 電子發燒友App
電子發燒友App


數字圖像處理的基本步驟:
(處理圖像)圖像獲取--》圖像濾波與增強--》圖像復原--》彩色圖像處理--》小波與多分辨率處理--》壓縮--》形態學處理--》( 圖像屬性)分割--》表示和描述--》目標識別
圖像的感知和獲取:
1)、單個傳感器獲取;
2)、條帶傳感器獲取;
3)、傳感器陣列獲取;
圖像形成模型:
一副平面圖像可以用二維亮度函數來表示,當一副圖像從物理過程產生時,它的值正比于物理源的輻射能量,因此,f(x,y)一定是非零和有限的,即:
;
當用數學方法描述圖像信息時,通常著重考慮它的點的性質。例如一副圖像可以被看作是空間各個坐標點的結合。它的最普通的數學表達式為:其中(x,y,z)是空間坐標,λ是波長,t是時間,I是圖像強度。這樣一個表達式可以代表一副活動的、彩色的、立體圖像。當研究的是靜止圖像時,則與時間t無關,當是單色圖像時,與波長λ無關,對于平面圖像則與坐標z無關。因此,對于靜止的平面的、單色的圖像來說其數學表達式可簡化為:
人們所感受到的圖像一般都是由物體反射的光組成的。函數f(x,y)可由兩個分量來表示:入射到觀察場景的光源總量;場景中物體反射光的總量。這兩個分量分別稱為入射分量和反射分量,如果用i(x,y)表示入射分量,用r(x,y)表示反射分量,兩個函數合并形成f(x,y),即:
; 其中:,
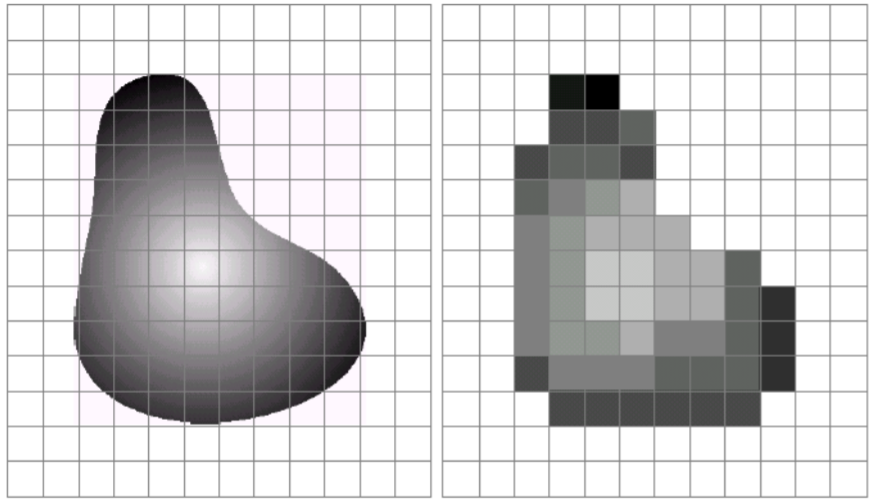
圖像的取樣和量化
圖像取樣
◆ 在取樣時,若橫向的像素數(列數)為M ,縱向的像素數(行數)為N,則圖像總像素數為M*N個像素。
◆ 一般來說,采樣間隔越大,所得圖像像素數越少,空間分辨率低,質量差,嚴重時出現馬賽克效應;采樣間隔越小,所得圖像像素數越多,空間分辨率高,圖像質量好,但數據量大。
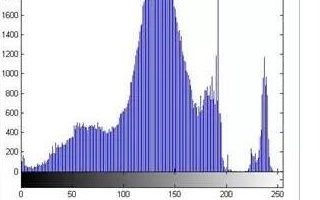
圖像的量化
◆ 量化等級越多,所得圖像層次越豐富,灰度分辨率高,圖像質量好,但數據量大;量化等級越少,圖像層次欠豐富,灰度分辨率低,會出現假輪廓現象,圖像質量變差,但數據量小。
模擬圖像經過采樣后,在時間和空間上離散化為像素。但采樣所得的像素值(即灰度值)仍是連續量。把采樣后所得的各像素的灰度值從模擬量到離散量的轉換稱為圖像灰度的量化(也就是對現實空間場景的灰度數據進行離散化的操作)。
數字圖像表示:
黑白圖像
指圖像的每個像素只能是黑或者白,沒有中間的過渡,故又稱為2值圖像。2值圖像的像素值為0、1。
灰度圖像
灰度圖像是指每個像素的信息由一個量化的灰度級來描述的圖像,沒有彩色信息。
彩色圖像
彩色圖像是指每個像素的信息由RGB三原色構成的圖像,其中RBG是由不同的灰度級來描述的。
圖像的數字表示
令f(s, t)表示一幅具有兩個連續變量s和t的連續圖像函數。通過取樣和量化, 我們可把該函數轉換為數字圖像。將該連續圖像取樣為一個二維陣列f(x,y), 該陣列有M行和N列,其中(x,y)是離散坐標。
在某些討論中,使用傳統的矩陣表示法來表示數字圖像及其像素更為方便:
二維矩陣是表示數字圖像的重要數學形式。一幅M×N的圖像可以表示為矩陣:矩陣中的每個元素稱為圖像的“像素”。每個像素都有它自己的“位置”和“值”,“值”是這一“位置”像素的顏色或者強度。
假定圖像尺寸為M、N,每個像素所具有的離散灰度級數為G;這些量分別取為2的整數冪m,n,k,即M=2m, N=2n,G=2k 則存儲這幅圖像所需的位數是:;如果圖像是正方形,即M=N,當一副圖像有灰度級時,實際上通常稱該圖像為k比特圖像。如,一幅圖像有256可能的灰度級稱為8比特圖像。
空間分辨率N :圖像中可辨別的最小細節的度量
表示方法:每單位距離(mm)線對(黑白線)數目
每單位距離(mm)點(像素點)數
在美國,用每英寸點數(dpi)表示
key:空間分辨率的度量必須針對空間單位來規定才有意義,單純的圖像大小本身沒有意義。
灰度分辨率 k:在灰度級中可分辨的最小變化
即灰度級,指的是用于量化灰度的比特數,通常用2的整數次冪來表示,最常用8bit,bit數的減小傾向于對比度增加
即 2^8 灰度范圍[0~255]
Nk平面中等偏愛曲線解讀
key:對于有大量細節的圖像,可能只需要很少的灰度級
圖像內插:
內插是圖像放大、收縮、旋轉等任務中廣泛采用的基本工具(圖像重采樣)。如由已知像素灰度估計未知位置的像素灰度。
最近鄰內插法
直接取原圖像中與其距離最近的像素的灰度值為該點的灰度值。
缺點:會產生不希望的人為缺陷,如某些直線邊緣的嚴重失真
設i+u, j+v(i, j為正整數, u, v為大于零小于1的小數,下同)為待求象素坐標,則待求象素灰度的值 f(i+u, j+v) 如下圖所示:
如果(i+u, j+v)落在A區,即u《0.5, v《0.5,則將左上角象素的灰度值賦給待求象素,同理,落在D區則賦予右下角象素的灰度值。最鄰近元法計算量較小,但可能會造成插值生成的圖像灰度上的不連續,在灰度變化的地方可能出現明顯的鋸齒狀。
雙線性內插法
用四個最近鄰去估計給定位置的灰度值。
圖一:
如下圖所示:
對于 (i, j+v),f(i, j) 到 f(i, j+1) 的灰度變化為線性關系,則有:
f(i, j+v) = [f(i, j+1) - f(i, j)] * v + f(i, j)
同理對于 (i+1, j+v) 則有:
f(i+1, j+v) = [f(i+1, j+1) - f(i+1, j)] * v + f(i+1, j)
從f(i, j+v) 到 f(i+1, j+v) 的灰度變化也為線性關系,由此可推導出待求象素灰度的計算式如下:
f(i+u, j+v) = (1-u) * (1-v) * f(i, j) + (1-u) * v * f(i, j+1) + u * (1-v) * f(i+1, j) + u * v * f(i+1, j+1)
雙線性內插法的計算比最鄰近點法復雜,計算量較大,但沒有灰度不連續的缺點,結果基本令人滿意。它具有低通濾波性質,使高頻分量受損,圖像輪廓可能會有一點模糊。
雙三次內插:
用16個最近鄰去估計給定位置的灰度,i.e,對(x,y)處賦灰度值 v(x,y),
16個系數可由(x,y)點的16個最近鄰確定,當求和上限改為1時,退化為雙線性內插。 雙三次內插在保持細節方面比雙線性更好,但計算量也更大,雙三次內插目前是商業圖像編輯軟件的標準內插方法。
其他內插方法
采用更多鄰點:樣條法
采用更復雜技術:小波
像素間的關系
相鄰像素
◆ 位于坐標(x, y)的像素p有四個水平和垂直的相鄰像素,每個像素距(x, y)一個單位距離。坐標分別為: (x-1, y) , (x+1, y), (x, y-1), (x, y+1)。此像素集合定義為像素p的4鄰域, 用 N4(p)表示。
◆ 另外,p有4個對角相鄰像素,坐標為:(x-1, y-1) , (x+1, y-1), (x-1, y+1), (x+1, y+1)用ND(p)表示,和N4(P)一起稱為P的8鄰域,用N8(P)表示。
Neighbors(相鄰點):主要有兩種定義:4-neighbors 和8-neighbors。4-neighbors 定義較嚴:一個點周邊有四個相鄰點(藍色);8-neighbors 定義較松:一個點周邊有八個相鄰點(藍色)。4-neighbors 一定是8-neighbors,反之不一定。
Path(路徑):也有4-path 和8-path。4-path 定義較嚴:一個路徑上所有點互為4-neighbors;8-path 定義較松:一個路徑上所有點互為8-neighbors。在4-path 定義下,藍色點不再屬于4-neighbor,路徑因此斷裂。原本在8-path 定義下為連續的路徑,在4-path 定義下可能會斷裂。
鄰接性、連通性、區域和邊界
鄰接性有兩個要素:一個是灰度值的鄰接性(值域V)、一個是物理位置的鄰接性(鄰域,如N4(P)等)。例如,二值圖象中,像素值都為1(或都為0)的像素才有可能被稱為是鄰接的。在一般圖像中,可定義一個值域V,V是0到255中的任一個子集。一般我們考慮三種鄰接性:
◆ 4鄰接:如果點q在N4(P)中,數值在V中,則q和p是4鄰接的;
◆ 8鄰接:如果點q在N8(P)中,數值在V中,則q和p是8鄰接的;
◆ m鄰接(混合鄰接):滿足下列條件的任一個,則具有V中數值的p和q是m連接的。(為了消除8鄰接產生的二義性)
(i)q在N4(P)中
(ii)q在ND(P)中,且集合N4(P)∩N4(Q)中沒有V值的像素。
連通:對于圖像中的某一個像素子集U和其中的兩個點p和q,如果p和q之間有一個有U中全部元素構成的通路,那就說p和q是連通的。
連通集:接上,對于U中的元素p,U中能連通到p的元素的集合叫做U的連通分量,如果U只有一個連通分量,那么U就是一個連通集。
區域:令T是圖像中的某一個子集,如果T是一個連通集,那么稱T是一個區域
距離度量:
1)像素之間距離的定義—對于像素p、q和z,分別具有坐標(x,y),(s,t)和(u,v),如果
(1) D(p,q) ≥ 0 (D(p,q)=0,當且僅當p =q),
(2) D(p,q) = D(q,p)
(3) D(p,z) ≤ D(p,q) + D(q,z)
則稱D是距離函數或度量
2)歐式距離定義:
對于這個距離計算法,具有與(x,y)距離小于等于某個值r的像素是:包含在以(x,y)為圓心,以r為半徑的圓平面
3)D4距離(城市距離): D4(p,q) = |x – s| + |y – t|
D4距離舉例:
具有與(x,y)距離小于等于某個值r的那些像素形成一個菱形,
例如,與點(x,y)(中心點)D4距離小于等于2的像素,形成右邊固定距離的輪廓 ,具有D4 = 1的像素是(x,y)的4鄰域
4)D8距離(棋盤距離) :D8(p,q) = max(|x – s| ,|y – t|)
D8距離舉例
具有與(x,y)距離小于等于某個值r的那些像素形成一個正方形,例如,與點(x,y)(中心點)D8距離小于等于2的像素,形成右邊固定距離的輪廓,具有D8 = 1的像素是(x,y)的8鄰域。
數學工具:
1、陣列與矩陣操作:
在對一幅圖像或多幅圖像進行操作時,要首先明白是陣列操作還是矩陣操作。Eg:2x2圖像:
陣列計算:
矩陣計算:
2、線性操作和非線性操作:
算子H:對于給定的輸入圖像f(x, y),產生一幅輸出圖像g(x, y),即H[f(x, y)] = g(x, y)。
如求和算子:∑[aifi(x, y)] = g(x, y)。
線性算子:
如果滿足
H[aifi(x, y) + ajfj(x, y)] = aiH[fi(x, y)] + ajH[fj(x, y)] = aigi(x, y) + ajgj(x, y)
則稱H是一個線性算子。最大值操作不是線性算子。
3、算術操作:
圖像的算術操作是陣列操作,即在相對應的像素對之間執行。
4種算術操作表示為:
s(x, y) = f(x, y) + g(x, y);
d(x, y) = f(x, y) - g(x, y);
p(x, y) = f(x, y) × g(x, y);
v(x, y) = f(x, y) ÷ g(x, y);
處理圖像:
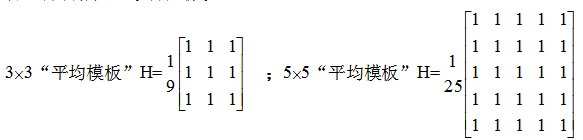
1.利用帶噪圖像的相加(平均)進行降噪處理。
2.利用圖像相減增強差別。
3.利用圖像相乘和相除來校正陰影。
給定一幅圖像f,保證圖像間的算術操作的整個值域落入到某個固定比特數的方法,執行以下兩步:
fm = f-min(f)
fs = K[fm/max(fm)]
注意:在執行除法操作時,需要將一個較小的數加到除數圖像的像素上,以避免用0去除。
4、集合和邏輯操作:
1)、基本集合操作:屬于,包含,交差并補等。
灰度圖像的集合操作:灰度值的并集操作和交集操作通常分別定義為相應像素對的最大和最小,而補集操作定義為常數與圖像中每個像素的灰度間的兩兩之差。
如:灰度級圖像的元素用集合A表示,其中元素是三元組形式(x,y,z),x與y為空間坐標,z為灰度。補集:
Ac={(x, y, K-z)|(x, y, z)∈A};
其中K = 2k - 1,k為表示z的灰度的比特數。
如
An = Ac={(x, y, 255-z)|(x, y, z)∈A};
同理,兩個灰度集合A和B的并集可定義為集合
A∪B = {max(a, b)|a∈A, b∈B};
2)、基本的邏輯操作:AND, OR, NOT, XOR
3)、模糊集合
令U代表所有的人,令A為U的子集,為年輕人的集合。引入隸屬度函數對U中每個元素賦值。隸屬度函數簡單地定義為一個閾值,低于該閾值的為年輕人,高于該閾值的為非年輕人。思考:假設20歲為閾值,20歲為年輕人,20歲零一秒就不是年輕人了?所以需要更多的靈活性,即從年輕到非年輕過渡。使用模糊集合可以聲明一個人的年輕度為50%。換句話說,年齡是一個不精確的概念,而模糊邏輯提供處理這種概念的工具。
5、空間操作
空間操作直接在給定圖像的像素上執行,分為三類:單像素操作、鄰域操作、幾何空間變換
一、單像素操作
s = T(z),
其中,z是原圖像中像素的灰度,s是處理后圖像中相應像素的(映射)灰度,T為變換函數。
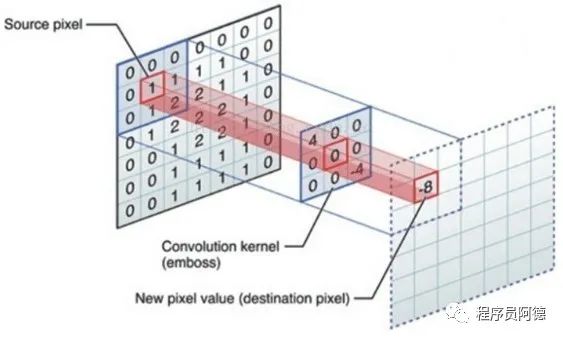
二、鄰域操作
與單像素操作類似,Sxy代表圖像f中任意一點(x, y)為中心的鄰域集,鄰域處理是在Sxy內的像素經指定操作后輸出到另一圖像相同坐標處,形成新圖像g。
三、幾何空間變換
幾何空間變換主要由兩個基本操作組成:(1)、坐標的空間變換;(2)、灰度內插;
最常用的空間坐標變換之一是仿射變換。
其中(v, w)是原圖像中像素的坐標,(x, y)是變換后圖像中像素的坐標。
基于上式,可以實現恒等變換、尺度變換、旋轉變換、平移變換、垂直偏移變換、水平偏移變換。
如垂直偏移變換:
圖像配準:
用于對齊兩幅或多幅相同場景的圖片。
圖像配準需要輸入圖像與參考圖像。輸入圖像是我們希望變換的圖像,參考圖像是想要配準輸入圖像的圖像。
圖像配準的主要方法是使用約束點,輸入圖像產生輸出圖形的特定變換通常是不知道,所以需要估計變換函數,而估計變換函數問題是建模問題之一。
基于雙線性近似的簡單模型:
x = c1v + c2w + c3vw + c4;
y = c5v + c6w + c7vw + c8;
(v, w)和(x, y)分別是輸入圖像和參考圖像中約束點的坐標。如果在兩幅圖像中有四對相應的約束點,則可以解出8個未知參數。這樣構成簡單模型,從而可以把一幅圖像的像素變換為另一幅圖像的像素位置。也可以選擇更復雜的模型,如最小均方算法等。
6、向量和矩陣操作
多光譜圖像處理是使用向量和矩陣操作的典型領域。
如:RGB圖像的每個像素都有三個分量(z1:紅色圖像中的亮度;z2:綠色圖像中的亮度;z3:藍色圖像中的亮度)形成三維向量
多光譜需要n幅分量圖像,形成n維向量【可以使用向量矩陣理論工具】
7、圖像變換:
之前的圖像處理方法都是直接在圖像像素上進行操作,但是某些情況下,通過變換輸入圖像來表達圖像處理任務,在變化域執行指定任務,之后再用反變換返回到空間域會更好。
變換對 :T(u,v) ---正變換核; R[T(u,v)]----反變換核;
8、概率方法:有很多應用,此處不一一列舉。




















 工商網監
工商網監
評論