 電子發燒友App
電子發燒友App


隨著經濟的發展,汽車數量越來越多,城市道路壓力越來越大。交通信號燈作為管制交通流量、提高道路通行能力的有效手段,對減少交通事故有明顯效果。而傳統的交通燈采用固定的時間控制,不能根據車流量大小來控制紅綠燈時間,經常出現通行時間與車流量不適應情況,不僅浪費了時間,容易造成“堵車”現象。為克服這種少車路口綠燈時無車通行或多車路口綠燈通行時間短而堵車等資源浪費的現象,本文采用超聲計數的方式設計了一種實時監測車流量的智能交通燈控制,通過動態調節增加了靈活性和實用性。
1、系統結構
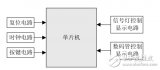
系統主要由微控制器模塊、電源管理模塊、超聲車流量檢測模塊、紅外遙控模塊、十字路口交通燈組和以太網接口等幾部分組成,系統整體框圖如圖1所示。系統在每個交通路口安裝超聲檢測裝置,單片機通過該裝置實時檢測路口的狀態,根據程序邏輯控制交通燈組,實現對交通燈的智能控制。由于單片機的調控能力有限,在特殊的情況下需要交警進行手動控制。雖然現行使用的交通燈控制系統提供人為干預功能,但都是由交警在遠離路口的交通燈機箱處進行控制,非常不方便,為此設計了紅外遙控模塊,交警在十字路口的任何地方都能夠實現對交通燈的控制。

圖1 ?系統整體框圖
系統中預留了以太網接口模塊。采集的數據可通過節點傳輸到交通部門的計算機主機,提供遠程監測交通路口的狀況功能,同時還允許對交通燈進行遠程的控制,為交通系統的網絡化、信息化管理奠定基礎。
系統的MCU選擇為MSP430F449,主要完成本系統對路口16個監測裝置的信號檢測,數據處理和對4個燈組的控制。
2、車輛檢測
2.1、超聲檢測模塊的安裝
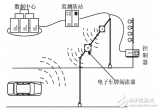
考慮到右轉車道車輛可以直接通過,只在直行車道和左轉車道上架設超聲傳感器。在每個方向的通道上均架設兩組超聲傳感器,具體架設位置如圖2所示。前一組緊挨停車線,檢測駛離該方向通道的車輛數(下文中稱其為超聲模塊組1);后一組架設在距停車線80~100m處(下文中稱其為超聲模塊組2),檢測駛入該方向通道的車輛數。兩者之差既是該時刻該通道上的車輛數,也是該通道等待通行的車輛數,此數據是控制該路口交通燈通行時間的依據。
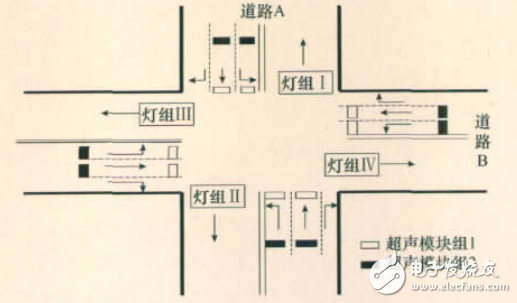
圖2 ?超聲計數模塊架設平面上示意圖
2.2、超聲計數模塊
超聲波測距是通過超聲脈沖回波渡越時間法來實現的。設超聲波脈沖由傳感器發出,經障礙物反射,到回波的接收所歷經的總時間為t,超聲波在空氣中的傳播速度為v,則從傳感器到目標物體的距離D可用下
式求出:
D=t×v/2 ? ? ? (1)
超聲測距系統的原理框圖如圖3所示。

圖3 ? 超聲測距系統的原理框圖
2.2.2、超聲計數原理
超聲計數是超聲測距技術的深化應用。超聲測距模塊架設在車道的上方,設無車時測得的距離是模塊到地面的距離D1,有車時測得的距離是模塊到車頂的距離D2,前后兩次測得的距離差為ΔD。當車輛駛入超聲模塊的測量范圍時,超聲模塊首先測得距離D1,下一周期測得距離D2,前后兩次測得的距離差為ΔD=D2-D1<0;當無車通過、車輛通過的過程中距離沒有任何變化ΔD=0;當車輛駛離超聲模塊的測量范圍時,超聲模塊首先測得距離D2,下一周期測得距離D2,前后兩次測得的距離差為ΔD=D1-D2>0。故每檢測到一次ΔD<0,代表一輛車通過超聲模塊下方,從而實現對車輛的計數。超聲計數原理如圖4所示。

圖4 ?超聲計數原理
2.2.3、超聲計數模塊選擇
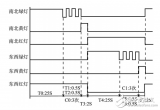
本系統選擇HC-SR04超聲波測距模塊來實現超聲測距,該模塊時序圖如圖5所示。模塊回響電平的脈寬(高電平的時間)即測距渡越時間,測出脈寬并利用式(1)就能夠實現對障礙物距離的測量。脈寬與距離之間存在線性關系,檢測脈寬的改變,就能夠實現對車輛的計數。

圖5 ? ? HC-SR04超聲波測距模塊時序圖
2.3、檢測模塊與MSP430的信號交互
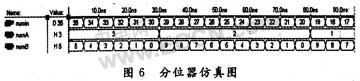
由圖5HC-SR04超聲波測距模塊時序圖可知,HC-SR04與MSP430之間存在信號的交互:1個為超聲模塊觸發信號,由MSP430輸出到HC-SR04;另1個為回響電平,由HC-SR04輸出到MSP430。實驗測得的觸發信號如圖6所示,回響信號如圖7所示(障礙物在2.1m處)。

圖6觸發信號

圖7回響信號
由理論分析可知觸發信號頻率不能太高,否則會引起信號的混疊,導致誤判;頻率也不能太低,否則不能夠實現對車輛的實時檢測,故本系統選擇觸發頻率為10Hz。
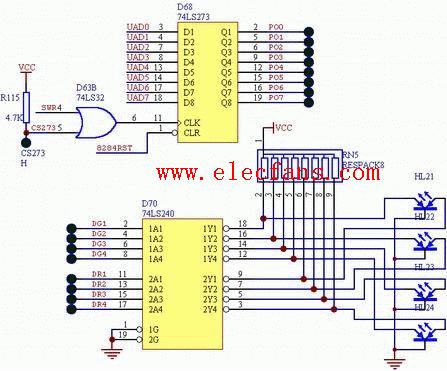
利用MSP430中TimerA、TimerB的捕獲功能可以實現對回響脈沖的精確計時,進而通過內部程序算法實現對車輛的計數[7-8]。為了節省MSP430內部的定時器資源,將超聲模塊組1四個路口的回響信號分時[9]的輸入到MSP430中。檢測模塊電路圖如圖8所示。

圖8 ?檢測模塊電路圖
2.4、誤差分析
2.4.1、測距誤差
本系統是以室溫(15℃)時的聲速(340m/s)計算距離的,而實際環境中的聲速是隨機量,有如下計算公式:
v=331.3+0.606c(2)
c為攝氏氣溫。根據式(2)知:
聲速誤差
Δv=(c-15)×0.606
有測距誤差
ΔD=TΔv(3)
測距誤差會引起車輛的誤判,最終導致系統錯誤的分配時間。
為了消除此誤差,系統不以某個固定的脈寬(對應某個固定的距離)為車輛判據,而以脈寬的顯著變化為車輛的判據,由于溫度相對測距時間是一個慢變量,在一輛車通過的時間內(1s)認為不變,此種處理方式可消除聲速誤差。
2.4.2、車輛的混道行駛誤差
另一個會引起誤差的因素是車輛的混道行駛。一種情況是右轉的車輛通過模塊2下方,使計數增加;一種情況是左轉或者右轉的車輛通過右轉車道進入模塊2和模塊1之間的范圍,使計數減少。但因其發生的概率很小,兩種情況有互補作用,且少量的計數不準確不會對車輛的通車時間的設定產生很大的影響,因此可以忽略不計。
綜上所述,系統的誤差在允許范圍內,不會對系統的功能產生很大的影響,系統可以達到智能調控交通燈的目的。
3、紅外遙控模塊電路設計
紅外遙控模塊核心部分是數據的編碼發射和解碼接收,本系統采用PT2262和PT2272[10-11]紅外發射接收芯片來實現上述功能。電路圖如圖9、圖10所示。


4、交通燈驅動電路設計
交通燈組是大功率器件,不能直接由單片機驅動。系統利用繼電器實現弱電控制強電,交通燈驅動電路如圖11所示。

圖11 交通燈驅動電路
5、系統軟件設計
本系統的主控制程序由兩部分組成:車流量智能處理模塊和人工手動處理模塊。主程序流程圖如圖12所示。
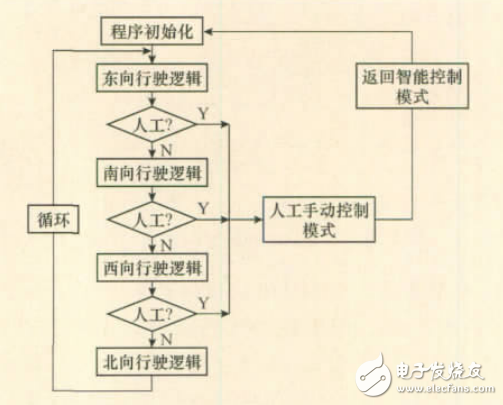
圖12 ?主程序流程圖
車流量智能處理模塊:
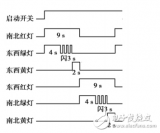
程序分時對各個路口進行循環控制,下面以東向行駛車道為例說明,程序邏輯圖見圖13。

圖13 ?東向行駛邏輯
首先根據存留車輛數預置初始時間,單個車道時間控制表見表1。此處假設已檢測到東向車道存留車輛數為25,系統設置初始時間為15s。東向綠燈亮了15s后,東向超聲模塊組1開始檢測路口通行狀態。若檢測時間未達到5s,模塊組1在連續的0.5s內沒有檢測到車輛通過并且其他路口有車輛等待,東向即亮黃燈3s,轉向對下一個路口的控制;若檢測時間已達到5s,無論東向是否仍有車輛通過,東向也直接亮黃燈3s,轉向下一個路口的控制。這樣就可以減少無車車道的多余通行時間,縮短其余車道上車輛的等待時間,提高通行效率。
表1 ?單個車道時間控制表

人工手動處理模塊:當某個路口的車輛大于設定的限定值50時,說明此路口已經進入嚴重擁堵的狀態,此時需要由交警進行手動控制。通過手動控制硬件模塊,人工協調各個路口的通車時間,以確保擁堵交通下的道路行駛安全。
6、結語
以車流量檢測為基礎的智能交通燈控制系統,在道路設施一定、車流輛一定的情況下,對解決城市交通問題、提高道路利用率、提升交通自動化水平和管理水平具有一定的意義。本設計投資少、制作簡單、安裝方便、硬件穩定可靠、功能實用,具有實際推廣應用價值。












 工商網監
工商網監
評論