FESTO伺服氣動焊槍系統(tǒng)講解
伺服氣動焊槍系統(tǒng)支持各種現(xiàn)場總線協(xié)議。該設(shè)計的基礎(chǔ)是CPX現(xiàn)場總線節(jié)點FB35 – Profinet....
VASS KUKA電伺服焊鉗的SG_Background控制
SERVOZANGE (伺服鉗):選擇焊鉗--在列表中只顯示已激活選項 后臺流程已激活 的焊鉗。
力矩傳感器的更換及位置傳感器的拆卸(新)V1
第一步:刀頭嚙合螺絲階段(對應(yīng)step1,step2)
S7-1200填充塊指令(U)FILL_BLK使用說明
(U)FILL_BLK指令是當(dāng)EN條件滿足時,實現(xiàn)用輸入變量批量填充輸出區(qū)域的功能。
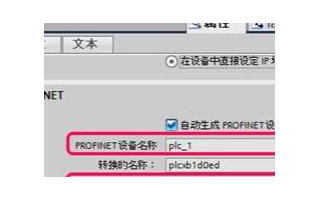
S7-300集成PN口作為Profinnet控制器使用方法
PROFINET IO的IO現(xiàn)場設(shè)備在PROFINET上有著相同的等級,在網(wǎng)絡(luò)組態(tài)時分配給一個IO控....
KUKA-大眾標(biāo)準(zhǔn)伺服焊鉗設(shè)備之USE_R的使用
在調(diào)用的USER程序中:Tech_ EZSP Zange = Nr1 Service ProgNr=....
淺析Tucker螺柱焊V1.10版
實際上,直線電機就是一個信號放大器。通過LMC控制電機動作,又通過光柵測量系統(tǒng)來檢測電機動作的距離。
S7-1500從站的激活與取消激活
通過指令“D_ACT_DP”,可根據(jù)需要取消激活和激活所組態(tài)的 DP 從站/PROFINET IO ....
S7-1200 MODBUS TCP通信多請求處理
連接 ID 和背景數(shù)據(jù)塊組合成對,對每個連接來說,組合對都是唯一的。
S7-1500系統(tǒng)內(nèi)使用ET200S 1SI模塊實現(xiàn)Modbus主站通信
打開軟件TIA PORTAL STEP7 V16,點擊項目->新建...創(chuàng)建一新項目,項目名稱為S7....
淺析KUKA數(shù)學(xué)標(biāo)準(zhǔn)功能
角度正切的定義是直角三角形的鄰邊 (X) 除以對邊 (Y)。如果兩個側(cè)邊的長度已知,則可以用反正切計....
KUKA機器人系統(tǒng)函數(shù)INVERSE()介紹
功能 INVERSE 從一個笛卡爾位置用附加軸角度計算合適的機器人軸角度。
S1200對DP從站一致性數(shù)據(jù)讀寫
CPU 為所有基本數(shù)據(jù)類型(如Word 或 DWord)和所有系統(tǒng)定義的結(jié)構(gòu)(例如 IEC_TIME....
PROFIBUS DP主從配置方法步驟說明
從硬件目錄/ 分布式I/O 中將ET200S拖入網(wǎng)絡(luò)視圖,鼠標(biāo)拖動從站通信接口到主站接口, 釋放鼠標(biāo)....
S7-1200與S7-1200/S7-1500不同項目下UDP通信
S7-1200 與 S7-1200 之間的以太網(wǎng)通信可以通過 UDP 協(xié)議來實現(xiàn)。本列中使用TSEN....
ALBANY卷簾門的調(diào)試心得V1版
預(yù)運行光電元件在距離底部型材下方約 100 mm (3.94”) 處運行(取決于門型)。該元件會在門....
ALBANY卷簾門的調(diào)試心得V1版分享
磁性開關(guān)沿著連接器和夾持器安裝在側(cè)架里里面,以進行高度調(diào)整。提供有相關(guān)的電纜和連接器。
BUFF傳送連的使用調(diào)試V1版步驟簡析
當(dāng)小車通過通行檢測傳感器以及上件積放停止器上無小車時,傳感器會將反饋給PLC ,PLC會給出一個可以....
BOLLHOFF博爾豪夫液壓鉚鉗的注意事項有哪些
1號油管的進槍是通過12KYH7比例閥和12KYH3得電,P與B相通。進槍時3號油管相通,12KYH....
KUKA機器人將參數(shù)傳遞到子程序的步驟
建議:始終將一個參數(shù)傳遞到相同數(shù)據(jù)類型的變量中。可以將參數(shù)傳遞到另一個數(shù)據(jù)類型中,但是有特定的限制。
機器人讀取系統(tǒng)時鐘并按照十進制顯示
下列程序中,DB1.DBB0~DB1.DBB8分別對應(yīng)需要顯示的十進制表示的:年/月/日/時/分/秒....
KUKA機器人C4外部自動控制最終版介紹
如果機器人程序要由上級控制器(例如PLC)集中控制,則可以使用”自動外部”界面來執(zhí)行。
KUKA機器人C4外部自動控制最終版-v1介紹
上級控制器通過自動外部接口將用于機器人過程的信號(例如運動使能,故障確認(rèn),程序啟動等)傳輸?shù)綑C器人控....
分享一下ALBANY卷簾門的調(diào)試心得
磁性開關(guān)沿著連接器和夾持器安裝在側(cè)架里里面,以進行高度調(diào)整。提供有相關(guān)的電纜和連接器。
由KUKA外部自動展開的PLC控制程序的分析
KRC-PLC LPTK ----------8–程序到達(dá)最后一點LPKT=14-在FOLGE程....
氣伺服焊鉗的控制分析V12版
工作電流(負(fù)載和邏輯電源).<4 A,僅當(dāng)現(xiàn)場總線節(jié)點上未連接其他模塊和閥時
怎樣去讀取DP或PN總線上各站點的狀態(tài)呢?
在用戶程序(OB1)中,使用 SFC51 "RDSYSST" 讀出 CPU 的系統(tǒng)狀態(tài)列表。
淺析拆卸KUKA機器人2軸平衡配重V1
將間隔塊置于魚眼接頭與液壓缸之間敞露的活塞桿上,為此,將橡膠波紋管往后推。
新的故障安全通信Flexible F-Link
靈活的 F-Link 通信地址簽名 – 用于更好地分類變化的離散 F 簽名
? 區(qū)分硬件/軟件和通....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)