 電子發燒友App
電子發燒友App


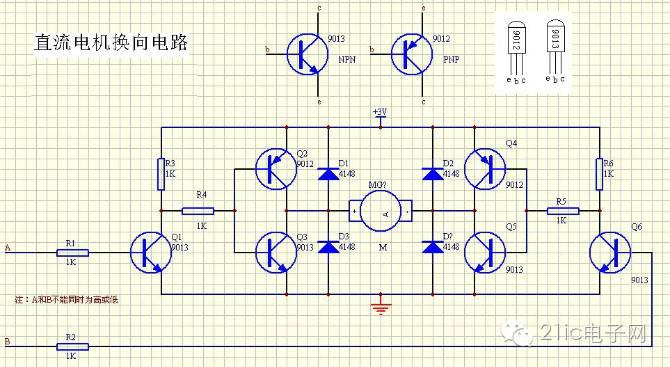
?H橋是什么?
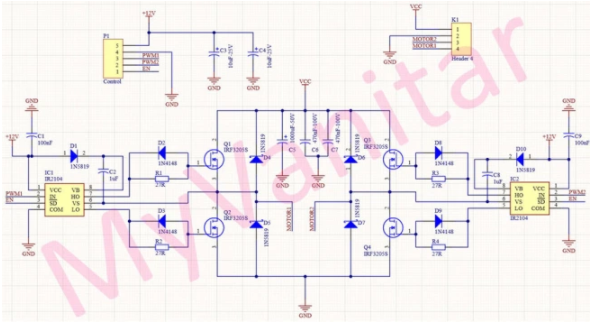
H橋是一個典型的直流電機控制電路,因為它的電路形狀酷似字母H,故得名與“H橋”。4個三極管組成H的4條垂直腿,而電機就是H中的橫杠。 長期以來,直流電機以其良好的線性特性、優異的控制性能等特點成為大多數變速運動控制和閉環位置伺服控制系統的最佳選擇。直流電機驅動控制電路分為光電隔離電路、電機驅動邏輯電路、驅動信號放大電路、電荷泵電路、H橋功率驅動電路等四部分。
直流電機驅動使用最廣泛的就是H型電路,這種驅動電路方便地實現直流電機的四象限運行,分別對應正轉、正轉制動、反轉、反轉制動,下面就和松文機電一起了解一下這種驅動的原理與設計。
直流電機H橋電路驅動原理
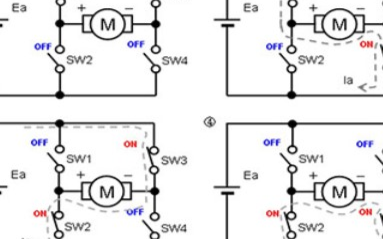
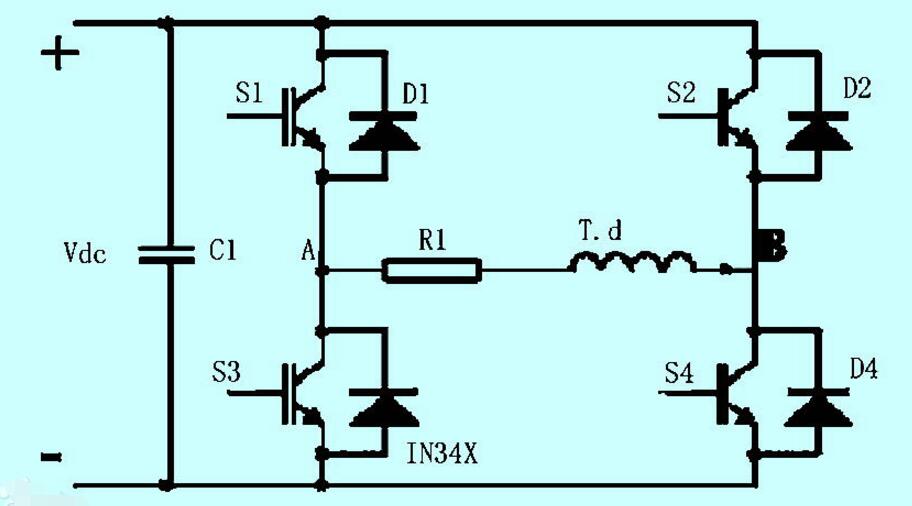
全橋式驅動電路的4只開關管都工作在斬波狀態。S1、S2為一組,S3、S4為一組,這兩組狀態互補,當一組導通時,另一組必須關斷。當S1、S2導通時,S3、S4關斷,電機兩端加正向電壓實現電機的正轉或反轉制動;當S3、S4導通時,S1、S2關斷,電機兩端為反向電壓,電機反轉或正轉制動。
實際控制中,需要不斷地使電機在四個象限之間切換,即在正轉和反轉之間切換,也就是在S1、S2導通且S3、S4關斷到S1、S2關斷且S3、S4導通這兩種狀態間轉換。這種情況理論上要求兩組控制信號完全互補,但是由于實際的開關器件都存在導通和關斷時間,絕對的互補控制邏輯會導致上下橋臂直通短路。為了避免直通短路且保證各個開關管動作的協同性和同步性,兩組控制信號理論上要求互為倒相,而實際必須相差一個足夠長的死區時間,這個校正過程既可通過硬件實現,即在上下橋臂的兩組控制信號之間增加延時,也可通過軟件實現。
一、H橋式電機驅動電路
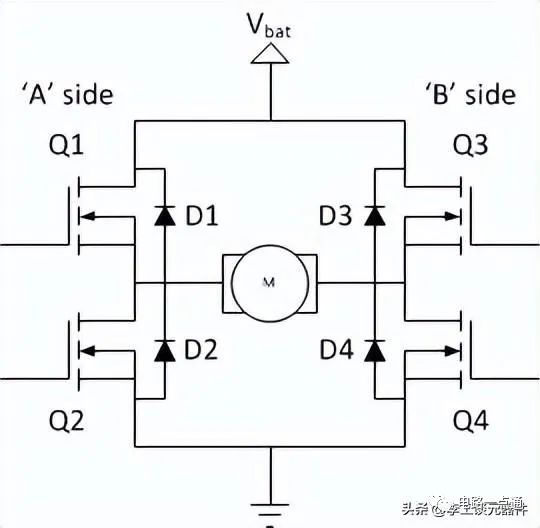
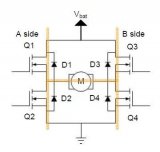
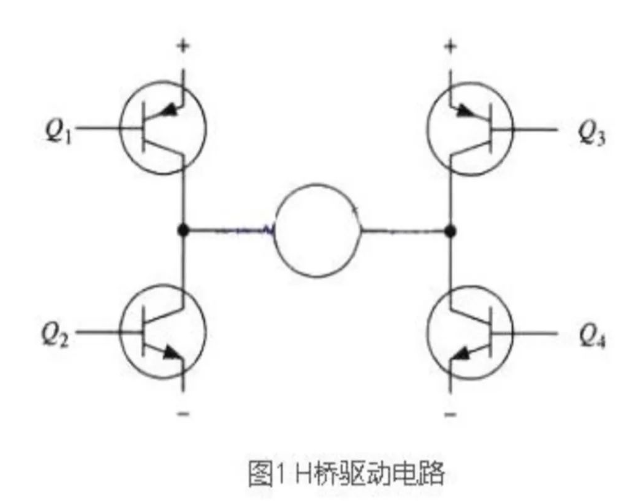
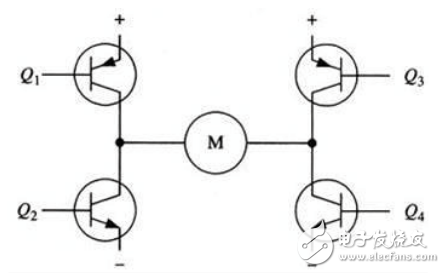
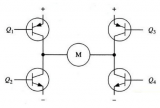
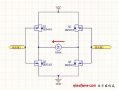
圖4.12中所示為一個典型的直流電機控制電路。電路得名于“H橋式驅動電路”是因為它的形狀酷似字母H。4個三極管組成H的4條垂直腿,而電機就是H中的橫杠(注意:圖4.12及隨后的兩個圖都只是示意圖,而不是完整的電路圖,其中三極管的驅動電路沒有畫出來)。
如圖所示,H橋式電機驅動電路包括4個三極管和一個電機。要使電機運轉,必須導通對角線上的一對三極管。根據不同三極管對的導通情況,電流可能會從左至右或從右至左流過電機,從而控制電機的轉向。

圖4.12 H橋式電機驅動電路
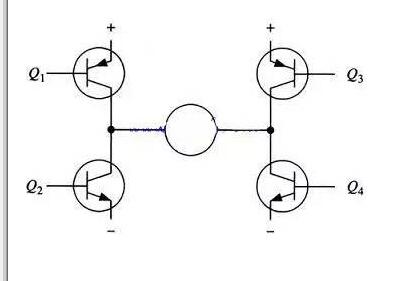
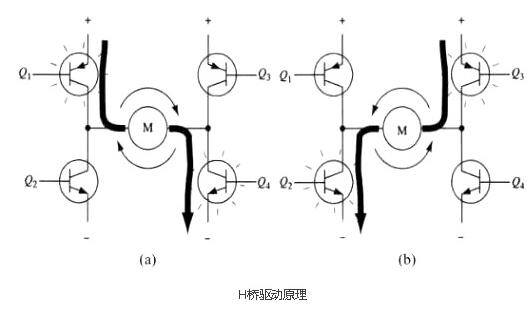
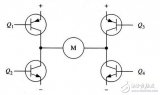
要使電機運轉,必須使對角線上的一對三極管導通。例如,如圖4.13所示,當Q1管和Q4管導通時,電流就從電源正極經Q1從左至右穿過電機,然后再經Q4回到電源負極。按圖中電流箭頭所示,該流向的電流將驅動電機順時針轉動。
當三極管Q1和Q4導通時,電流將從左至右流過電機,從而驅動電機按特定方向轉動(電機周圍的箭頭指示為順時針方向)。

圖4.13 H橋電路驅動電機順時針轉動
?
圖4.14所示為另一對三極管Q2和Q3導通的情況,電流將從右至左流過電機。
當三極管Q2和Q3導通時,電流將從右至左流過電機,從而驅動電機沿另一方向轉動(電機周圍的箭頭表示為逆時針方向)。

圖4.14 H橋電路驅動電機逆時針轉動
二、使能控制和方向邏輯
驅動電機時,保證H橋上兩個同側的三極管不會同時導通非常重要。如果三極管Q1和Q2同時導通,那么電流就會從正極穿過兩個三極管直接回到負極。此時,電路中除了三極管外沒有其他任何負載,因此電路上的電流就可能達到最大值(該電流僅受電源性能限制),甚至燒壞三極管。
基于上述原因,在實際驅動電路中通常要用硬件電路方便地控制三極管的開關。
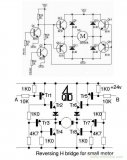
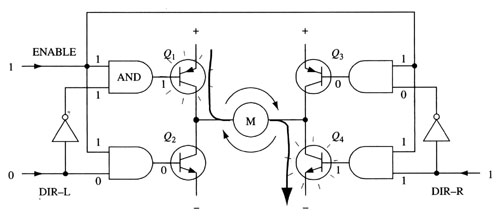
圖4.155所示就是基于這種考慮的改進電路,它在基本H橋電路的基礎上增加了4個與門和2個非門。4個與門同一個“使能”導通信號相接,這樣,用這一個信號就能控制整個電路的開關。而2個非門通過提供一種方向輸人,可以保證任何時候在H橋的同側腿上都只有一個三極管能導通。(與本節前面的示意圖一樣,圖4.15所示也不是一個完整的電路圖,特別是圖中與門和三極管直接連接是不能正常工作的。)

圖4.15 具有使能控制和方向邏輯的H橋電路
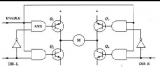
采用以上方法,電機的運轉就只需要用三個信號控制:兩個方向信號和一個使能信號。如果DIR-L信號為0,DIR-R信號為1,并且使能信號是1,那么三極管Q1和Q4導通,電流從左至右流經電機(如圖4.16所示);如果DIR-L信號變為1,而DIR-R信號變為0,那么Q2和Q3將導通,電流則反向流過電機。

圖4.16 使能信號與方向信號的使用
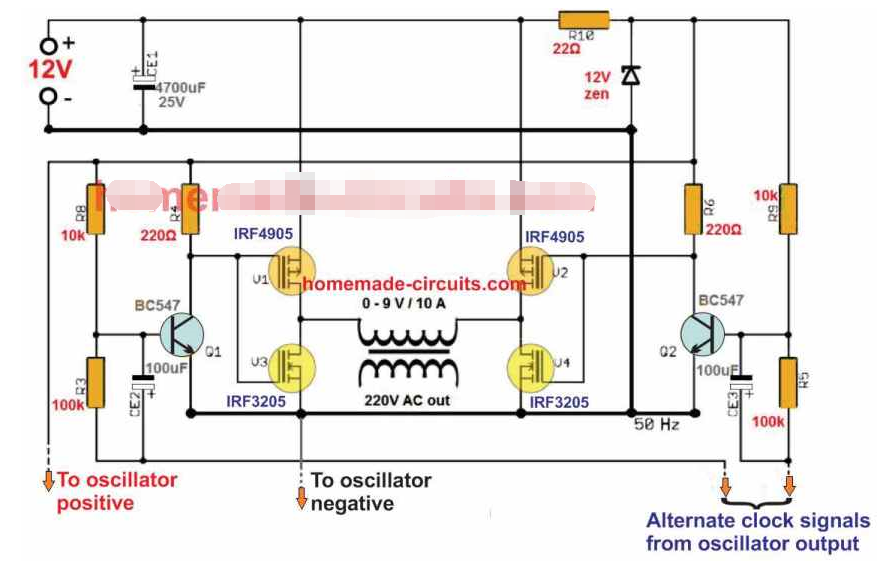
實際使用的時候,用分立件制作H橋式是很麻煩的,好在現在市面上有很多封裝好的H橋集成電路,接上電源、電機和控制信號就可以使用了,在額定的電壓和電流內使用非常方便可靠。比如常用的L293D、L298N、TA7257P、SN754410等。










 工商網監
工商網監
評論