") 旋轉(zhuǎn)編碼器使用方法
旋轉(zhuǎn)編碼器使用方法

旋轉(zhuǎn)編碼器使用方法
使用方法一:修改驅(qū)動(dòng)程序
旋轉(zhuǎn)編碼器屬于精密儀器,在其使用過程中需通過程序發(fā)出指令,才能起到特定的作用,而根據(jù)不同環(huán)境下的需求,需要設(shè)定不同的驅(qū)動(dòng)程序,所以說決定編碼器使用效果怎么樣,修改合適的驅(qū)動(dòng)程序是非常重要的。通常情況下只要直接修改reg文件,同時(shí)注冊(cè)一個(gè)表文件,利用添加的方式改寫動(dòng)態(tài)鏈接,在確定動(dòng)態(tài)鏈接已經(jīng)修改好的情況下,需要將其添加到內(nèi)核中;
使用方法二:硬件接口連接
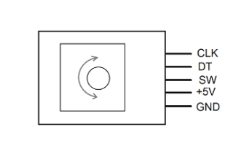
驅(qū)動(dòng)程序修改好之后,下面就是硬件接口連接操作,在連接中,通常有A和B兩個(gè)集電極輸出接口, 為確保線路銜接性,需要在3.3V上的電阻上進(jìn)行操作,將A和B兩個(gè)接口分別插到CPU上。在硬件接口連接成功之后,以防萬一,須做好測(cè)試工作檢查電壓輸出端高低壓數(shù)值是否正確,比如在按下按鈕之后,如果P2端口輸出值是高電平的話,說明連接正確;
使用方法三:流接口驅(qū)動(dòng)程序的編寫
流接口驅(qū)動(dòng)程序的編寫是為下面的中斷服務(wù)程序做準(zhǔn)備,具 體編寫步驟是創(chuàng)建線程實(shí)現(xiàn)變量值的記錄,同時(shí)記錄在線路中斷的情況下,各端口的數(shù)值是否還是高電平;
使用方法四:中斷服務(wù)程序的編寫
終端服務(wù)程序編寫主要是起到編碼器線路保護(hù)作用。通過對(duì)CPU的I/O接口進(jìn)行初始化工作,在此基礎(chǔ)上編寫中斷服務(wù)程序。
旋轉(zhuǎn)編碼器使用說明
1. 確定檢測(cè)對(duì)象,測(cè)速、測(cè)距、測(cè)角位移還是計(jì)數(shù)等。
2.僅用于動(dòng)態(tài)過程還是包含靜態(tài)位置或狀態(tài)。
3.確認(rèn)是擇增量型旋轉(zhuǎn)編碼器還是絕對(duì)型旋轉(zhuǎn)編碼器。
4.確定對(duì)象的運(yùn)動(dòng)范圍。
5.確認(rèn)是選擇單圈絕對(duì)型旋轉(zhuǎn)編碼器還是多圈絕對(duì)型旋轉(zhuǎn)編碼器。
6.確定對(duì)象的最高速度或頻率。
7.確定對(duì)象的精度要求。
8.確定選擇旋轉(zhuǎn)編碼器的應(yīng)用參數(shù)。
9. 使用環(huán)境,注意旋轉(zhuǎn)編碼器的接口方式和保護(hù)等級(jí)。
-
編碼器
+關(guān)注
關(guān)注
45文章
3785瀏覽量
137527 -
旋轉(zhuǎn)編碼器
+關(guān)注
關(guān)注
5文章
160瀏覽量
26280
發(fā)布評(píng)論請(qǐng)先 登錄
磁旋轉(zhuǎn)編碼器在永磁同步電機(jī)位置測(cè)量中的應(yīng)用(可下載)
磁環(huán)編碼器:精準(zhǔn)定位與高效旋轉(zhuǎn)控制的創(chuàng)新解決方案
DISCOAA編碼器類型功能
編碼器使用指南或操作手冊(cè)

伺服編碼器接線方法 伺服編碼器線可以自己延長(zhǎng)嗎?
編碼器種類大觀:探索技術(shù)前沿與應(yīng)用創(chuàng)新
二進(jìn)制編碼器與絕對(duì)編碼器的區(qū)別
AksIM-2離軸旋轉(zhuǎn)絕對(duì)編碼器數(shù)據(jù)表
增量式編碼器單圈和多圈怎么知道,如何分辯?

旋轉(zhuǎn)編碼器的類型以及選擇與設(shè)計(jì)注意要點(diǎn)
旋轉(zhuǎn)編碼器可以收集并發(fā)出什么信號(hào),旋轉(zhuǎn)編碼器信號(hào)異常怎么處理
如何實(shí)現(xiàn)比較器以提高工業(yè)驅(qū)動(dòng)應(yīng)用中旋轉(zhuǎn)編碼器的性能

Unit-Scroll|滾輪旋轉(zhuǎn)編碼器拓展單元

帶Arduino的旋轉(zhuǎn)編碼器設(shè)計(jì) 旋轉(zhuǎn)編碼器的工作原理和特點(diǎn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論