 光學編碼器具備的優勢與設計應用
光學編碼器具備的優勢與設計應用
手機相機的光學變焦功能避免了數碼變焦引起的質量下降,但目前的實施方式往往是嘈雜,笨重和耗電。 Avago的AEDR-8400編碼器采用獨特的方法解決了上述每個問題。
簡介
廣泛的商業應用使用具有縮放機制的攝像機。也許最普遍的應用是相機手機。相機變焦的關鍵設計標準包括低功耗,當然還有空間限制。本文介紹了一種光學編碼器技術,它為相機變焦設計提供了一種新方法來應對這些挑戰。
光學和數字變焦
相機手機可能具有光學變焦,數碼變焦或兩者兼而有之。光學變焦改變了相機鏡頭的有效焦距,使得原始圖像被放大并且可以由CCD或CMOS圖像傳感器捕獲。通過更大的放大率,光在整個圖像傳感器上散布,并且可以使用所有像素。光學變焦可以被解釋為真正的變焦,可以提高拍攝圖像的質量。另一方面,數碼變焦有點不同。在這種情況下,應用軟件算法而不是硬件移動(即,鏡頭定位的改變)以放大圖像。這種放大僅涉及捕獲圖像的特定部分。這被稱為插值技術。使用這種技術或算法需要添加信息以便放大相應的圖像部分。看起來捕獲的圖像可能會被放大。然而,僅使用了實際圖像信息的某一部分,而圖像的其余部分來自插值輸出。有一點值得一提的是,數字變焦越高,真實信息的部分就越小。被采取。因此,許多最初捕獲的圖像傳感器信息將被丟棄,更多插值的圖像數據將被合并到合成圖像中。因此,光學變焦是確定相機真實變焦能力的重要機制。手機不丟失任何圖像數據。光學變焦中精確的鏡頭定位控制對于確保放大圖像的質量至關重要。圖1示出了來自相機電話內部的相機模塊的縮放機制的典型示例。對準透鏡使得圖像可以聚焦到圖像傳感器上。變焦機構涉及兩個或更多個鏡頭的同步移動。通過改變透鏡之間的距離,相機鏡頭的實際有效焦距相應地改變。因此,圖像傳感器將捕獲放大的圖像。
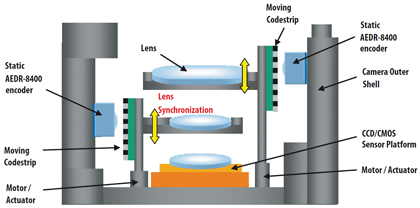
圖1:使用AEDR-8400編碼器的相機手機中的典型縮放機制。
簡化了接線過程,編碼器安裝在攝像頭模塊外殼上并保持固定位置。移動部分是代碼條,它充當鏡頭線性移動的轉換器。將窗口和條形圖像投射回編碼器可提供所有必要信息的反饋,以便快速準確地定位鏡頭。對于傳統的變焦機構,機械凸輪和齒輪傳動的組合是鏡頭位置控制的常用方法。然而,這種方法將遭受不可避免的磨損問題,并且鏡頭定位的準確性會隨著時間的推移而降低并直接影響縮放圖像的質量。
Avago Technologies的AEDR-8400編碼器可以幫助解決這些縮放問題的問題。當齒輪和機械凸輪出現任何反向綁定時,編碼器的反饋為實時校準提供必要的信息。這有助于確保精確和準確的鏡頭定位。此外,在一些定制的相機模塊設計中,可以移除機械凸輪(參見圖2)。
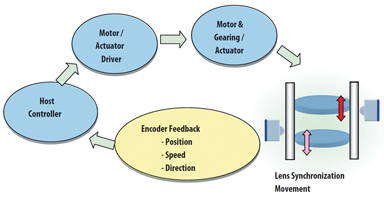
圖2:帶編碼器反饋的縮放機制例如,將AEDR-8400編碼器集成到壓電執行器相機模塊中,可以基本上消除機械凸輪的使用。并且,由于沒有機械凸輪參與,因此沒有固定的變焦位置,新的相機模塊系統可以使用連續變焦功能(參見圖3)。
在功耗方面,壓電執行器系統傾向于消耗與音圈和伺服解決方案相比功耗更低。此外,壓電執行器解決方案可以幫助將噪聲和振動水平保持在最低水平,這是步進電機或音圈解決方案無法實現的目標。
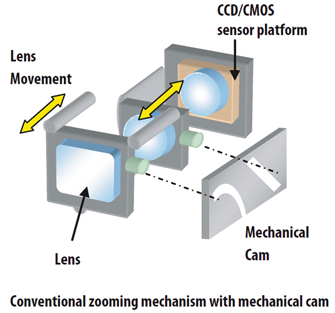
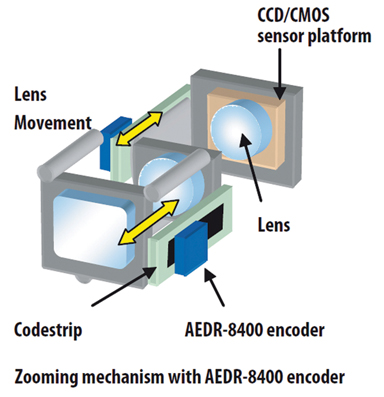
圖3:AEDR-8400編碼器,用于照相手機中的變焦機構。
編碼器工作原理
微型增量編碼器AEDR-8400采用表面貼裝無引腳封裝,尺寸為3.00 x 3.28 x 1.26 mm,使其成為具有數字輸出的最小光學編碼器。它在單個SO-6(小外形,6針)封裝中集成了LED光源和光電探測器IC,采用反射技術來感應旋轉或線性運動。小尺寸和反射技術使編碼器可用于廣泛的商業應用,特別是在空間和重量是主要考慮因素的情況下,例如照相手機中的變焦機制。該編碼器提供每英寸254行的分辨率,相當于每毫米10行,具有兩個通道數字輸出。編碼器可在-20°C至85°C的溫度范圍內工作。照相手機的相機模塊中的一個關鍵標準是能夠在較低的電壓水平下操作。 AEDR-8400編碼器的典型工作電壓為2.8 V,可以輕松滿足此應用的需求。圖4顯示了AEDR-8400編碼器的光學布置,與反射式編碼條一起使用,其中鏡頭聚焦光線從LED到編碼條的窗口和條形圖。
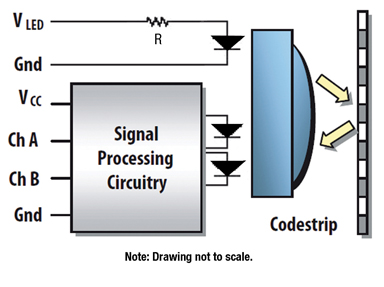
圖4:反射編碼器的光學排列。
窗口和條形圖的反射圖像是專注于光電二極管。當編碼條移動時,由窗口和條形投射的光和陰影的交替圖案分別落在光電二極管上。檢測器IC將此模式轉換為數字,TTL兼容輸出,表示碼帶線性運動,從而表示鏡頭的運動。一個重要的參數是分辨率,它被定義為單位距離中窗口/條的密度,通常定義為每英寸線數或每毫米線數。更高的分辨率意味著更精細地控制線性運動。
AEDR-8400編碼器的設計使得編碼器的LED和檢測器IC應平行于窗口/條的方向放置。因此,編碼器對徑向游隙很穩健。這個概念如圖5所示。與步進電機解決方案或音圈解決方案相比,整體相機模塊設計可以縮小。電機尺寸與壓電執行器相當。然而,機械凸輪和齒輪傳動的移除使得整個相機模塊的尺寸能夠進一步降低,以滿足現有的市場需求。
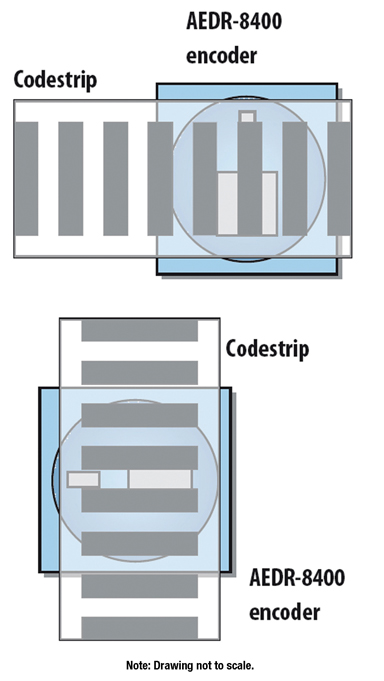
圖5:從頂部看,發射器/探測器相對于窗口/條的光學對準。
AEDR-8400編碼器有助于在兩個鏡頭之間提供精確的定位控制,從而獲得更高質量的圖像。此外,可以快速準確地執行鏡頭移動的同步。
編碼器輸出,即通道A和通道B,以其正交關系為特征,通道之間的相移為90電角度。另外,信道的特征還在于它們的四個狀態(例如狀態1到狀態4),每個狀態跨越標稱的90電角度。關于線性運動的信息,例如移動速度和行進的距離,可以從輸出的參數中導出,例如脈沖周期和脈沖數。同時,線性運動的方向由兩個輸出之間的相位關系確定。當代碼帶在一個方向上移動時,通道A將通道B引導90電角度。當代碼條沿另一個方向移動時,通道B將引導通道A相同的量。通過編碼器輸出的正交解碼可以實現高于碼帶的分辨率,其中存在不同的解碼級別。計算一個信道(例如信道A)的每個上升沿被稱為1X解碼。通過計算一個通道的每個上升沿和下降沿可以使代碼帶分辨率加倍,從而進一步提高分辨率。這稱為2X解碼。當使用通道A和通道B的每個轉換(或每個邏輯狀態)時,可以實現4X解碼。
代碼條
代碼條表面必須是反射的和鏡面的(鏡像的)以便圖像圖案反射回AEDR-8400編碼器的光電二極管。潛在的材料包括金屬和反射膜。確定編碼條是否適用于反射光學編碼器的一種方法是使用散射儀。
通過設備測量的鏡面反射率為60%或更高的反射表面與反射編碼器兼容。非反射區域的反射率應小于百分之十。
當測試鏡面反射時,反射表面應與非反射表面分開測試。建議單獨測試反射表面。然后測試非反射表面。避免在圖案化表面上進行測試,因為這只會在圖案上提供平均反射率。
未來的編碼器技術
Avago Technology正在開發新的編碼器技術,它將索引通道與現有的兩個數字輸出通道集成在一起。該索引通道將有助于消除對光電斷路器的需要,以指示鏡頭的行程范圍的限制或結束。此外,下一代編碼器還具有內置插補器,允許用戶將插值因子設置為304LPI基本分辨率的一倍,兩倍或四倍。
-
手機
+關注
關注
35文章
6932瀏覽量
159250 -
編碼器
+關注
關注
45文章
3780瀏覽量
137292 -
攝像機
+關注
關注
3文章
1689瀏覽量
61100
發布評論請先 登錄
伺服電機編碼器怎么選型

光學編碼器:精準測量與定位的高科技解決方案
絕對式編碼器在伺服電機控制中的應用與優勢分析


拉線編碼器的應用場景與優勢
編碼器類型詳解:探索不同編碼技術的奧秘

增量編碼器與絕對值編碼器的區別

二進制編碼器與絕對編碼器的區別
二進制編碼器應用場景 二進制編碼器與模擬編碼器比較
磁電式編碼器好還是光電式編碼器
磁電編碼器和光電編碼器的區別

伺服電機編碼器種類有哪些?
帶Arduino的旋轉編碼器設計 旋轉編碼器的工作原理和特點





 工商網監
工商網監
評論