 無人機航測與傳統測量的比較,無人機在項目外業中的應用
無人機航測與傳統測量的比較,無人機在項目外業中的應用

一、無人機航測與傳統測量的比較
傳統的測繪專業,給每個人的第一印象就是一個人身上背著儀器,肩膀扛著三腳架,翻山越嶺,日曬雨淋,但是隨著無人機航空攝影測量技術的發展,無人機航測在測繪領域中引發了一場革命性質的變化。無人機航測是無人機根據提前規劃的航線,設置的重疊率,調整的相機參數,然后進行等時間或者等距離采集正射影像。無人機航測和傳統測量的比較如表1-1所示。
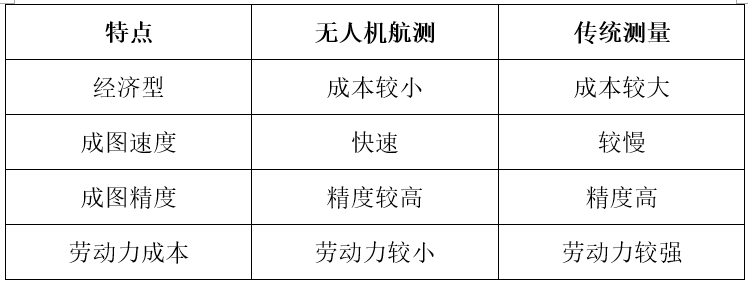
表1-1
通過上面表格的比較,我們可以看出傳統的測量的地形圖精度高,但是對儀器、人員等方面要求較高,同時還受外界因素(天氣、溫度、地形條件等)影響較大,無人機航測具有快速方便、勞動強度低等優點,同時也存在成圖精度略低于人工測量的精度、空中飛行安全性低等缺點。
二、無人機在項目外業中的應用
1、測區概況
測區位于四川省達州市某個鄉鎮上,測區山勢險峻,地形比較復雜,部分地區高差大約400米,綠色植被覆蓋率較高。如果用傳統的測繪方式來進行作業,那么不僅測繪的效率低、人工消耗量大,而且成圖的精度也存在很大的問題。通過綜合比較,故選擇無人機航測來代替人工傳統測量。本次航測選用的設備如表2-1所示。
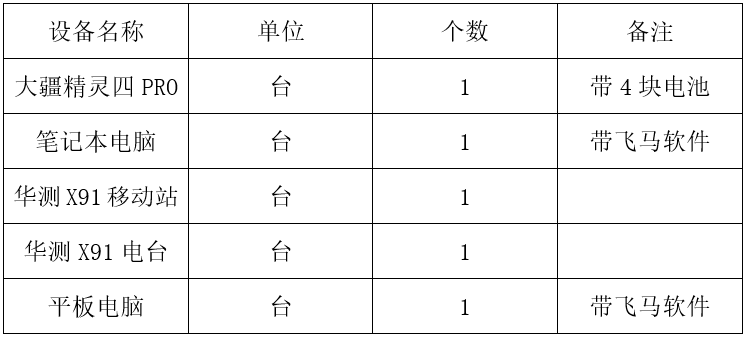
表2-1
2.無人機外業航飛作業流程
無人機航測主要包括了一下幾個作業流程:1)測區的踏勘以及資料收集、2)無人機航線的規劃和設計、3)調試飛機,調試相機參數、4)在飛馬無人機管家中正式飛行。
1)測區的踏勘以及資料收集
本次外業航測,業主方主要提供了以下資料:
1. 測量任務書
2.測區的四等GPS靜態控制測量成果
3.要求的測量的范圍邊界線
2)、無人機航線的規劃和設計
根據業主提供的資料,我們選擇在無人機管家軟件中規劃和設計無人機飛行的航線。如圖2-1所示,在飛馬無人機管家界面左上角,可以看到一個智航線的選項,點擊智航線,就能夠根據需要規劃和設計航線。
圖2-1
點擊智航線之后,新建一個工程,并以此安置點項目的名稱對這個工程文件進行命名。工程創建完成以后,根據業主提供的資料,需要將已有的測區范圍kml 導入到軟件自帶的谷歌地圖上。單擊左邊導入選項,選中測區范圍的kml文件。導入成功之后,如圖2-2所示,圖中黃線框中的陰影部分就是本次需要航測的移民安置點面積。
如圖2-2
由于大多數的測區形狀是無規律的多邊形,為了方便后期空三加密處理數據,同時也為了獲得更高精度的成果資料,因此根據移民安置點的范圍選擇合理的飛行區域形狀是非常必要的一件事情,在飛馬無人機管家軟件中,提供給用戶可供選擇的飛行區域類型有多邊形、矩形、帶狀等種類。本著為了方便后期成圖的原因,一般飛行區域我們都需要規劃成矩形或者不帶轉折的條帶。規劃好的飛行區域如圖2-3所示
圖2-3
根據已經布置好的飛行區域范圍,然后點擊航線生成選項,選擇好相對應的無人機機型,點擊確認。本次航測選用的無人機機型是大疆精靈4PRO,選擇好了對應的飛機型號,點擊確認,航線自動生成完成。特別注意,這個時候生成的航線是一個基礎航線,航線上的各個參數都會在左邊全部顯示出來,例如后期成圖比例尺、影像航片的分辨率、航線航向重疊度、航線旁向重疊度、無人機的飛行速度、本架次飛行的相對航高、本架次的飛行時間以及測區的平均海拔,如圖2-4所示。在這里可以根據具體的測量要求,調節每個架次的飛行參數。例如,最終成果需要提交1:500地形圖時,可以根據要求,適當調高航向重疊率和旁向重疊率或者降低飛行高度。這兩種方法中,在保證飛行安全的前提條件下,首先選擇降低飛行高度。
圖2-4
特別強調一下,所有的飛行參數必須在合理的范圍之內,如果出現不合理的情況,則可能發生無人機無法起飛或者撞機等事故。在本次移民安置點航測工程中,我們要求最終提交1:1000的數字地形圖成果,因此把航片分辨率設置成8cm,航向重疊度80%,旁向重疊度60%,以保證后期成圖的質量。飛行區域以及航線生成完成以后,為了提高最終的成圖精度,需要導出飛行航線,在航線的規劃下,均勻的布置像控點和加密像控點。導出航線以后,找到飛行航線KML文件,然后導入到谷歌影像地圖中。在導入飛行航線之后,接下來的步驟就是合理的布置像控點。像控點的布置遵守以下原則:
1、像控點需要選擇明顯的拐角處,以提高內業精度。
2、像控點標志尺寸大小應該在一米左右,最好布置成L形狀,測量L點的拐角處。
3、像控點應該盡量選擇地勢平坦的地方,避免樹林,房屋等容易被遮擋的地方。
4、像控點應該選擇相對保存長久的材料,比如白色的油漆或者白色的涂料。且布置像控點的地方也盡量選擇人流量小的地方。
5、像控點應該均勻的分布在測區的四周,對精度要求高的地方,應該格外布置加密像控點。
6、像控點盡量布置在兩條相鄰航線的中間,以便增加后期空三刺點的度數。
根據以上的布置原則,我們把整個測區的像控點布置成為如圖2-5所示,其中1、3、4、5這四個點分布在測區的四周,屬于基礎像控點,6號點位于測區的正中間,屬于加密像控點。這些像控點的布設完成以后,就可以利用華測X91移動站依次把每個像控點數據采集下來,并且做成標準的像控表格。
圖2-5
3)調試飛機,調試相機參數
完成上述的像控采集工作后,就可以在測區的附近選擇一個最近的起飛點。起飛點選擇要求地勢平坦,四周開闊,沒有過多的遮擋且距離第一個拍照點200米以內。滿足上述要求的起飛點才可以在第一個拍照點正常的啟動拍照命令,否則會出現掉照片的情況。起飛點選擇好以后,然后安裝好大疆精靈4PRO的旋翼以及電池,進行飛行前的常規工作檢查,保證不會出現人為的機械故障。檢查完畢以后,最好進行一次手動操作的試飛。進行手動試飛的目的是調節相機的感光度和光圈,保證航片質量最佳。經過多次的綜合測試,晴天的光圈建議選擇5~7這個參數范圍,ISO值選擇200,陰天的的光圈建議選擇2~4這個參數范圍,ISO值選擇400,這樣的參數拍出的航片質量最好。
4)在飛馬無人機管家中正式飛行
完成試飛之后,可以開始在軟件中正常飛行,巡航。首先無人機垂直上升,然后到達計算好的高度以后,水平飛行,向第一個拍照點前進。在到達第一個拍照點之后,開始調整姿態,沿著布置好的航線進行水平巡航工作。每個架次的飛行完成后,會得到若干張帶像控點的航片,如圖2-6所示。這個環節中飛馬軟件會全程監控無人機飛行的整體情況,監控的范圍包括電池的剩余電量、實時圖傳、飛行高度、飛行速度等,并且全程會有語音提示。無人機從垂直起飛到水平巡航,再到最后的返航,整個過程在飛馬軟件中基本實現了全自動化。
圖2-6
三、無人機航片在項目內業中的成圖
外業航測完成之后,獲得了一個架次的若干張航片,根據需求進行內業空三計算。我們把一個架次的航片,導入到GODWORK軟件中,進行空三內業處理,具體的空三步驟如下:
1、對導入的航片進行一鍵空三操作,進行影像的識別、匹配。
2、影像匹配完成以后,我們需要對影像進行DEM構圖。
3、構圖完成之后,再導入像控點,依次對像控點進行刺點。
4、完成兩個或者三個刺點工作之后,對整個構圖網進行平差。如果平差之后構圖網沒有破壞,繼續重復步驟3中的刺點工作。
5、所有的像控點刺點完成,平差合格之后,輸出測圖模式。
輸出了測圖模式,然后把測圖模式輸出的成果導入到生成立體相對的軟件中,生成立體像對,然后對每個像控點進行依次檢查,校核,并且輸出相對成果。最后利用已經生成的相對,繪制出1:1000的數字地形圖。輸出的成果如圖3-1所示。
圖3-1
四、成果分析
經過外業航測和內業成圖,最終得到了移民安置點1:1000的地形圖成果。同時我們對這個區域的成果進行了外業調繪,調繪的對象主要以房屋、電桿,道路以及特征點為主。經數據對比對比發現,大疆精靈四PRO基于飛馬無人機管家APP航測得到的最終成果圖滿足1:1000數字地形區的要求。
五、總結
通過本項目的實踐,可以看出大疆精靈四PRO在飛馬無人機管家軟件中能夠順利的完成航測任務,同時最終的成果資料也能夠滿足業主提出的1:1000地形圖的精度要求。在整個航測的過程中,對于飛馬無人機管家軟件有了一個深入的了解,現將飛馬無人機管家軟件的優點總結一下:
1.飛馬無人機管家軟件中嵌入了谷歌高程模型。這一點對于航測來說,非常的方便,同時也相當的重要。在任意的一個地方,無人機飛行器通過本身內置的GPS定位,再通過飛馬無人機軟件獲得一個比較準確的高程,因為飛馬軟件中嵌入了谷歌高程模型,故可以通過定位和獲取的高程來觀察周圍的地形和環境,然后計算出合適的相對飛行高度,也避免了無人機撞山的危險。
2.飛馬無人機管家軟件中具有導入和導出KML功能。導入KML功能,可以直觀的看出測區的范圍,形狀,狀況等,然后根據導入的KML范圍,選擇一個規則的飛行區域。當在無人機管家中規劃好了全部航線,然后就離不開導出KML功能,把規劃好的航線以KML的形式導出,然后在導入到谷歌影像中,這樣可以更加的方便布置像控點。在谷歌影像中,可以清晰的,均勻的布置好每一個像控點。
3.飛馬無人機管家APP具有的智能化的設計。飛馬無人機APP在整個航測過程中一直都處于核心的位置,其實有很多的智能的小細節做的特別好。大疆精靈4PRO在很多軟件中最大的速度10M/S,但是在飛馬軟件中,最大的速度可以到達15M/S,這一點很多程度上提高了航測的效率。當剩余電量不足30%的時候,飛馬無人機軟件會自動報警,然后開始強制返航,這一點也是設計的特別好,為用戶的無人機安全著想。還有飛馬無人機管家會主動為用戶加載禁飛區、限飛區,為用戶減少不必要的麻煩,飛馬無人機管家還會提示高空的風力情況。這些一個個智能化的小細節為我們用戶每一次的安全飛行保駕護航。
-
gps
+關注
關注
22文章
2981瀏覽量
169141 -
無人機
+關注
關注
231文章
10815瀏覽量
186505 -
大疆精靈
+關注
關注
0文章
3瀏覽量
2119
原文標題:基于大疆精靈4 PRO與飛馬無人機管家APP的航測初探
文章出處:【微信號:feimarobotics2015,微信公眾號:飛馬機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
低空物流:無人機開啟未來配送新篇章
愛普生M-G370PDS慣性測量單元在無人機導航中的應用

石英晶振在無人機領域的應用

無人機巡檢系統守護未來的空中衛士
《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
科達嘉電感在無人機系統中的應用
晶體晶振在無人機上的應用
舵機在無人機中的作用
MOS 管在無人機電池中的關鍵應用

半導體制冷模組賦能無人機巢:無人機效能 “熱”?點突破

開源項目!DIY了一臺無人機,用全志T113芯片

無人機光伏巡檢較傳統人工巡檢的優勢
光伏無人機自動巡檢系統的優勢價值
知語科技無人機反制系統的應用與挑戰





 工商網監
工商網監
評論