") 自動(dòng)駕駛模擬仿真系統(tǒng)中的傳感器模型
自動(dòng)駕駛模擬仿真系統(tǒng)中的傳感器模型

攝像頭
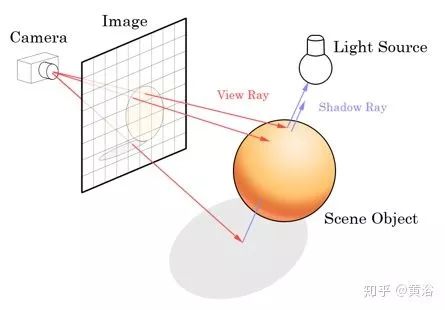
攝像頭仿真就是生成圖像,逼真的圖像,通過(guò)計(jì)算機(jī)圖形學(xué)對(duì)三維景物(CAD)模型添加顏色與光學(xué)屬性。現(xiàn)在流行的Unreal Engine或者Unity 3D,就是基于物理的渲染引擎,實(shí)現(xiàn)一些CAD模型的繪制算法,比如光線(xiàn)跟蹤(ray tracing)或者光線(xiàn)投射(ray casting),來(lái)實(shí)現(xiàn)圖像合成(如圖展示光線(xiàn)和圖像的關(guān)系)。一些開(kāi)源的自動(dòng)駕駛仿真系統(tǒng)比如Intel Carla(Car Learning to Act)和Microsoft AirSim都采用了這些渲染引擎。
有一些開(kāi)源的虛擬圖像庫(kù),已經(jīng)在計(jì)算機(jī)視覺(jué)的研究中得到應(yīng)用,比如Virtual KITTI,F(xiàn)CAV (UM Ford Center for Autonomous Vehicles)和Synthia等,下面圖有一些各自的圖像例子。
理論上,在計(jì)算機(jī)圖形學(xué)有各種光照模型和繪制模型,當(dāng)年Nvidia在GPU硬件對(duì)圖形學(xué)算法加速做出了重大貢獻(xiàn),包括著名的voxel shader和pixel shader(fragment shader)。大家說(shuō)計(jì)算機(jī)視覺(jué)是計(jì)算機(jī)圖形學(xué)的逆過(guò)程,只是它和計(jì)算機(jī)圖形學(xué)也可以結(jié)合,結(jié)果有兩個(gè)重要輸出,一個(gè)是增強(qiáng)現(xiàn)實(shí)(AR),另一個(gè)是基于圖像的繪制(IBR)。
AR的思想在仿真系統(tǒng)也可以體現(xiàn),比如在真實(shí)的街景中可以插入合成的車(chē)輛或者行人。IBR在虛擬環(huán)境生成的過(guò)程中可以通過(guò)一些拍攝的圖像生成一些背景以簡(jiǎn)化實(shí)際渲染的計(jì)算量。更甚至,通過(guò)機(jī)器學(xué)習(xí),比如GAN,在大量真實(shí)圖像數(shù)據(jù)的訓(xùn)練情況下,和圖形學(xué)的CAD模型結(jié)合,也可以合成新場(chǎng)景圖像。
除了3-D幾何和物理模型之外,還需要對(duì)相機(jī)鏡頭的結(jié)構(gòu)與光學(xué)特性,內(nèi)部數(shù)據(jù)采集過(guò)程進(jìn)行仿真,例如焦距,畸變,亮度調(diào)節(jié),伽瑪調(diào)節(jié),景深(depth of field),白平衡,高動(dòng)態(tài)范圍(HDR)色調(diào)調(diào)整等。
激光雷達(dá)
介紹一篇模擬激光雷達(dá)的論文。首先,采用非常流行的游戲GTA-V(Grand Theft Auto V)獲取模擬的點(diǎn)云和高保真圖像。
為了模擬真實(shí)的駕駛場(chǎng)景,在游戲中使用自主車(chē)(ego vehicle),安裝有虛擬激光雷達(dá),并通過(guò)AI接口在虛擬世界中進(jìn)行自動(dòng)駕駛。系統(tǒng)同時(shí)收集激光雷達(dá)點(diǎn)云并捕捉游戲圖像。在虛擬環(huán)境中,虛擬攝像頭和虛擬激光雷達(dá)放在同一個(gè)位置。這樣做有兩個(gè)優(yōu)點(diǎn):
可以輕松地對(duì)收集的數(shù)據(jù)進(jìn)行健全性檢查(sanity check),因?yàn)辄c(diǎn)云和相應(yīng)的圖像必須保持一致;
游戲的虛擬攝像頭和虛擬激光雷達(dá)之間的標(biāo)定可以自動(dòng)完成,然后收集的點(diǎn)云和場(chǎng)景圖像可以組合在一起作為傳感器融合任務(wù)的神經(jīng)網(wǎng)絡(luò)訓(xùn)練數(shù)據(jù)集。
光線(xiàn)投射(ray tracing)用于模擬虛擬激光雷達(dá)發(fā)射的每個(gè)激光射線(xiàn)。光線(xiàn)投射將光線(xiàn)起點(diǎn)和終點(diǎn)的3D坐標(biāo)作為輸入,并返回該光線(xiàn)命中的第一個(gè)點(diǎn)3D坐標(biāo),該點(diǎn)將用于計(jì)算點(diǎn)的距離。激光雷達(dá)參數(shù)包括垂直視場(chǎng)(VFOV),垂直分辨率,水平視場(chǎng)(HFOV),水平分辨率,俯仰角,激光射線(xiàn)的最大范圍和掃描頻率。
如下圖顯示了一些可配置的參數(shù):(a)虛擬激光雷達(dá)前向圖的正視圖:黑色虛線(xiàn)是水平線(xiàn),α是垂直視場(chǎng)(FOV),θ是垂直分辨率,σ是俯仰角; (b)表示虛擬激光雷達(dá)的俯視圖,β是水平FOV,φ是水平分辨率。
該系統(tǒng)實(shí)現(xiàn)3-D激光雷達(dá)點(diǎn)云和攝像頭圖像的自動(dòng)校準(zhǔn),而且用戶(hù)可以選擇所需的游戲場(chǎng)景,并指定和改變游戲場(chǎng)景的8個(gè)維度:汽車(chē)模型,位置,方向,數(shù)量,背景,顏色,天氣和時(shí)間。前5個(gè)維度同時(shí)影響激光雷達(dá)點(diǎn)云和游戲圖像,而后3個(gè)維度僅影響游戲圖像。
介紹一篇基于機(jī)器學(xué)習(xí)模擬雷達(dá)的論文工作。由于多徑反射,干涉,反射表面,離散單元和衰減等影響,雷達(dá)建模不簡(jiǎn)單。詳細(xì)基于物理原理的雷達(dá)模擬是有的,但對(duì)實(shí)際場(chǎng)景而言計(jì)算量難以承受。
一種構(gòu)建概率隨機(jī)汽車(chē)?yán)走_(dá)模型的方法基于深度學(xué)習(xí)和GAN,產(chǎn)生的模型體現(xiàn)了基本的雷達(dá)效應(yīng),同時(shí)保持實(shí)時(shí)計(jì)算的速度。采用深度神經(jīng)網(wǎng)絡(luò)作為雷達(dá)模型,從數(shù)據(jù)中學(xué)習(xí)端到端的條件概率分布。網(wǎng)絡(luò)的輸入是空間柵格和對(duì)象列表,輸出是讀取的傳感器數(shù)據(jù)。
如上圖是在深度學(xué)習(xí)框架下模擬雷達(dá)數(shù)據(jù)的表示。空間柵格是具有兩個(gè)主要尺寸,即距離和方位角的的3D張量,第3維度是由不同類(lèi)型的信息層組成。這個(gè)類(lèi)似于RGB圖像,其像素信息存儲(chǔ)在空間維度和顏色通道中。那么,這種空間柵格同樣適合CNN模型。
提供兩個(gè)直接參數(shù)化概率分布的基準(zhǔn)雷達(dá)模型:正態(tài)分布和高斯混合模型。多變量正態(tài)分布通常用于機(jī)器學(xué)習(xí),因?yàn)樗哂辛己玫臄?shù)學(xué)性能。不過(guò),正態(tài)分布是單峰的。而且正態(tài)分布的參數(shù)與目標(biāo)變量的維數(shù)呈二次方增長(zhǎng)。這里CNN模型的輸出是具有兩層的張量網(wǎng)格:一個(gè)平均值,一個(gè)對(duì)角對(duì)數(shù)方差。
隨機(jī)雷達(dá)模型的一個(gè)重要挑戰(zhàn)是,傳感器輸出是多模態(tài)和空間相關(guān)的。回歸方法將平滑可能的解決方案,導(dǎo)致模糊的預(yù)測(cè)。而變分自動(dòng)編碼器(VAE)允許學(xué)習(xí)一對(duì)多概率分布而無(wú)需明確輸出哪個(gè)分布。
該模型的架構(gòu)是一個(gè)編碼器-解碼器網(wǎng)絡(luò)。
編碼器獲取光柵和對(duì)象列表并產(chǎn)生潛在的特征表示x,解碼器采用特征表示和隨機(jī)生成的噪聲值并產(chǎn)生預(yù)測(cè)的傳感器測(cè)量值。編碼器由兩分支組成,即一個(gè)空間光柵和一個(gè)對(duì)象列表,這些分支合并在一起產(chǎn)生潛在的特征表示。兩個(gè)分支完全由卷積層組成。輸出被扁平化級(jí)聯(lián)在一起,然后使用有ReLU的全連接層處理。
解碼器使用編碼特征和隨機(jī)噪聲生成功率值的雷達(dá)極坐標(biāo)網(wǎng)格。 在VAE重新參數(shù)化時(shí)候,隨機(jī)噪聲加入輸入信號(hào)。使用ReLU激活的全連接層連接和處理噪聲和潛在特征,然后重新整形和一系列反卷積層處理,產(chǎn)生輸出雷達(dá)信號(hào)。
其他傳感器
其他傳感器,如GPS,IMU,超聲波雷達(dá)和V2X傳感器,也可以模擬仿真其數(shù)據(jù)。
GPS模擬GPS位置以及GPS噪聲模型參數(shù),輸出車(chē)的經(jīng)緯度,速度,航向等。
IMU模擬車(chē)的加速度和角速度,特別是GPS信號(hào)丟失時(shí)車(chē)的位置,速度、和航向的累積誤差。
超聲波雷達(dá)(主要是自動(dòng)泊車(chē))模擬超聲波雷達(dá)位置,角度和障礙物的距離。
V2X模擬動(dòng)態(tài)交通流設(shè)備數(shù)據(jù),甚至要反映通信延時(shí)或丟包的情況。
-
攝像頭
+關(guān)注
關(guān)注
61文章
4976瀏覽量
98327 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14312瀏覽量
170561
原文標(biāo)題:自動(dòng)駕駛模擬仿真系統(tǒng)中的傳感器模型
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車(chē)科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
康謀分享 | 基于多傳感器數(shù)據(jù)的自動(dòng)駕駛仿真確定性驗(yàn)證

自動(dòng)駕駛汽車(chē)是如何準(zhǔn)確定位的?

為什么仿真對(duì)于自動(dòng)駕駛來(lái)說(shuō)非常重要?

新能源車(chē)軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角
自動(dòng)駕駛大模型中常提的Token是個(gè)啥?對(duì)自動(dòng)駕駛有何影響?
物聯(lián)網(wǎng)中的傳感器類(lèi)型解析 傳感器類(lèi)型在自動(dòng)駕駛中的應(yīng)用
多傳感器融合在自動(dòng)駕駛中的應(yīng)用趨勢(shì)探究

一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

MEMS技術(shù)在自動(dòng)駕駛汽車(chē)中的應(yīng)用
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
康謀分享 | 自動(dòng)駕駛聯(lián)合仿真——功能模型接口FMI(四)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論