使用電源或者電池供電的,電流變大的話,也就是功率變大了,這個時候提供能量的電源或者電池就會出現問題,或者出現異常保護。
因此,為了我們這樣一個系統能夠穩定的工作,我們就需要對電機的電流進行監控。
一般的,監控電流之后的保護措施有兩種:
1.當檢測到電流過大之后,我們就實行一個關斷保護;
2.有的情況下,我們是不能關斷保護的,比如說無人機,由于某種原因導致過流了,過流了之后如果進行關斷的話,它就會摔下來,因此這個時候是不能進行關斷的, 還要繼續保持一定功率去工作。當然也不能過大功率去工作,這個時候就需要我們對它進行一個限功率輸出,也叫恒功率輸出。
那么恒功率的目的,也就是恒電流輸出,也就是我們所說的“電流環”。對于一個電機來說,實際上它的“環”是有很多的,比如說有:電壓環、轉速環、位置環、電流環。我們這次和大家談的主要是電流環,那么談這個電流環的話,首先我們要和大家談的是電機的電流如何進行一個采樣。
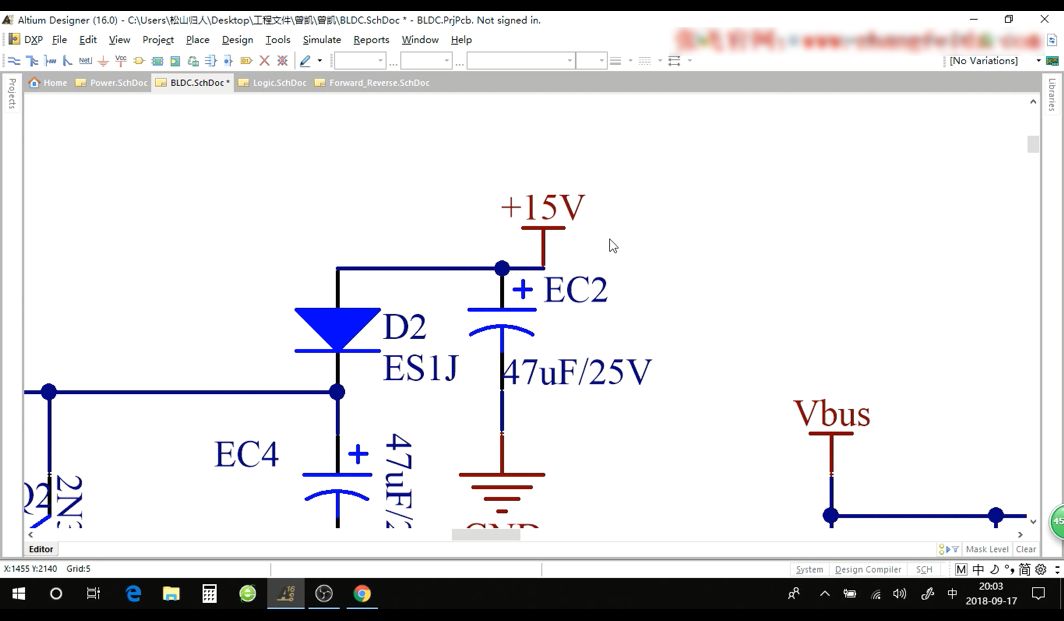
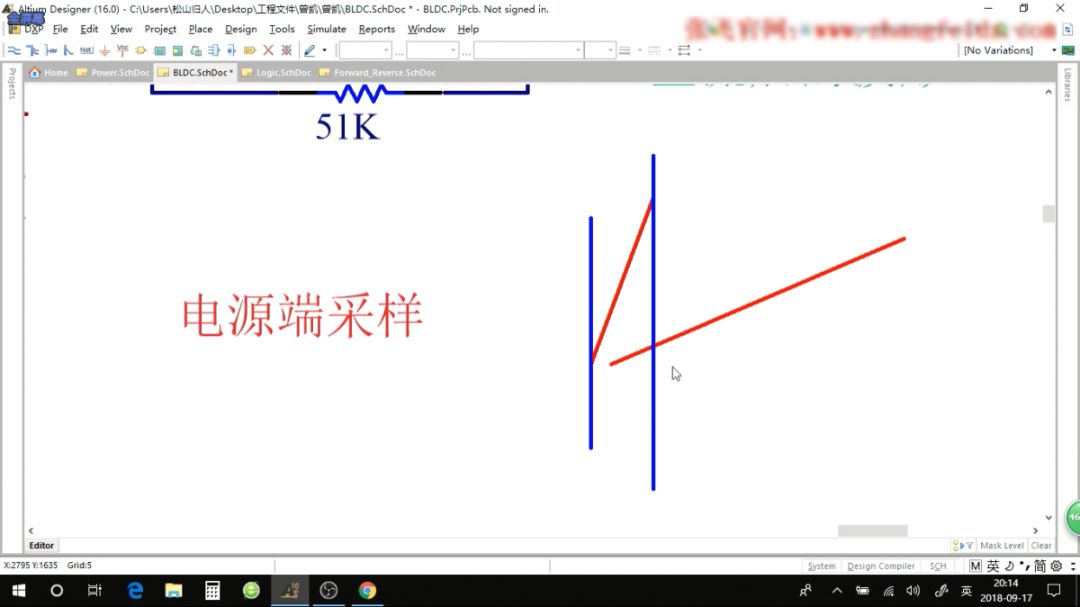
電機電流的采樣一般我們分兩種形式:一種方式是我們直接從電源端采樣,對于電源端采樣,比如說像這個橋式電路,+15V是給電池供電的電壓,我們把這樣的一個電壓叫做Vbus電壓(如下圖)。
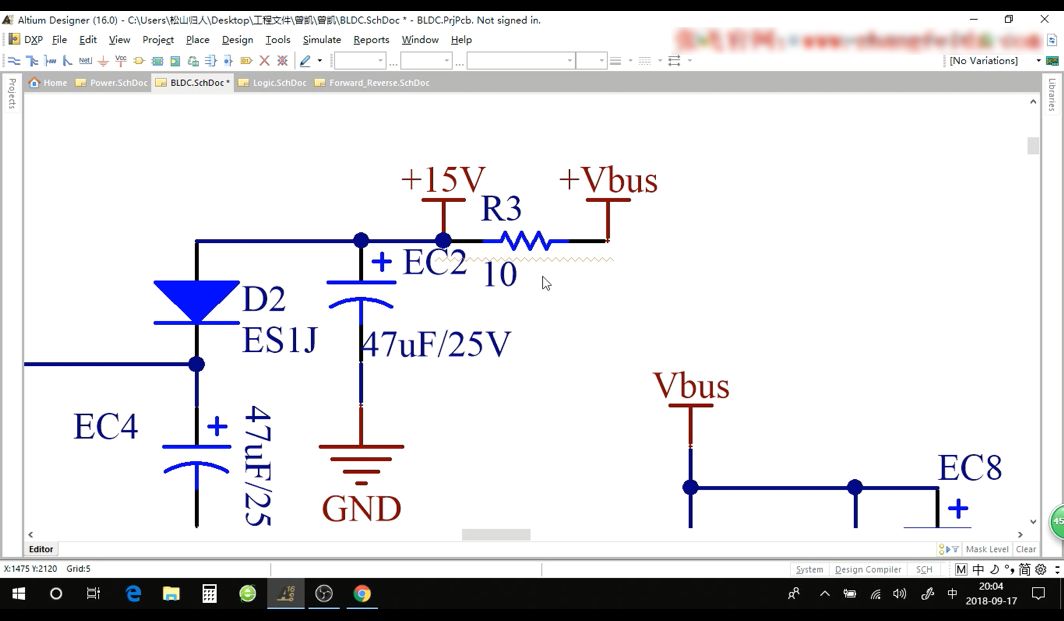
這個Vbus電壓實際上是由電源供過來的,我們可以在這個電壓前面,我們串接一個很小的電阻,當然了,這個電路的網絡就需要改動一下(如下圖),而且R3如果做采樣電阻的話,所以說它的電阻的就不能大,大的話,它會影響功率的輸出,比如說我們可以用一個10Ω這樣的電阻。當它流過電流之后,由于它有阻值,那么它兩端就有一個電勢差,我們測量這個電勢差,然后它的電流等效成電勢差除以一個10Ω的阻值,而R3兩端的電壓我們就可以通過一個運放進行采集。這種方式輸出來的話,采集的是一個平均電流。
如果Vbus電壓是高壓的話,比如說幾十伏以上。而我們的運放,它的輸入
電壓是不可能很高的,這樣的話,運放就不能直接進行采集,就需要進行分壓,或者進行一個隔離,比如說用一個高速光耦進行隔離,再進行采樣,這樣的話,也是一個比較不錯的方法,但是它的成本會比較高。
我們還有一個方法:由于R3是放在Vbus端,它是屬于電源端,它的電壓比較高的話,運放它的成本就比較高,這樣我們可以把檢流電阻放在地端(如下圖)。放在地端的話,它過來的就是一個低的電壓。低的電壓對于一個正常的運放來說,是在它的電氣參數范圍之內的,所以說這樣就沒有什么問題了。因此,通過一個這樣的方式,我們可以進行一個采樣。
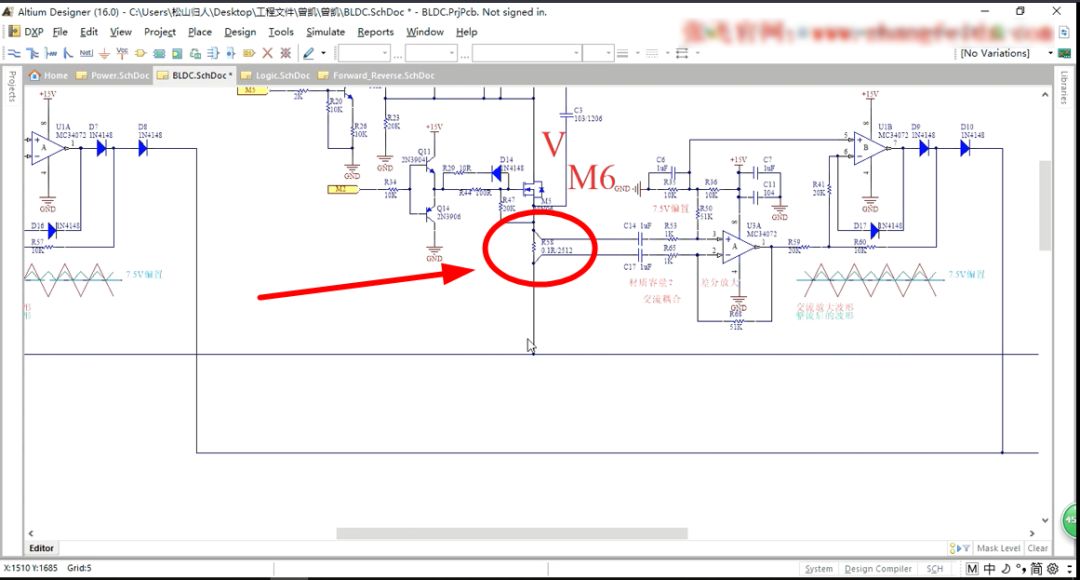
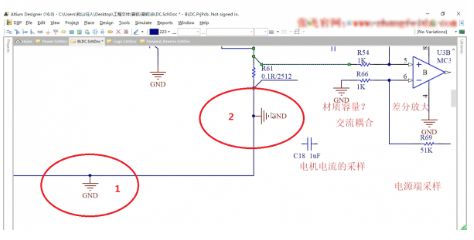
理想情況下,我們是進行差分輸入的,運放的兩端一定要緊挨著這個檢流電阻。而不能把這個地方直接接到地上,甚至在layout的時候把這個“地”接到其他地方去了,這樣的話就會把干擾采集進來(如下圖)。
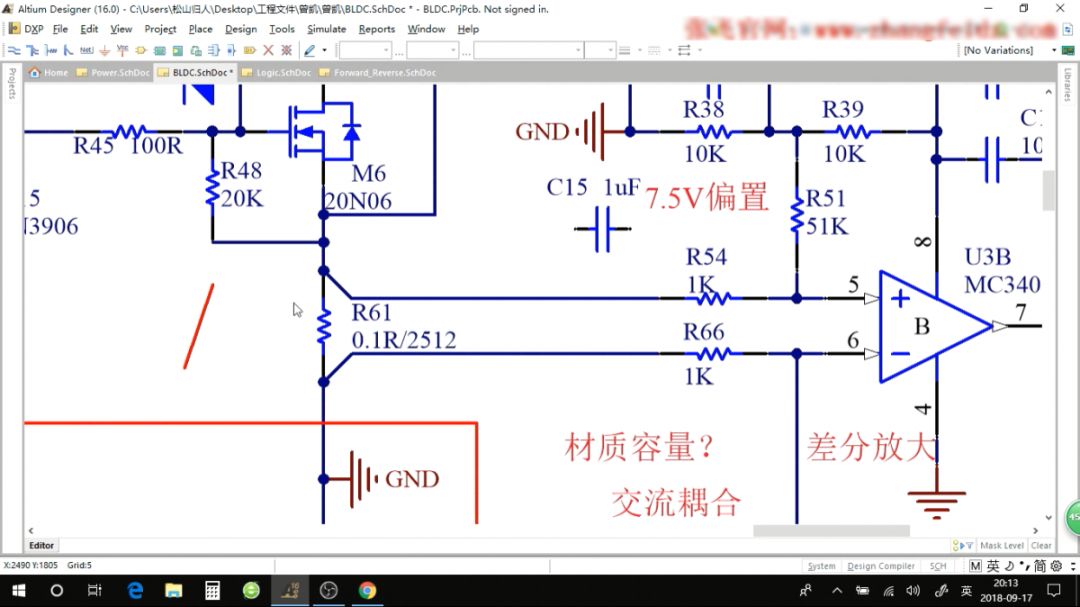
因為在布局的時候,“1”點的地和“2”點的地其實是不同的(如下圖)。理論上這兩點的電位是相同的,但事實上,它是不相同的。原因很簡單,這個電路是接馬達的相線的,電流會很大,這樣的一個大電流下來的話,在到達這個地上之后,這個地上必然會發生震蕩。為什么有了大電流之后,“1”點和“2”點之間的地會不一致呢?我們可以設想一下,假設這是一個廣大的湖面,在湖面很平靜的情況下,這兩點的水位是一樣高的,我們在“2”點扔一個石頭的話,這樣的話,水面的就會產生漣漪,由于水面在高、低不斷地晃動,那么這兩點就不是同樣的水位了。所以,我們需要在靠近檢流電阻的地方進行采集,這樣的話,即使存在高低波動的話,檢流電阻的兩端會同時變高或變地,但是檢流電阻兩端的電壓差是不變的,這樣的話,就由通過的電流決定了。當然,由于M6是高速開關的,所以R61需要是低ESL的電阻,一般是貼片電阻,一定要是低ESL的,如果感量太大的話,由于di/dt比較大,那么就會產生感抗,R61兩端電壓量出來就會比較高,但是事實上電壓是沒有那么高的,所以說這個地方對電阻的選型是有要求的。
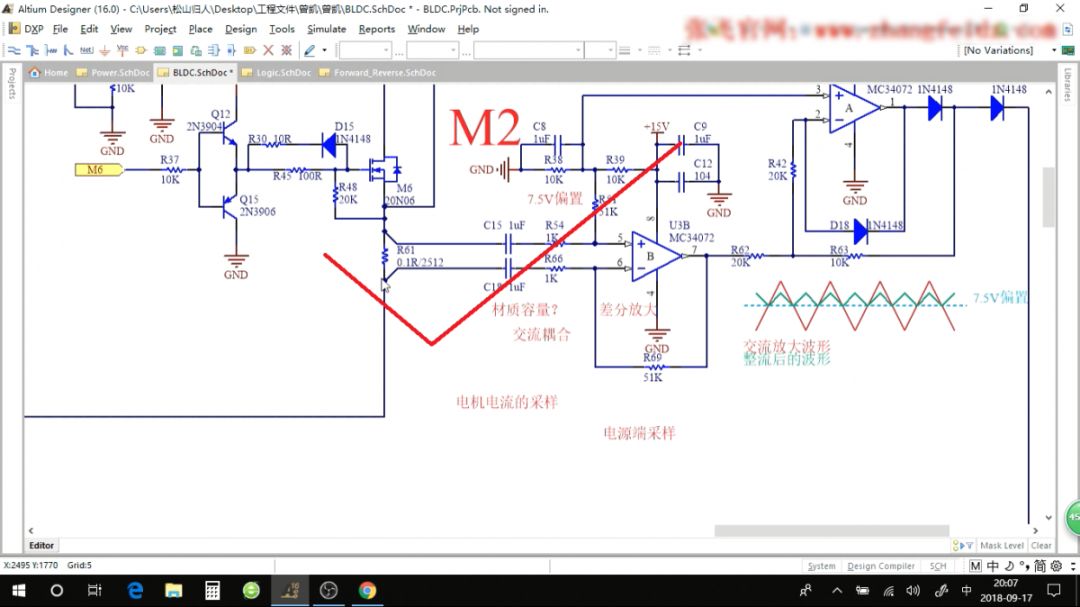
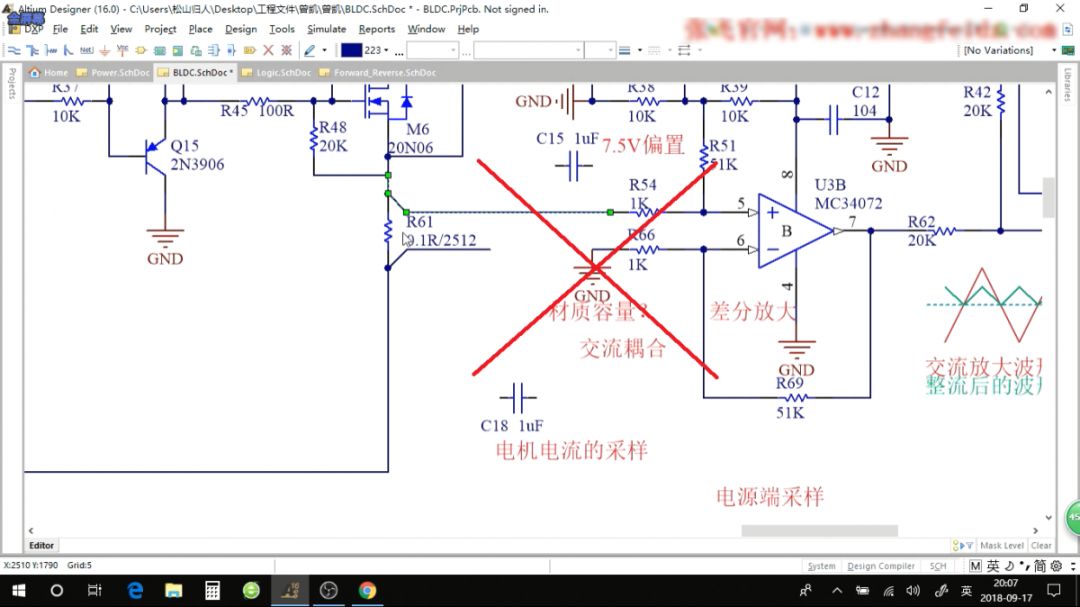
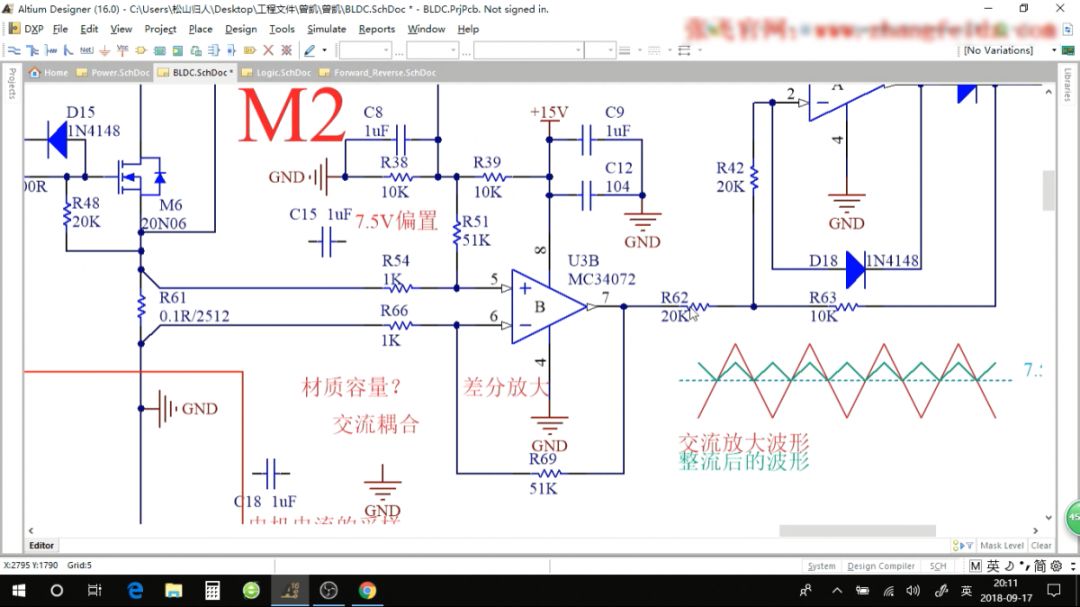
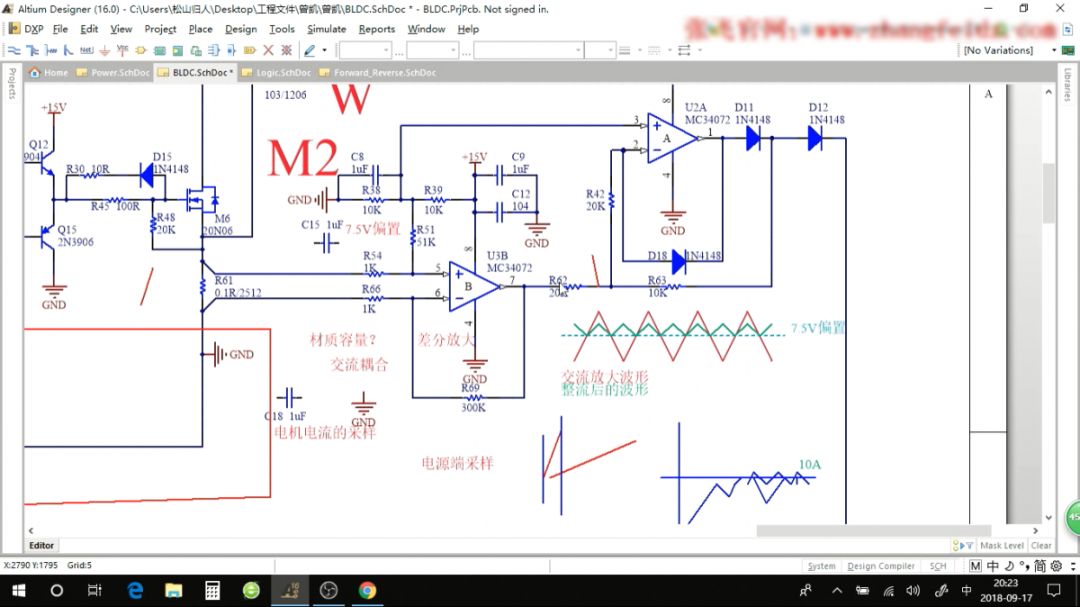
如下圖,R61采集過來的電壓需要進行放大,為什么需要進行放大呢?首先,第一,這個檢流電阻的阻值不能太大,如果阻值太大的話,假設有30A的電流流過,如果電阻為1Ω,那么電阻的功率為:30*30*1=90W,一般沒有這樣的電阻,即使有,成本也很貴。
所以說這個地方需要選擇小電阻,當然了,這個地方需要根據電機和電流來進行選擇。最好這個電阻的功率是正常的,比如說1206、1210、1811、2510、2512,最多到2512,其實2512就已經很貴了,要一塊錢以上了。
由于電阻值取值比較小,所以流過電流之后電阻兩端的電壓差比較小,這個時候需要我們設計一個運算放大電路來進行放大。這個時候放大多少倍呢,實際上放大了1+51K/1K=52倍,其中R51和R54是用來進行阻抗匹配的。所以我原先一直說“源”、“ 回路”、“阻抗”,這個地方阻抗的作用是比較大的,如果阻抗不一樣的話,這個地方放大之后的電壓是飄的,不是真正想要的值。
如下圖所示,R61兩端的電壓經過簡單的差分放大之后進行輸出,我們對R62后面的點進行分析,這個點得到的是放大的信號,那么放大多少呢?放大的這個信號是給我們的單片機的,對應的是單片機的AD采樣口,單片機的采樣口一般是3.3V居多,現在5V用的已經不多了,所以說最大電流放大之后對應的電壓不能超過3.3V,因為超過3.3V的話,對于AD采樣來說,已經超過它的最上限值了,所以就沒有意義了。這樣的話,要提前算好這個電機上的最大的電流是多少,這個電阻要選好,放大后不要超過3.3V,最好不要超過3V,這樣測量出來后就比較準。
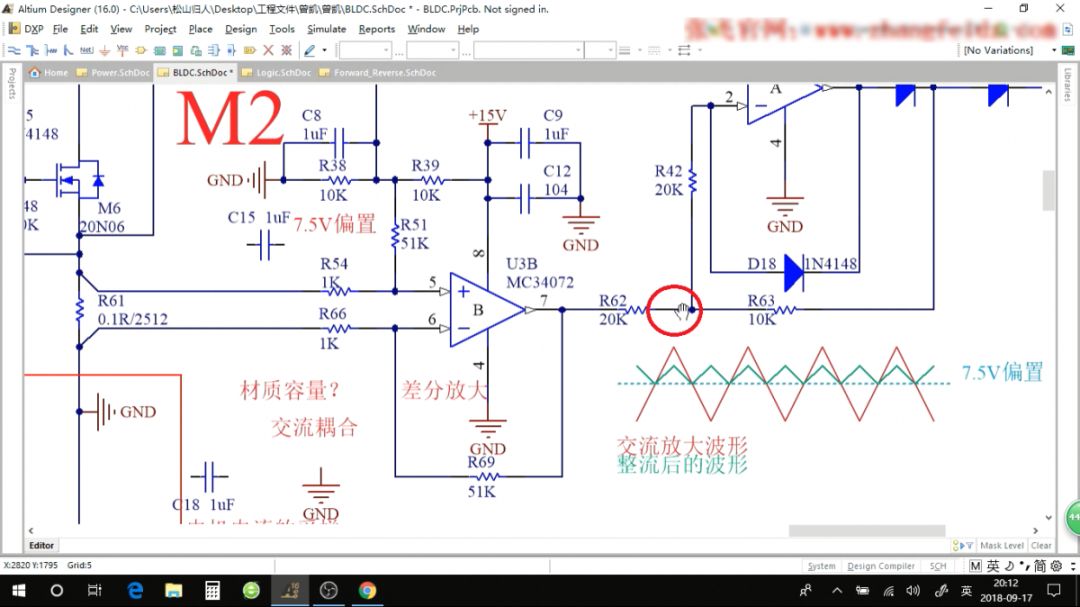
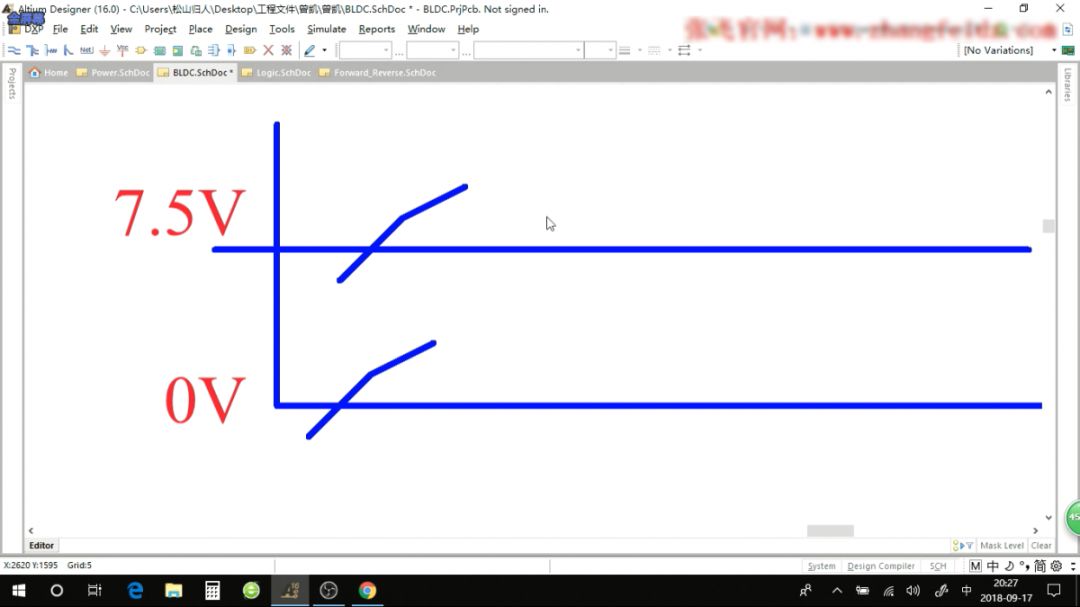
第二,我們要考慮運放,我們輸入端的檢流電阻R61,它的沿是比較陡的,如下圖所示。
一般的運放,我們分高帶寬和低帶寬。如下圖所示,運放的帶寬比較高的話,它的輸出沿是比較陡的,我們也將它稱之為壓擺率,如果壓擺率比較小的話,它的輸出是比較緩的,我們規定1s內上升的電壓值為壓擺率。很明顯第1條紅線1s內上升的電壓值是比較高的,而第二條紅線是比較低的。理想情況下,運放輸出的斜率和前面R61上的斜率是相等的,所以運放的壓擺率比較低的話,在對輸入值進行采樣的話,采樣的值不是真正的值,而是被運放放慢了,所以我們要關注運放的壓擺率問題。當然,如果你的信號是周期比較長的信號,你可以忽略,但是在馬達控制的這個項目里,這個周期是不能忽略的,所以說壓擺率是越高越好,這個就是我們對運放提出的要求。
在檢流電阻這個地方還有一個問題:由于這里的地上會產生干擾,所以這個地方的干擾會耦合進運放里面,干擾耦合進來之后,進入運放之后就會放大,所以說測量出來的信號里面就會帶有很多的干擾,這個干擾是我們不希望看到的。之前有說過,內阻越小,也就預示著電流越大,電流越大,周圍的磁場也就越大,抗外在的干擾能力就越大,所以電流要偏大。運放目前有兩種,一種是DMOS工藝,一種相當于是晶體管工藝。
如果前面的干擾比較大,你可以選擇晶體管工藝的運放,因為晶體管工藝的運放,它的抗干擾能力要強一些,因為它有電流,屬于流控流型。如果前面的干擾比較小的話,你可以選擇DMOS工藝的運放,它的功耗比較低,功耗低的原因是MOSFET的內阻比較大,所以說它的抗干擾能力比較弱,這個也是運放本身我們需要注意的。
另外,運放定好了以后,我們還要注意R69的取值,我們不能取的很大,因為取的越大,電阻網絡的阻值就比較大,電流就比較小,它就比較容易受到干擾,就容易把干擾耦合進來,然后會放大輸出。實驗證明,R69的取值最大不要超過300K,我們要求最大不要超過200K,否則在有干擾的情況下,它的輸出就會帶著干擾,所以不要大于200K,如果說放大一級后還是不夠大怎么辦,那就再加一級,甚至三級放大,也不要在一級上放大到無窮大。
經過放大之后的信號就送給MCU了,MCU根據放大后的電壓值就可以判斷目前的的電流是多大,一旦判斷出這里的電流大了,它就要做一些保護措施,比如說關掉,這個是我們電機電流保護里面最常用的一種方法,直接把電流關掉。還有一種叫限功率,它不能關斷,它只能限功率,例如之前說過的無人機。
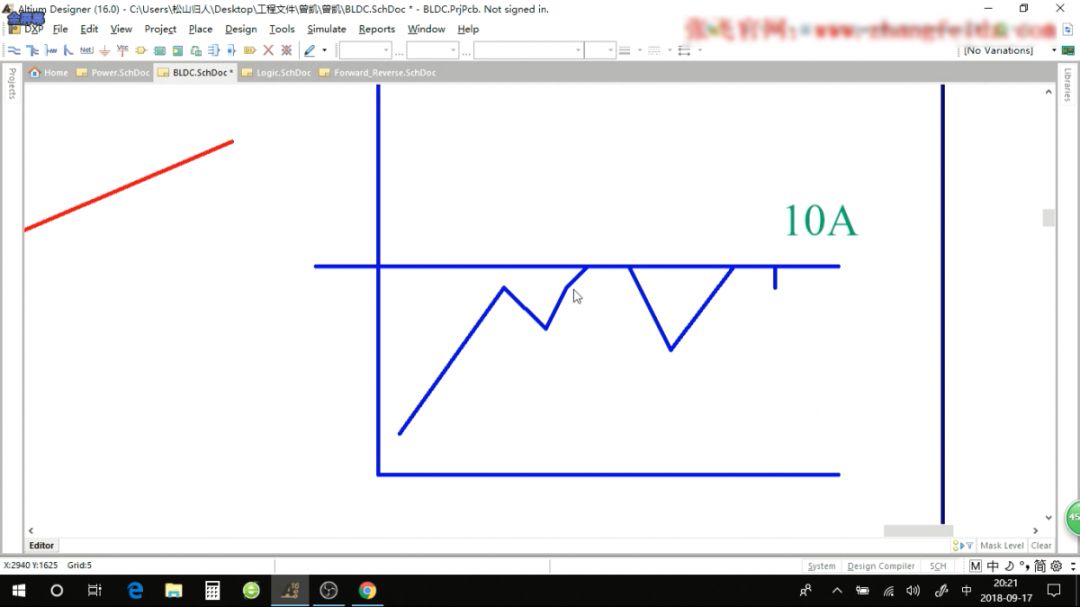
對于限功率,在這里先定義一個值,比如說10A,這個10A是限制的了,不能超過10A,如果超過10A的話,就把它關掉,低于10A,就不管,這個叫削幅。如下圖,如果電流在10A以下,就不管,但是一旦超過了,就把它削平。
這種方式去做的話,我們就需要對電流實時進行采樣,我們看下面,對于三個橋臂來說,只有兩個MOSFET導通。
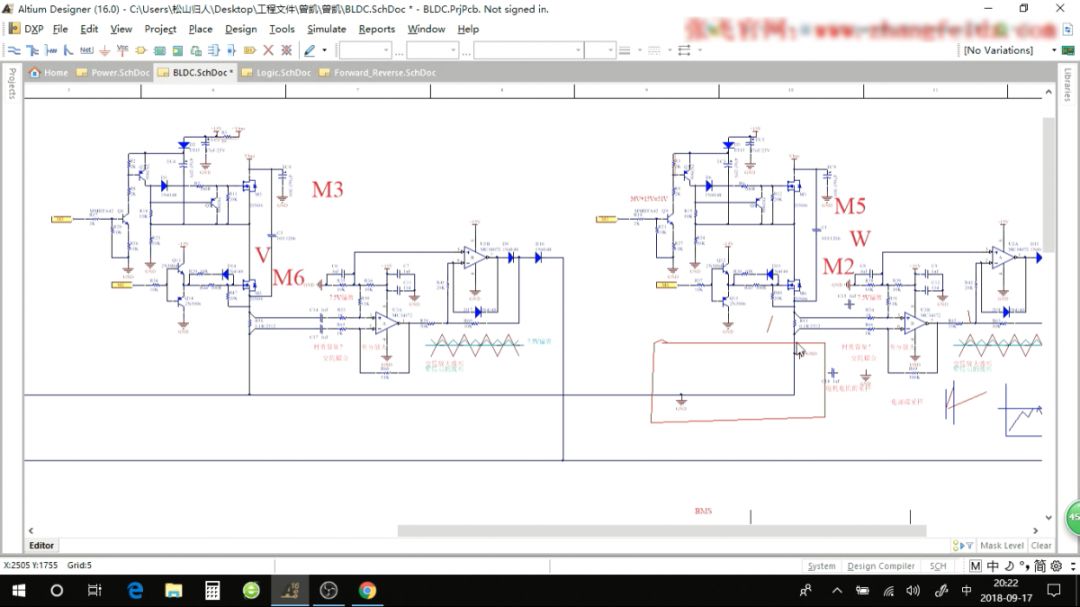
當MOSFET導通時,電阻上才會有電流流過,當管子不導通時,就沒有電流流過。所以,當有時候其中一路MOSFET不導通時,就采集不到值,因此需要對其它路進行采樣。采集之后,就需要對它進行處理,如下圖所示,這里是用硬件的方式進行設計的,實際上,更多的人是用軟件進行處理的,我們視頻里也會和大家詳細講解軟件怎么樣去做電流環、硬件如何去搭一個電流環,那么這里是用硬件去搭的。
實際上,基本的原理很簡單,在我的PFC視頻的第11部至第13部已經詳細講到,就是采用電流跟蹤法,比它高了,就把它削掉,類似于一個比較器一樣。我們可以用一個比較器,比較器的一端是把那3路電流合并之后送過來。
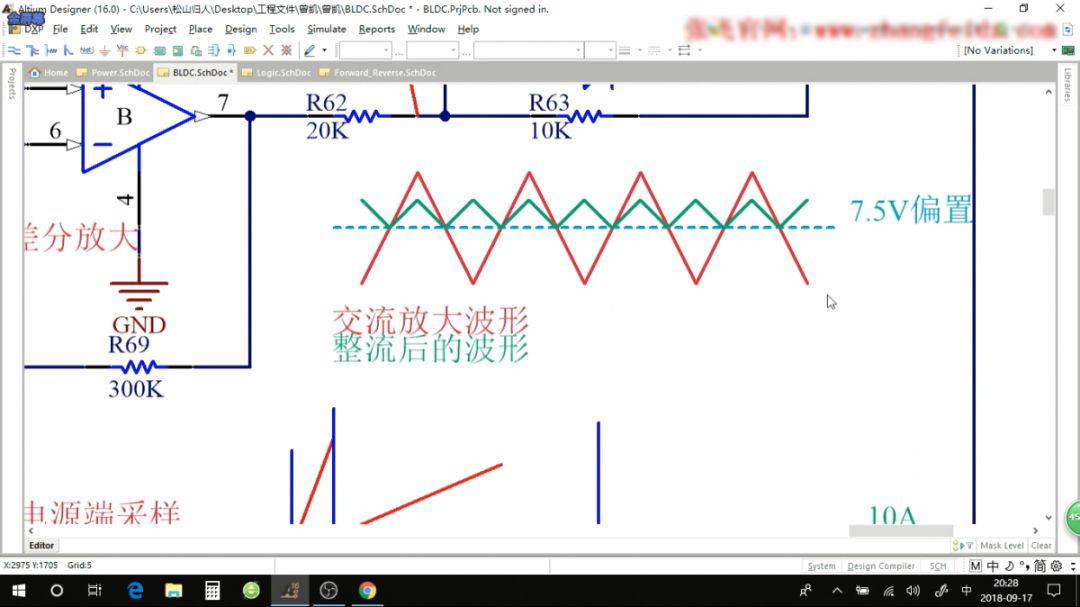
下面這幅圖是整流,因為采集到的信號有些時候是正,有些時候是負,為什么會出現負呢,是因為有的時候會續流,由于電感的作用,電流會從下往上流,這個時候采集到的就是負壓,對于一個運放來說,要想采集到負壓,必須采用雙電源供電。而我們這里是單電源供電,所以負壓是采集不到的,那么該怎么做呢?我們就需要將其抬升,這里是采用偏置電阻,通過分壓之后的7.5V進行抬升。
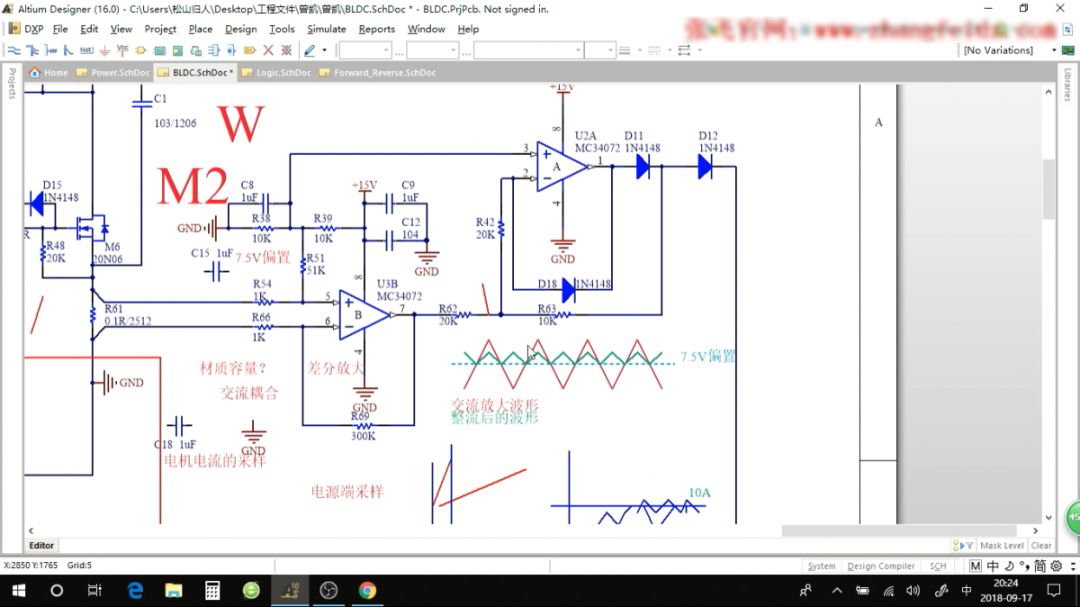
如下圖所示,這里大致畫一下它的意思,對于一個正常的信號來說,它只能看到0V以上的電壓,0V以下的電壓是看不到的。但是這里確實是有負壓,而且續流過程中也有可能存在過流,那么如何將0V以下的進行處理呢?實際上將其抬升就可以,比如說原先存在0V以下的負壓是被截止的,為0V,但是經過7.5V的抬升后,相對于7.5V來看為負壓,但是相對于0V坐標軸來看,電壓是正壓,這樣的話,負壓也可以被采集進來。
抬升電壓的好處是什么呢?可以方便的使用單電源供電的運放,因為現在單電源供電的運放是比較多的,雙電源只在過去用的比較多。采用雙電源運放是一個比較麻煩的事,因為需要去做負壓電源,這樣電路比較復雜,成本也比較高,所以說我們采用單電源這樣的方案去做。
這樣整流后的波形如下圖,這樣比較后的電壓就可以進行處理了,用它進行比較,當它大于某個電壓值的時候,就關閉,當它小于某個電壓的時候,就不管。
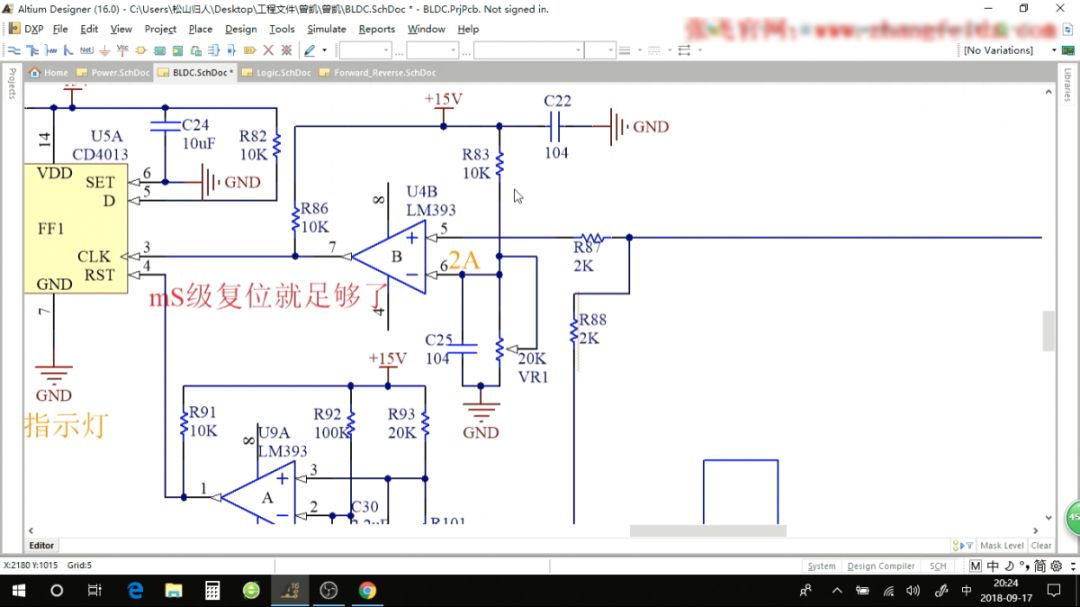
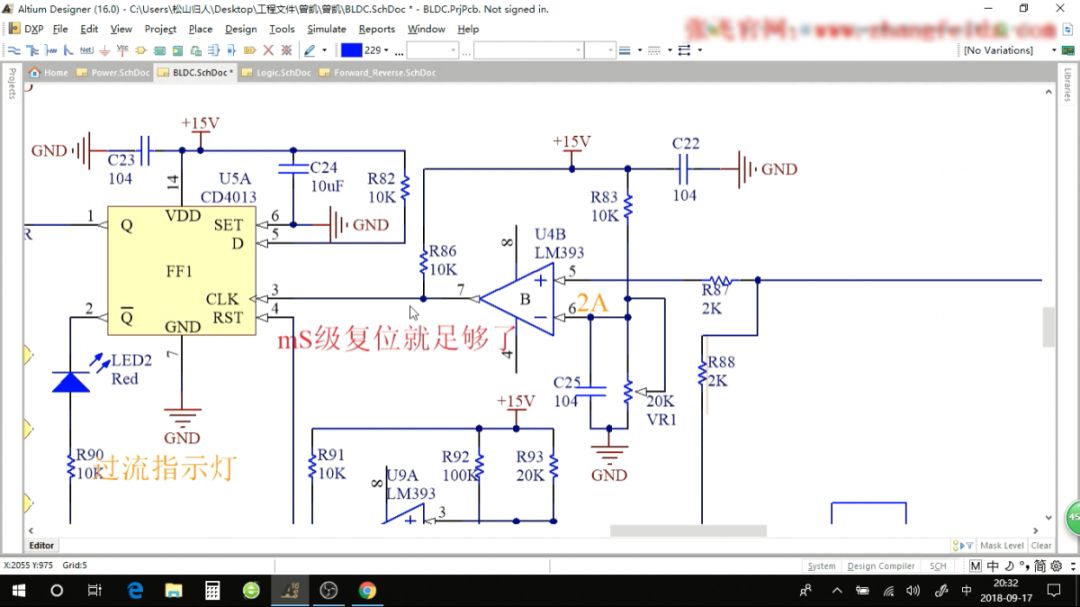
如下圖,合成之后的電壓送到比較器的“+”端,這個電壓反應的就是電流,這里是采用硬件電路來做的。剛才提到的為7.5V,具體情況需要自己來確定。假設現在限制的為2A,其中VR1和R83分壓后的電壓值等效為2A,那么合成之后的電壓就和等效成2A的電壓進行比較,如果它超過2A,那么比較器就輸出為高,否則輸出為低。那么輸出高或者低時,如何進行一個電流的控制呢?
對于電機的電流的控制,實際上是用PWM來進行調速的,也就是PWM的占空比寬了或者窄了來反應速度的高和低。這樣的話,我們分成前一個周期和下一個周期來看,如果前一個周期開的時間小了(占空比小),反應的電流也就小了,電流小的話,我們不管,但如果做電流精確控制的話,電流小的話,我們是需要管的,在下一個周期將占空比調大些,就是實時監控電流,但是我們這里關注的是“高”,如果上一個周期的電流超過了我的設定值,那么我們就將它關掉,等到下一個周期到來時,我們再做一次電流判斷。
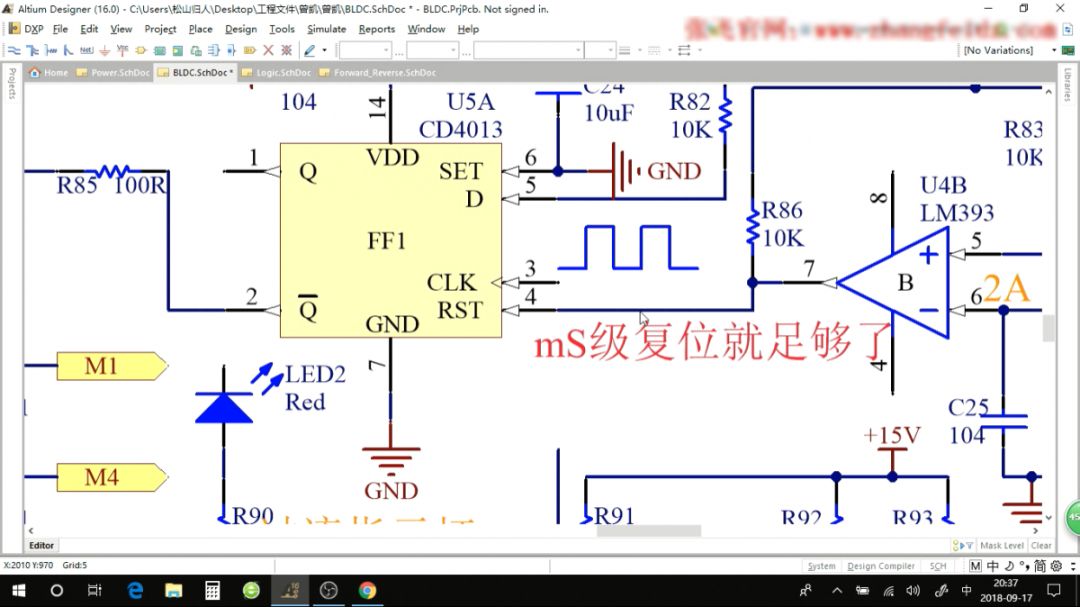
如果判斷電流低了,沒有超過的話,我們再繼續去開通,但是如果判斷電流依舊是超過的話,那么我就繼續關斷,也就是通過丟占空比的方式來實現。那么對于比較器的電路就比較容易理解了,通過比較器U4將采集到的電流(實際上是電壓)和設定的電流(實際上是電壓)進行比較,如果比它大,那么比較器輸出高,對于CD4013來說,CLK為上升沿,把D處的電壓送到Q端并進行鎖存,而此時D端通過上拉電阻到+15V,所以Q端為高,當Q端為高時,通過MOS管的驅動電路將MOS管關斷,電流就會下降,采用這種方式進行保護。
對于恒功率輸出,需要對電路進行修改,如下圖,RST接比較器輸出,CLK接正常的PWM波,接輸出,一旦過流了,比較器輸出為高,RST輸入為高,Q輸出就為低,就為高。如果過流狀態持續,下一個周期來臨時,RST還是為高,那么Q還是為低,還是為高,除非RST為0(不過流),那么Q才為高,才為低,這樣就實現了保護。
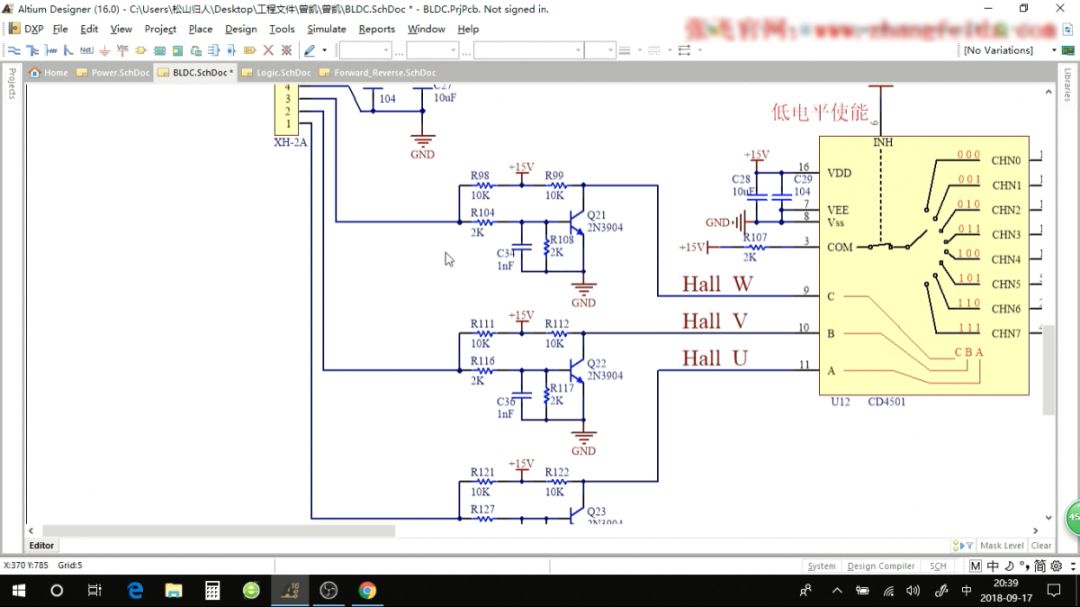
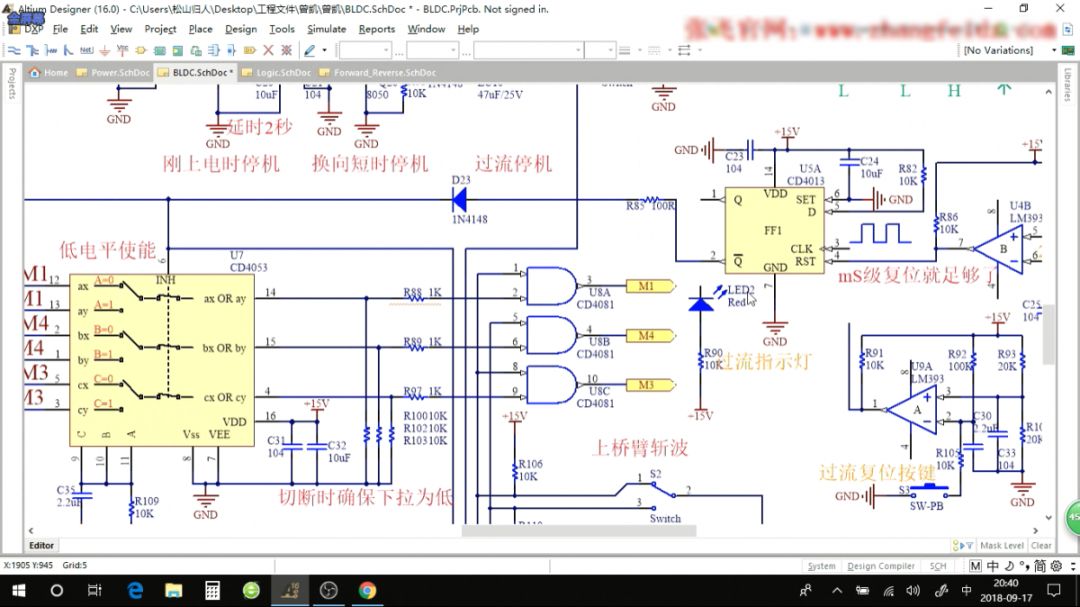
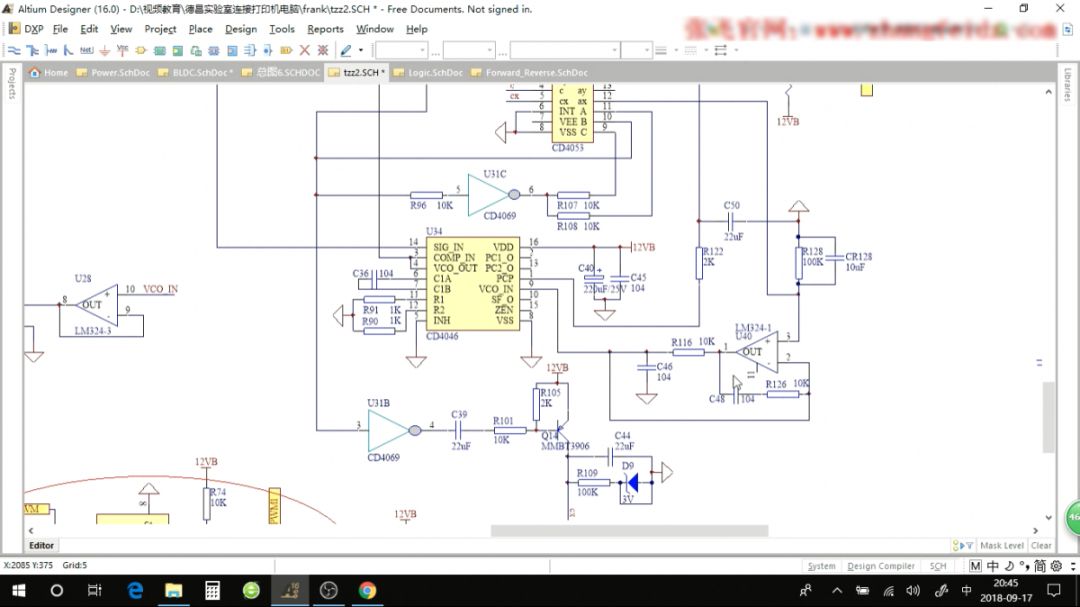
上面所說的電路方案是通過有位置搭建的,采用霍爾的方式,如下圖,霍爾的信號通過多路選擇開關,將三路霍爾信號轉換成六路輸出,六路信號通過與或門電路輸出再送到CD4053模擬開關,再經過CD4081輸出控制M1、M4、M3,進而控制MOS管的開通和關斷,以上所說的是有位置的方波電路,當然還有其他的方案電路,比如有位置正弦波、無位置方波、無位置正弦波。
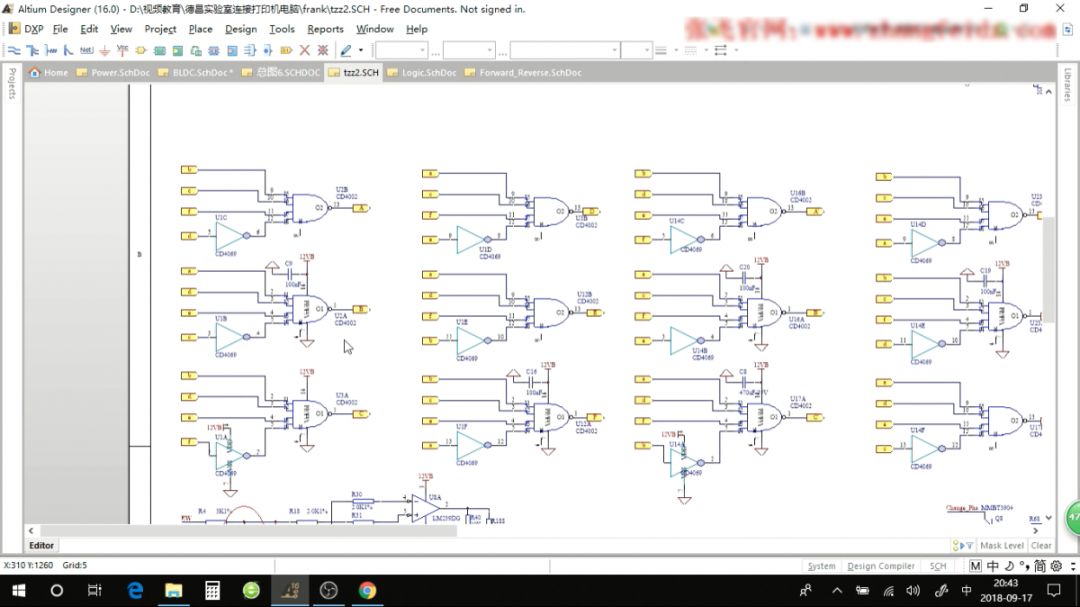
下面再給大家簡單介紹一下無位置的三相馬達電路,這個電路就復雜了些。
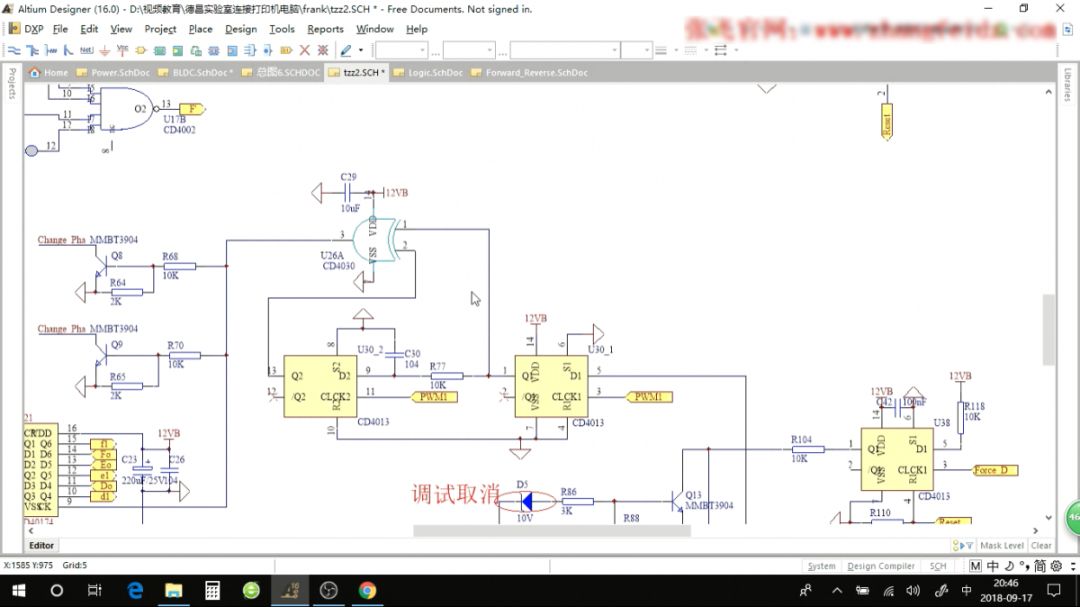
如下圖所示,這是一個譯碼電路,馬達轉起來之后,需要將無霍爾轉換成有霍爾,虛擬出一個霍爾,進而判斷出它的位置,以及到下一項如何導通,根據當前的導通相序推出下一個導通相序。
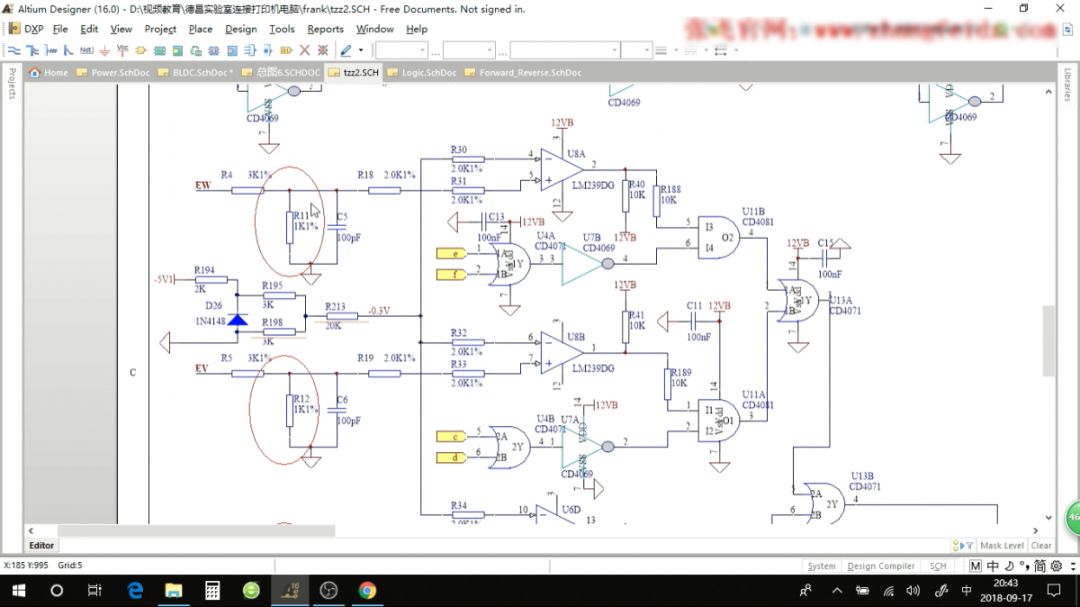
下圖的這個電路是抓取當前相線的反電動勢,低轉速時采用電流檢測法來做,高轉速時,則采用電壓檢測法來做。最后再將高速、低速這兩項進行合成,合成之后進行鎖相環跟蹤,跟蹤后面需要進行換向和位置的儲存。
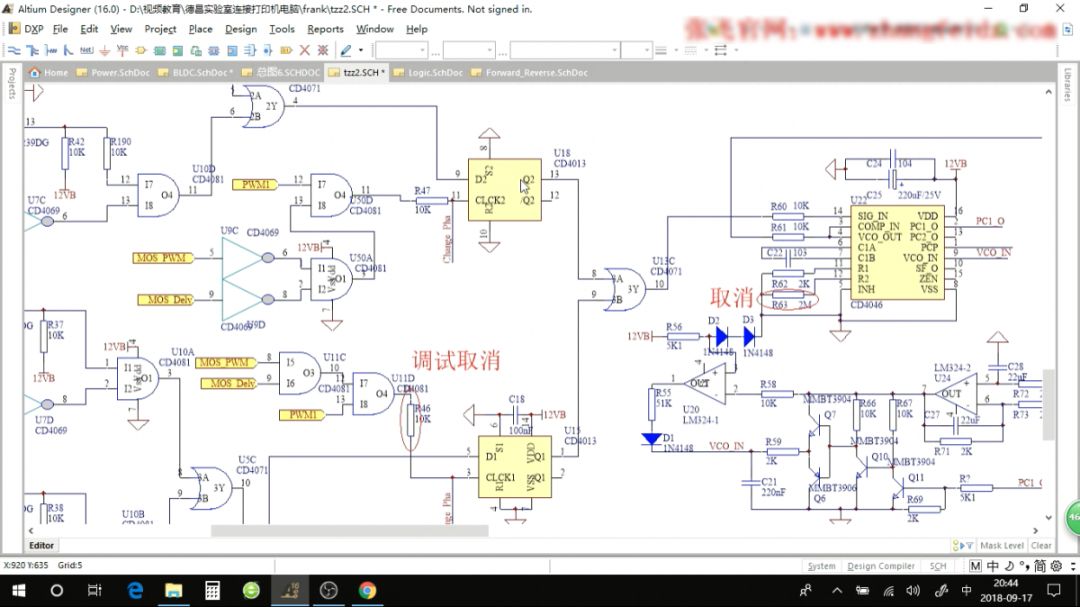
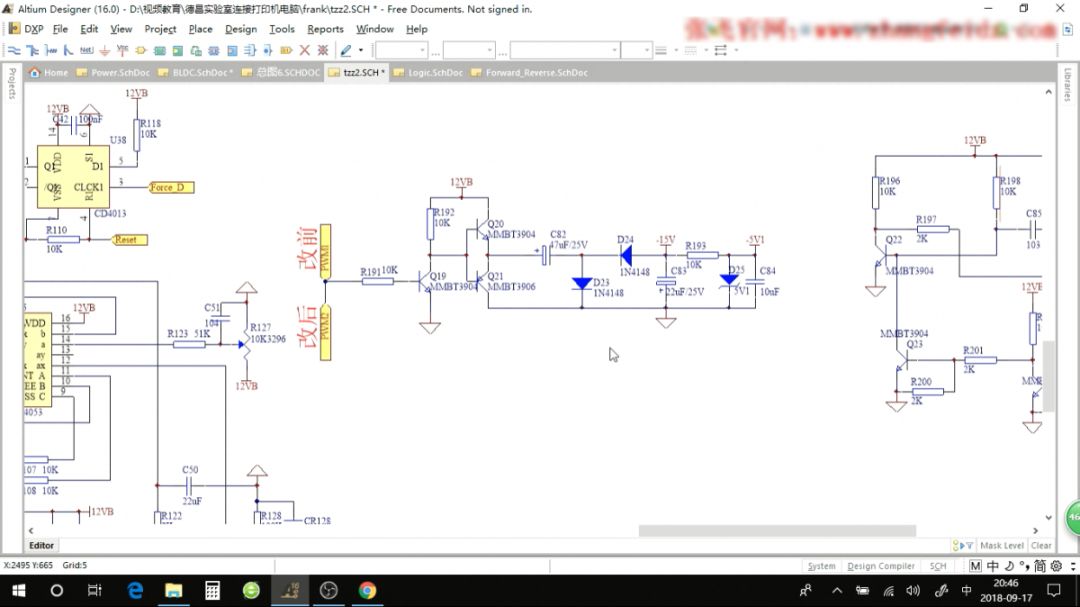
下面的這個電路是實現電機的強拖,拖到一定程度之后需要替換。
下面這個電路是實現負壓,在低轉速時需要用到負壓。
下面的這個電路是實現的消隱,馬達在每次換向之后都需要進行消隱,是不能采集的。
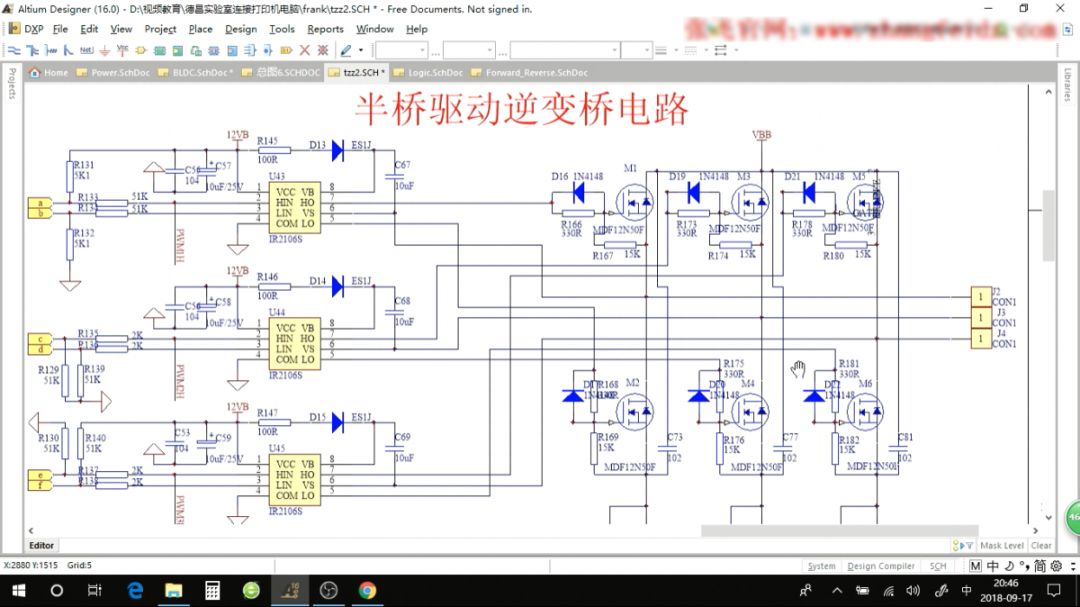
下面的電路是三相橋電路。
這個方案就是把軟件做的工作給換成硬件搭建實現,所以說軟硬件是不分家的
-
電機
+關注
關注
143文章
9296瀏覽量
149384 -
驅動電流
+關注
關注
0文章
92瀏覽量
16279
原文標題:史上最全!圖文并茂解析馬達驅動電流環設計(干貨分享)
文章出處:【微信號:elecfans,微信公眾號:電子發燒友網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
模擬電子技術的重點及難點簡析
光伏組件接線盒自動焊接機有哪些技術上的難點?如何去解決?
步進驅動器工作原理_步進電機驅動器上撥碼開關怎樣設置

設計一個簡單的白光LED驅動器電路
伺服驅動器一上電就報過載解決方法及具體案例
驅動電路設計(一)—— 驅動器的功能綜述






 工商網監
工商網監
評論