") 車身周圍:從魚眼視圖到鳥瞰全景視圖
車身周圍:從魚眼視圖到鳥瞰全景視圖
車身周圍:從魚眼視圖到鳥瞰全景視圖 (中文字幕)
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
Maxim
+關(guān)注
關(guān)注
8文章
859瀏覽量
88414 -
汽車電子
+關(guān)注
關(guān)注
3036文章
8273瀏覽量
169708
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
開發(fā)工具e2s/Keil/RASC使用說明
e2s的界面包含如下幾個元素:透視圖、窗口、窗格和選項卡等。透視圖的這個概念,可以把它理解為一個特定的整體軟件界面,比如最常用的透視圖是C/C++透視圖(默認(rèn))、FSP配置透

LITESTAR 4D應(yīng)用:室內(nèi)籃球場照明
(包括領(lǐng)邊區(qū)域)
籃網(wǎng)的高度為 3 米,領(lǐng)邊為 5 米
安全空間為領(lǐng)邊兩側(cè)各為 5 米,兩端各約為 4 米。
在場館周圍安置觀眾席和相關(guān)設(shè)施。
設(shè)計方案 (截取部分報表)
場景數(shù)據(jù)/燈具信息:
2D俯視圖 :
2D后視圖 :
發(fā)表于 05-27 08:45
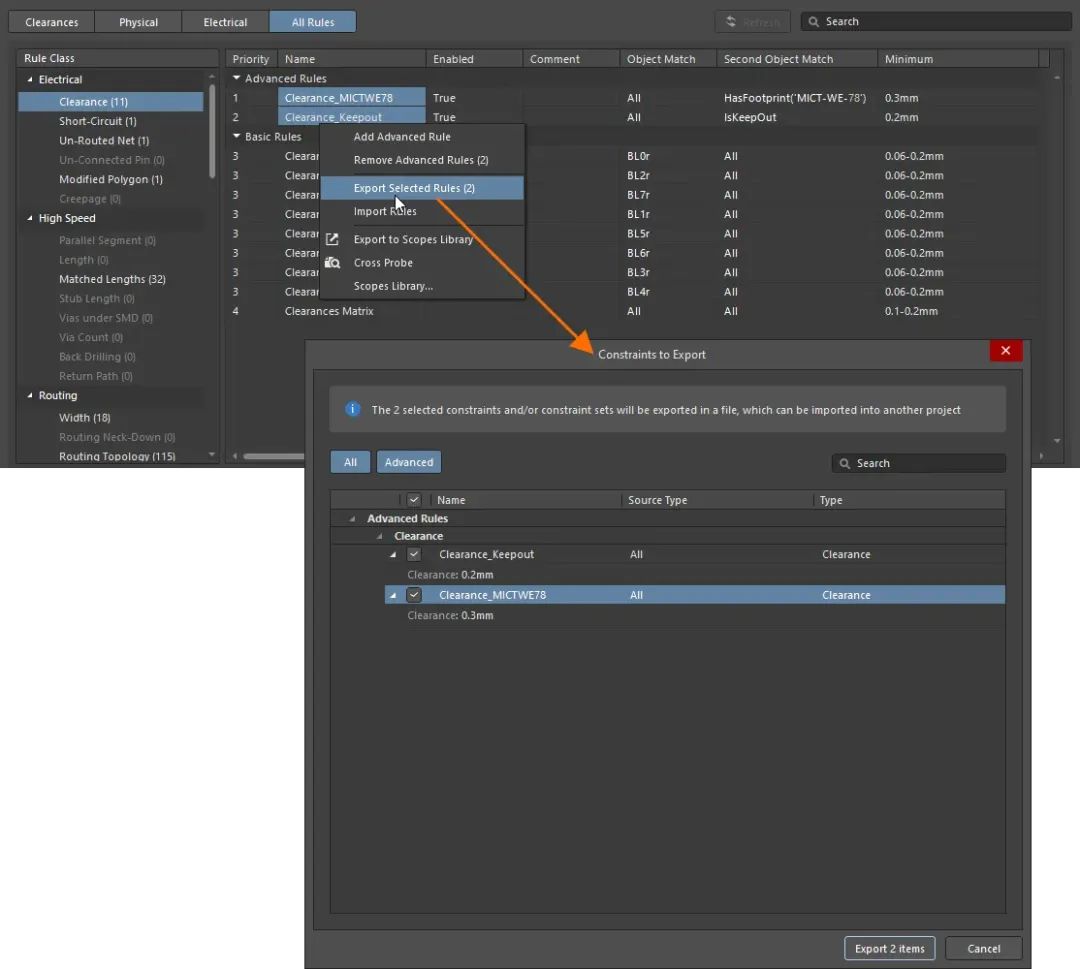
Altium Designer 25.5.2版本的新功能
從 PCB 訪問約束管理器時,現(xiàn)在可通過 All Rules 視圖導(dǎo)入和導(dǎo)出高級規(guī)則。
車身附件檢測項目詳述
本文聚焦于汽車車身附件檢測領(lǐng)域,旨在全方位、系統(tǒng)性地剖析車身附件檢測的關(guān)鍵項目、先進(jìn)技術(shù)手段、現(xiàn)行標(biāo)準(zhǔn)規(guī)范以及未來發(fā)展走向。研究范圍涵蓋各類常見汽車車身附件,包括但不限于車燈、保險杠、后視鏡、車窗、內(nèi)飾件、車頂行李架等,深入探究

DuxCam G2S全景相機(jī),提供360°全景測繪解決方案
仍提供多功能的硬件連接接口、可實現(xiàn)精確的攝像頭設(shè)置和觸發(fā)控制, 使其成為真正意義上的“六邊形戰(zhàn)士”,滿足街景地圖生成、道路測量、資產(chǎn)檢查、高精度地圖特征提取等應(yīng)用。
一、光學(xué)系統(tǒng)革新:從像素到空間
發(fā)表于 04-07 16:26
VirtualLab Fusion應(yīng)用:創(chuàng)建1D圖
摘要
該用例通過一個有意思的展示,示范了如何配置一維圖。 VirtualLab Fusion允許用戶各種調(diào)優(yōu),從軸名稱和單位到插值和配色方案。 換言之,所有設(shè)置都在GUI級別上配置,這使沒有編程經(jīng)驗
發(fā)表于 03-17 11:20
.NET開發(fā)者必看:JetBrains Rider Tasks(任務(wù))視圖功能解析與演示教程
此前,JetBrains Rider推出了Tasks(任務(wù))視圖功能,為 .NET 開發(fā)者帶來強(qiáng)大的任務(wù)管理和調(diào)試工具。該功能已在JetBrains Rider 2024.2 EAP中上線。歡迎聯(lián)系JetBrains授權(quán)合作伙伴-龍智,立即體驗試用Rider。

車身骨架焊接技術(shù)解析與應(yīng)用
車身骨架是汽車結(jié)構(gòu)中最為關(guān)鍵的部分之一,它不僅決定了車輛的整體剛性和安全性,還直接影響到汽車的制造成本和生產(chǎn)效率。在現(xiàn)代汽車制造中,車身骨架的焊接技術(shù)尤為重要,其不僅關(guān)乎汽車的安全性能,還關(guān)系到汽車

VirtualLab Fusion應(yīng)用:使用光波導(dǎo)元件模擬“HoloLens 1”型布局
顏色視圖)
橫向均勻性評價
為了評估人眼觀察區(qū)域內(nèi)的橫向均勻性,提供了均勻性檢測器,它可以在元件列表中找到(在探測器(Detectors)>評價函數(shù)(Merit Functions
發(fā)表于 02-06 08:58
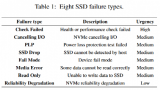
MVTRF:多視圖特征預(yù)測SSD故障
多任務(wù)隨機(jī)森林( MVTRF )方案。MVTRF基于從SSD的長期和短期監(jiān)測數(shù)據(jù)中提取的多視圖特征預(yù)測SSD故障。特別地,采用多任務(wù)學(xué)習(xí),通過同一模型同時預(yù)測什么類型的故障以及何時發(fā)生。本文還提取了MVTRF的關(guān)鍵決策來分析為什么會發(fā)生故障。這些故障細(xì)節(jié)將有助于驗證和處理
使用光波導(dǎo)元件模擬“HoloLens 1”型布局
顏色視圖)
橫向均勻性評價
為了評估人眼觀察區(qū)域內(nèi)的橫向均勻性,提供了均勻性檢測器,它可以在元件列表中找到(在探測器(Detectors)>評價函數(shù)(Merit Functions
發(fā)表于 12-23 19:33
使用光波導(dǎo)元件模擬“HoloLens 1”型布局
顏色視圖)
橫向均勻性評價
為了評估人眼觀察區(qū)域內(nèi)的橫向均勻性,提供了均勻性檢測器,它可以在元件列表中找到(在探測器(Detectors)>評價函數(shù)(Merit Functions
發(fā)表于 12-13 10:00
建筑物邊緣感知和邊緣融合的多視圖立體三維重建方法
航空建筑深度估計是三維數(shù)字城市重建中的一項重要任務(wù),基于深度學(xué)習(xí)的多視圖立體(MVS)方法在該領(lǐng)域取得了較好的成果。目前的主要方法通過修改MVS 框架實現(xiàn)建筑物的深度估計,缺乏對建筑物內(nèi)在結(jié)構(gòu)的考慮,易導(dǎo)致精度不足等問題。

【9月3日|線上講堂】從衛(wèi)星通信技術(shù)到測試方案全景解析
2024年9月3日周二19:00-20:30中星聯(lián)華科技將舉辦《從衛(wèi)星通信技術(shù)到測試方案全景解析》“星”“星”之火系列線上講堂。本期會議我們將為大家介紹衛(wèi)星通信的基本概念,并深入解讀當(dāng)前衛(wèi)星產(chǎn)業(yè)鏈







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論