 自動駕駛基礎 慣性測量單元(IMU)
自動駕駛基礎 慣性測量單元(IMU)

現在隨著陀螺儀的發展,技術越來越成熟,陀螺儀的結構和原理都有著很大的變化。由于設備對偏轉度的要求越來越精準,已經出現了高精度陀螺儀這一概念,完全不局限在傳統的機械陀螺儀當中。所以,對于陀螺儀的分類,除了上述按照陀螺儀的發展階段以及技術特點的分類外,還可以按照陀螺儀的精度性能來分類。
陀螺漂移是陀螺儀性能高低的主要表征。陀螺漂移是由于制造上的缺陷及干擾產生的偏離穩定的輸出,用度/小時表示。按照精度性能,陀螺儀可分為以下三類:
1. 高精度陀螺(慣性級)
陀螺漂移率優于0.001度/小時(1σ),主要用于洲際導彈、核潛艇、遠程運載火箭、戰略轟炸機等戰略武器。
2. 中精度陀螺(導航級)
陀螺漂移率優于0.01度/小時(1σ),用于戰術飛機、水面艦船、先進戰車以及各類新型導彈等的導航與制導。
3. 低精度陀螺(速率級)
陀螺漂移率為0.1~1度/小時(1σ),用于工作時間較短的、精度要求相對較低的慣性系統,如各類戰術武器、各種穩瞄平臺、無人運載器、飛機航姿系統等。
以漂移率優于0.01度/小時(1σ)的導航級陀螺為例,它能使用戶獲得大約1海里/小時的位置精度和1毫弧度的方位精度。而漂移優于0.01度/小時的概念是,它必須能測量1/1000的地球自轉角速率(地球自轉角速率為15.0411度/小時)。這意味著,這種儀表應能測量相當于每3年(幾乎1000天)旋轉1圈的物體的旋轉角速度。如果是在捷聯式慣性導航系統的機械編排下,它還必須能測量運載體全部的旋轉角速率,這個角速率可能是3000度/秒(約107度/小時)或更高。因而,導航級陀螺必須具有10-2~107度/小時的動態范圍,跨度約為9個數量級。大多數導航系統還要求這種測量非常頻繁地進行,為100~200次/秒。如此苛刻的要求就是陀螺儀表如此復雜和昂貴的原因。
下面就來介紹一下,近年來成功開發的高精度陀螺儀。
一.靜電陀螺儀
雖然傳統的機械陀螺儀已經滿足不了用戶、或是場景變換上的精度需求了,但并不意味著包含轉子結構的陀螺儀已經完全退出了高精度陀螺儀隊伍當中。其身為機械陀螺儀的升級版本,靜電陀螺儀利用電場克服了轉子旋轉的摩擦力,大大提高了陀螺儀的精度。可惜生產難度較大,限制了其大規模的應用。
二.壓電陀螺儀
對于經常接觸傳感器的人都會知道,在需要完成測壓力這一任務的時候,我們基本會采用壓電傳感器。但對壓電陀螺儀并不清楚,壓電陀螺儀是一種振動陀螺,依靠壓電材料的壓電效應,當角速度不同時,貼在不同方向上的壓電薄片的電壓也出現偏差,依此測量角速度。作為高精度陀螺儀,壓電陀螺儀的抗干擾能力也十分強大,甚至經受的動態核爆實驗也沒有損壞,因此多用在軍工方面。
三. 光纖陀螺儀
光纖陀螺儀可謂順應著時代的陀螺儀潮流而誕生,其具有精度高,體積小等特點,而且在成本方面也非常低,占據著絕大的地位,幾乎完美。該種類的高精度陀螺儀利用的是光在轉動光纖線圈內光程隨角速度大小的變化,利用干涉來顯現出來。目前光纖陀螺儀由于精度和價格的原因,往往在使用者的首選名單之中。
說到微機械陀螺儀,很多人認為是低成本低精度要求的產品,因為MEMS陀螺儀的產生和發展,才使的這一技術應用到對成本特別敏感的智能手機等移動設備中,并促進了慣性導航技術的發展。
單軸和雙軸MEMS角速度傳感器(陀螺傳感器)產品主要用于游戲機、輸入設備、導航儀、PND(Portable Navigation Device)及數碼相機等。單軸產品可檢測偏擺方向。雙軸產品備有可檢測俯仰方向及滾轉方向的品種,以及可檢測俯仰方向及偏擺方向的品種。可檢測的角速度因品種而異,最大為30~6000度/秒。輸出為模擬信號。各產品備有對各軸信號進行1倍(無放大)輸出和放大至4倍的兩個端口。降低了溫度誤差以及隨時間變化的誤差。零點溫度漂移為0.05度/秒/℃。噪聲方面,可檢測的角速度為最大30度/秒的品種控制在了0.014度/秒/√Hz。
但是實際上,MEMS陀螺儀經過系統級校準,也是可以做成高精度的產品的,并在逐步替代光纖陀螺儀。
高精度陀螺儀是隨著科技的發展,時代的需要下的產物,只有技術的不斷完善,或是有新的研發,這才是時代的潮流。
下面是常見的陀螺儀性能指標與解釋
零偏
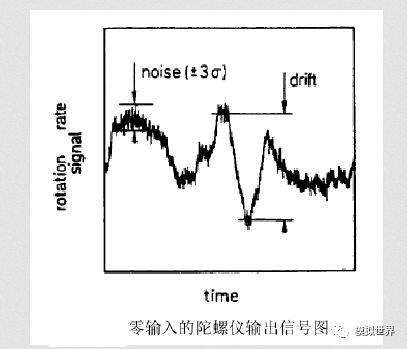
零偏,又稱為零位漂移或零位偏移或零偏穩定性,也可簡稱零漂或漂移率,英文中稱為drift 或bias drift。零偏應理解為陀螺儀的輸出信號圍繞其均值的起伏或波動,習慣上用標準差(σ)或均方根(RMS )表示,一般折算為等效輸入角速率(°/ h) 。在角速度輸入為零時,陀螺儀的輸出是一條復合白噪聲信號緩慢變化的曲線,曲線的峰-峰值就是零偏值(drift ),如下圖所示。在整個性能指標集中,零偏是評價陀螺儀性能優劣的最重要指標。
分辨率
陀螺儀中的分辨率是用白噪聲定義的,如圖2-6 中所示,可以用角隨機游走來表示,可以簡化為一定帶寬下測得的零偏穩定性與監測帶寬的平方根之比,其單位為 °??1 °。角度隨機游走表征了長時間累積的角度誤差。角隨機游動系數反映了陀螺在此處鍵入公式。的研制水平,也反映了陀螺可檢測的最小角速率能力,并間接反映了與光子、電子的散粒噪聲效應所限定的檢測極限的距離。據此可推算出采用現有方案和元器件構成的陀螺是否還有提高性能的潛力。
標度因子
標度因子是陀螺儀輸出量與輸入角速率變化的比值,通常用某一特定的直線斜率表示,該斜率是根據整個正(或負) 輸入角速率范圍內測得的輸入/輸出數據,通過最小二乘法擬合求出的直線斜率。對應于正輸入和負輸入有不同的刻度因子稱為刻度因子不對稱,其表明輸入輸出之間的斜率關系在零輸入點不連續。一般用刻度因子穩定性來衡量刻度因子存在的誤差特性,它是指陀螺在不同輸入角速率情況下能夠通過標稱刻度因子獲得精確輸出的能力。非線性往往與刻度因子相關,是指由實際輸入輸出關系確定的實際刻度因子與標稱刻度因子相比存在的非線性特征,有時還會采用線性度,其指陀螺輸入輸出曲線與標稱直線的偏離程度,通常以滿量程輸出的百分比表示。
動態范圍
陀螺在正、反方向能檢測到的輸入角速率的最大值表示了陀螺的測量范圍。該最大值除以閥值即為陀螺的動態范圍,該值越大表示陀螺敏感速率的能力越強。
帶寬
帶寬是指陀螺能夠精確測量輸入角速度的頻率范圍,這個頻段范圍越大表明陀螺的動態響應能力越強。對于開環模式工作的陀螺,帶寬定義為響應相位從0到滯后90度對應的頻段,也可等同定義為振幅響應比為0.5 即3dB 點對應的頻段。對于閉環模式工作的陀螺,帶寬定義為控制及解調電路的帶寬,一般指解調電路中使用的低通濾波器的截至頻率。電路帶寬實際上是反映該電路對輸入信號的響應速度,帶寬越寬,響應速度越快,允許通過的信號頻率越高,若頻率為某一值的正弦波信號通過電路時其能量被消耗一半,則這個頻率便是此電路的帶寬。
-
光纖
+關注
關注
20文章
4147瀏覽量
75251 -
陀螺儀
+關注
關注
44文章
848瀏覽量
100037 -
自動駕駛
+關注
關注
790文章
14321瀏覽量
170693
原文標題:自動駕駛基礎(六十四) -- -慣性測量單元(IMU)十
文章出處:【微信號:Analog_World,微信公眾號:模擬世界】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛汽車在隧道、山區如何精準定位?

自動駕駛汽車是如何準確定位的?

Bosch Sensortec最新推出BMI330慣性測量單元
新能源車軟件單元測試深度解析:自動駕駛系統視角
愛普生慣性測量單元M-G370PDF可廣泛用于各工業領域

慣性測量單元的作用和組成
愛普生慣性測量單元的工作原理
EPSON慣性測量單元M-G370PDF用于管道機器人巡檢
愛普生M-G366PDG適用于商用車自動駕駛領域

愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應用領域選型介紹

AGV慣導應用之無人牽引車慣性測量單元IMU






 工商網監
工商網監
評論