 HYCAN廣汽蔚來定義下一代數字座艙
HYCAN廣汽蔚來定義下一代數字座艙

本文是在北京舉辦的第六屆國際智能網聯汽車技術年會朱賽春老師《如何定義下一代數字座艙》的發言稿。
大家下午好!
我們知道數字座艙是用戶價值創造、互聯網應用生態及基礎設施和智能硬件汽車產品落地的關鍵。很高興大會的邀請,和大家分享廣汽蔚來在面向智能駕駛、互聯網生態和基礎設施智能硬件生態建設中的數字座艙開發的一些思考。主要分享點有數字座艙產品特征挖掘、數字座艙HMI需求開發及數字座艙開發的若干關鍵問題。
智能汽車的產品特征
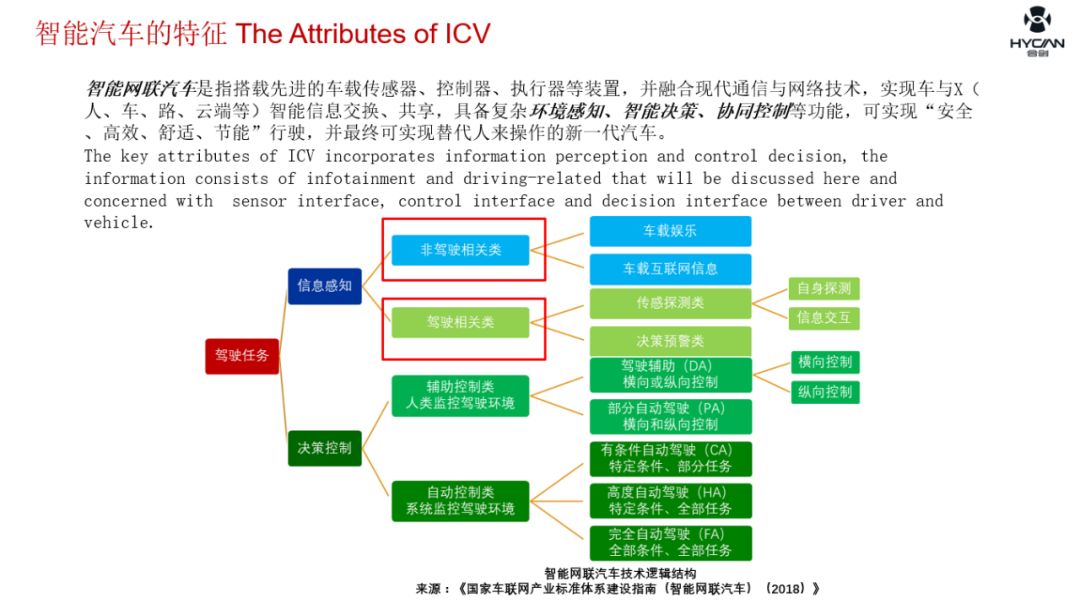
汽車工業正在從機械制造、電氣化到數字化智能化轉變。智能汽車是指搭載先進的車載傳感器、控制器、執行器等裝置,并融合現代通信與網絡技術,實現車與人、車、路、云端等智能信息交換、共享,具備復雜環境感知、智能決策、協同控制等功能,可實現“安全、高效、舒適、節能”行駛,并最終可實現替代人來操作的新一代汽車。數字座艙的重要任務之一是完成駕駛任務的信息感知。這里的信息感知分為,包括信息娛樂和互聯網信息的非駕駛類相關信息;另一類是駕駛類相關的信息,包括環境感知探測和決策預警,這其中按技術手段又分為自身探測和信息交互,這也是我們所說的自能駕駛的兩條技術路線:自主自動駕駛和車路協同駕駛,這都離不開ICT技術。
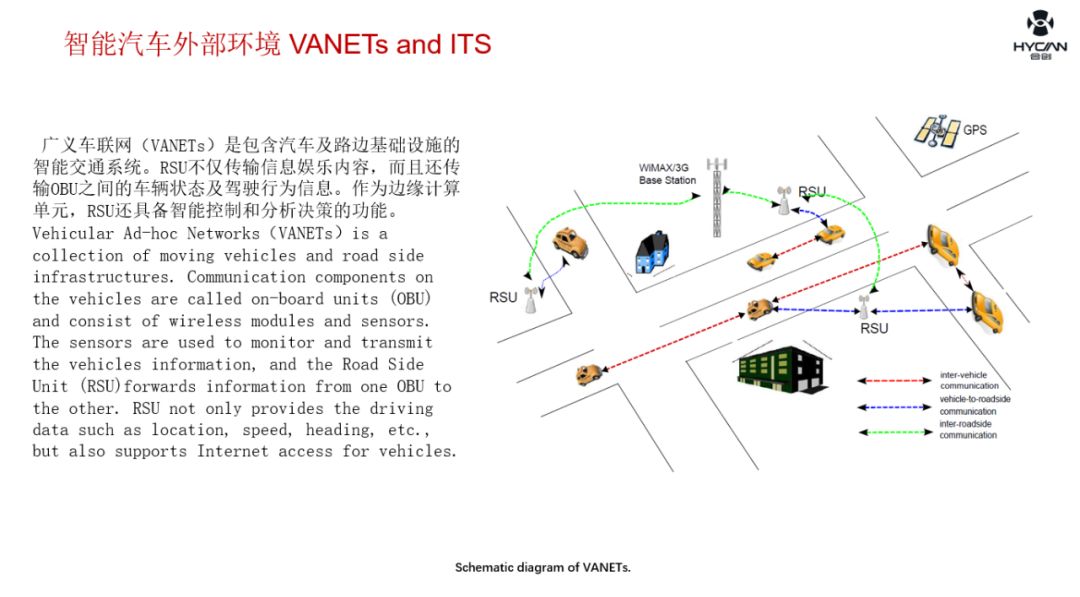
我們在挖掘智能汽車產品屬性的時候,除了要考慮人機交互,還要必須考慮車外部環境,即必須把汽車納入到整個智能交通系統中綜合考慮。我們知道自動駕駛技術的研究從幾十年前就開始了,阻礙自動駕駛實際應用的主要因素除了技術實現的可能性與可靠性之外,最重要的因素就是道路交通系統的容納性與安全性,人和社會的需要程度與可接受程度。數字座艙是一種媒介,我們研究方向是怎樣通過這種媒介能做到駕駛員和自動駕駛系統(信息系統)的有機融合,自動駕駛車輛與交通系統的有機融合。所以我們研究的不僅是人機交互HMI,更多的還有MMI,放在大的技術生態背景里就是IOT或IOX的萬物互聯。廣義車聯網VANETs(Vehicular Ad-hoc Networks)是包含汽車及路邊基礎設施(RSU)的智能交通系統。RSU不僅傳輸信息娛樂內容,而且還傳輸OBU之間的車輛狀態及駕駛行為信息。作為邊緣計算單元,RSU還應具備智能控制和分析決策的功能。所以,RSU的標準規范制定及基礎平臺架構設計是未來ITS及智能汽車重要研究方向。
智能汽車需求開發
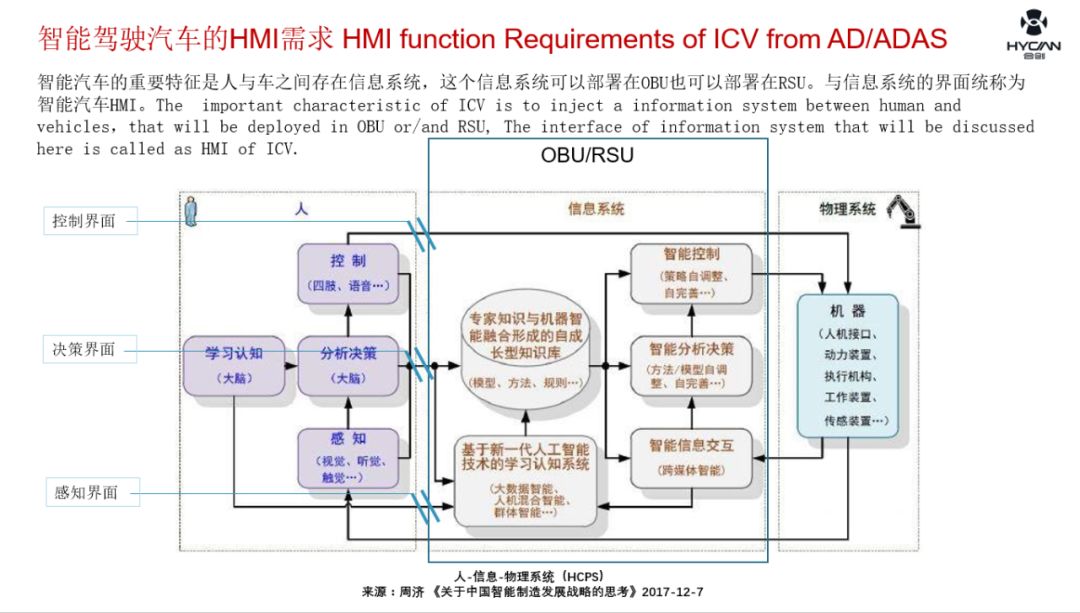
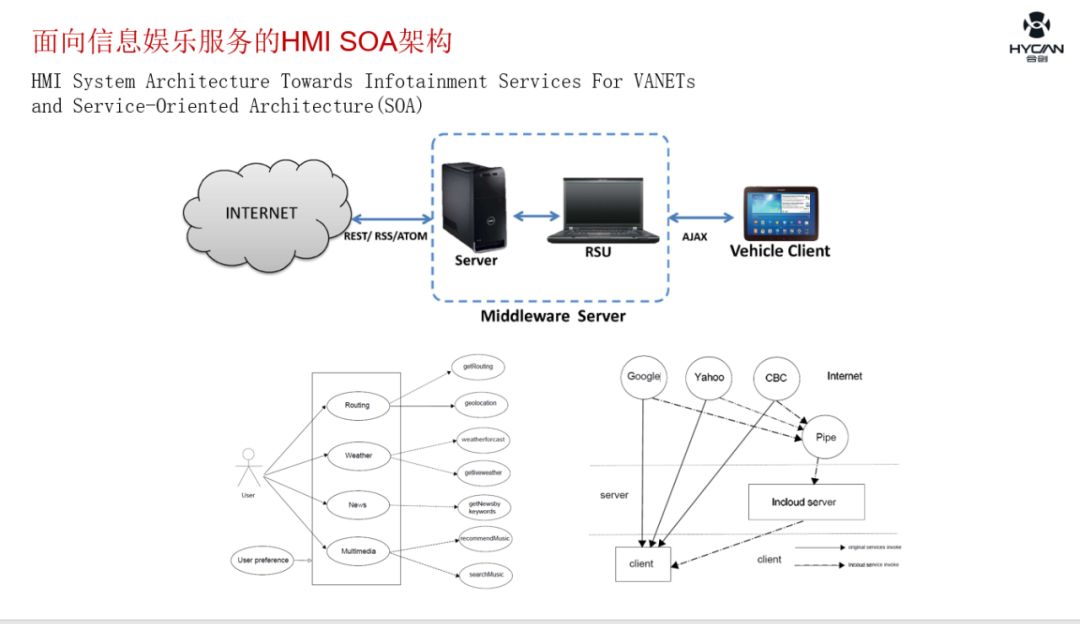
智能汽車的重要特征是人與車之間的信息系統。信息系統的核心是基于新一代大數據智能、人機混合智能技術的機器學習認知系統,基于此系統可以構建專家知識與機器智能融合的自成長融合數據庫。這里包含MPC算法模型和深度學習算法等。與此信息系統的交互界面統稱為智能汽車HMI開發范疇,這不僅包含跨媒體智能的智能信息交互,而且智能分析決策及策略自調整自學習自完善的智能控制也屬于智能汽車HMI研究的重要組成部分。這個信息系統可以部署在OBU也可以部署在RSU。在后面的信息系統的面向服務的SOA架構模型中,我們將重點講述信息系統部署在RSU的好處。
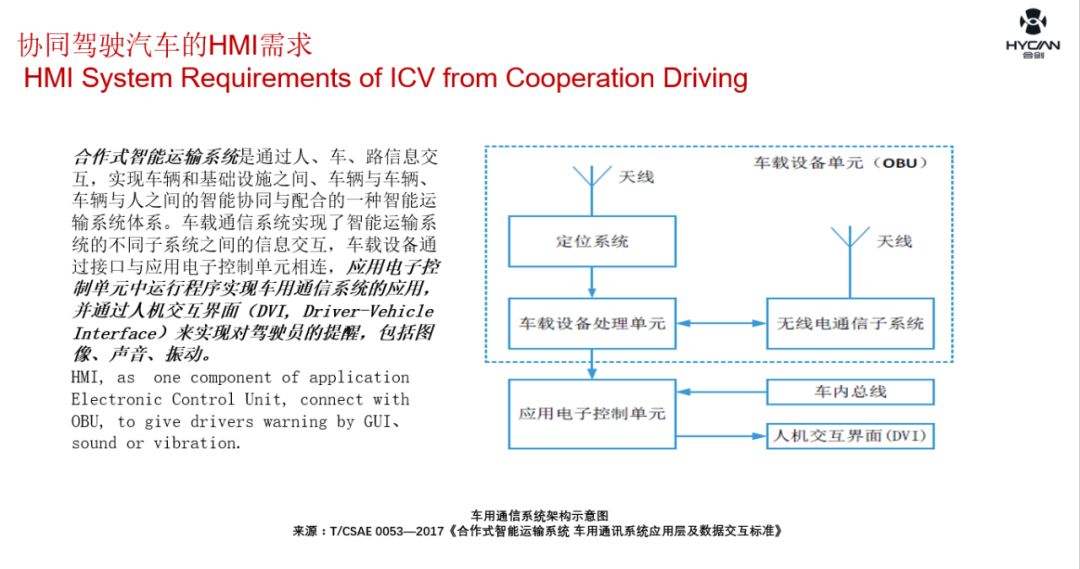
剛才講過,智能駕駛的兩條技術路線-自主自動駕駛和合作協同自動駕駛,我們預判這兩種技術路線將會融合。合作式智能運輸系統是通過人、車、路信息交互,實現車輛和基礎設施之間、車輛與車輛、車輛與人之間的智能協同與配合的一種智能運輸系統體系。車載通信系統實現了智能運輸系統的不同子系統之間的信息交互,車載設備通過接口與應用電子控制單元相連,應用電子控制單元中運行程序實現車用通信系統的應用,并通過人機交互界面(DVI, Driver-Vehicle Interface)來實現對駕駛員的提醒,包括圖像、聲音、振動。
數字座艙開發的關鍵問題
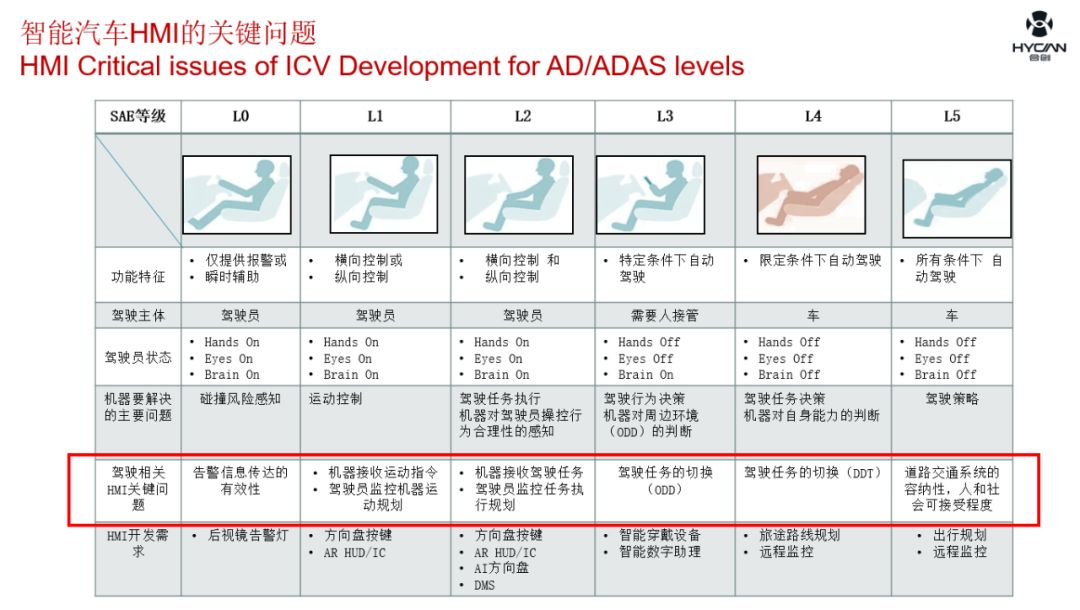
面向智能駕駛的數字座艙開發,遵循SAE J3016?《道路機動車自動駕駛系統相關術語分類和定義》中的自動駕駛自動化等級模型。在L0到L5不同等級中,我們識別出機器要解決的主要問題及相應的人機交互需要解決的問題。在L0開發中,碰撞告警等信息的感知及傳達是關鍵問題。注意這里強調的是傳達。涉及到信息過濾和信息的自適應技術。在目前不管是應用傳感器還是基于V2X技術的ADAS系統,一個主要問題是大量無效的預警信息干擾駕駛員的正常駕駛行為,駕駛員在需要的時刻獲得必要的信息是衡量信息傳達有效性的重要指標。在L2開發中,強調是機器對駕駛任務的執行及機器對駕駛員的駕駛指令的合理性的感知判斷,即機器對駕駛員非預期性的危險性的駕駛行為的預判。這是我們在主動安全領域研究的重點,我們知道目前的自動駕駛系統的認知體系框架只是場景的感知,遠遠達不到情景的認知上。因此目前的自動駕駛系統不能徹底解決交通安全性問題。我們通過人因分析及通過大數據機器學習等手段,把數字座艙的設計納入到交通系統中做有機的整體考慮。在L3開發中,機器對周邊環境感知和駕駛行為決策能力(ODD)是我們研究的重點。這一階段HMI研究的關鍵是駕駛任務的人機切換的問題,針對V Failure、ADS Failure及ODD Exit等場景,我們研究自動駕駛的形成、脫離過程,包括自動和手動駕駛切換,如何安全順利的解決人與自動控制系統的角色轉換。從中我們采用了大量人因工程的方法。在L4的開發中,更為強調的是機器對自身能力的感知及駕駛任務機器決策的能力。更加聰明的車機能夠“量力而行”。在L5的開發中,有人說這沒有HMI什么事了,我們認為這一階段機器主要是解決駕駛策略的問題,人機界面的開發主要是解決道路交通系統的容納性,人和社會可接受程度的問題。歸納起來,這些問題都是自動駕駛車輛在實際道路交通中存在的安全性和適應性的問題。這也表明智能駕駛艙的人機交互技術是決定自動駕駛在未來普及的關鍵因素。
HYCAN和廣汽蔚來
廣汽蔚來,一家以“合創”為理念,汽車和互聯網深度融合的用戶企業,不僅提供智能純電動汽車,更為用戶提供充滿創享的生活。公司由廣汽集團、廣汽新能源、蔚來基金、蔚來汽車與創始團隊、員工共同持股的“合創”公司。主要業務聚焦在純電動汽車的研發、銷售及服務,并通過高品質、個性化的泛產品不斷豐富用戶的出行生活。2019年5月20日發布品牌“HYCAN合創”及首款概念車,預計首款量產車型于2019年底發布,2020年上半年交付用戶。
-
數字
+關注
關注
1文章
1698瀏覽量
51914 -
蔚來汽車
+關注
關注
1文章
648瀏覽量
20919
原文標題:HYCAN廣汽蔚來 | 如何定義下一代數字座艙
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
下一代PX5 RTOS具有哪些優勢
是德科技助力蔚來驗證新一代汽車無線系統
英特爾與面壁智能宣布建立戰略合作伙伴關系,共同研發端側原生智能座艙,定義下一代車載AI

Imagination與瑞薩攜手,重新定義GPU在下一代汽車中的角色

廣汽集團旗下廣汽荻原數字化新工廠開工
廣汽ADiGO SENSE端云一體大模型與DeepSeek-R1大模型完成深度融合
Garmin佳明和天馬推出新一代數字座艙解決方案
Garmin佳明和高通推出新一代數字座艙解決方案
加碼AI+智能座艙!艾拉比成立新品牌,艾博連如何賦能下一代智能座艙






 工商網監
工商網監
評論