 電子發燒友App
電子發燒友App


設備驅動程序是任何操作系統的必不可少的、最保密的一個組成部分,它們實現了計算機系統所有附屬設備的一個標準接口,它包含與硬件直接相關的設備驅動。從廣義上說,“驅動程序”是指一些函數的集合,這些函數都能對硬件設備進行操作。驅動程序的概念在沒有固定的操作系統的時候,是一個比較模糊的定義。簡單地理解就是提供了一個軟件到硬件(也可以是虛擬硬件)操作的函數。通常主要應該包括:設備初始化、設備的讀寫(輸入輸出)、設備的控制等信息。在μC/OS-Ⅱ下沒有統一的設備驅動接口——不像Windows或者linux下通過設備文件的定義模式,所以,把一些對硬件操作是通過一般的函數來完成的,叫成“驅動程序”也不為過。
1. 簡介
外設驅動程序是實時內核和硬件之間的接口,是連接底層硬件和內核的紐帶。
編寫驅動程序模塊應滿足以下主要功能:
① 對設備初始化;
② 把數據從內核傳送到硬件和從硬件讀取數據;
③ 讀取應用程序傳送給設備的數據和回送應用程序請求的數據;
④ 監測和處理設備出現的異常。由于在μC/OS-Ⅱ下沒有統一的設備驅動接口,在該操作系統中設備驅動的設計和實現主要是通過一些對硬件操作的函數來完成。
2. μC/OS-Ⅱ操作系統啟動過程中的硬件初始化
基于μC/OS-II的應用系統工作時,首先把CPU初始化;接著進行操作系統初始化,主要完成任務控制塊(TCB)初始化、TCB優先級表初始化、空任務的創建等;然后開始創建新任務,并可在新創建的任務中再創建其他的新任務;最后調用OSSTART()函數啟動多任務調度。
當μC/OS-Ⅱ實際移植到具體的硬件平臺中時,系統初始化時還要進行硬件的初始化。主函數是系統啟動首先執行的一個函數,在啟動μC/OS—Ⅱ之前,要屏蔽所有中斷,并對全局變量初始化,防止運行出錯。硬件初始化主要包括中斷初始化,串口、鍵盤、顯示等設備初始化。μC/OS—Ⅱ的初始化通過調用OSInit()函數,為OS分配任務隊列、優先級狀態表和準備狀態表,初始化全局變量,并且創建一個空循環任務。接下來,在啟動μC/OS—Ⅱ前調用OSTaskCreate()創建所有用戶任務,并置準備態,創建任務時,要指定每個任務的優先級、堆棧大小和位置、任務函數入口。調用OS2Start()啟動μC/OS—Ⅱ。從就緒隊列中找到優先級最高的任務,作為當前任務執行。流程如圖所示。
3. μC/OS-Ⅱ操作系統對硬件的操作和控制
3.1 函數控制硬件
前面已經提到過,不像其他的操作系統,在μC/OS—Ⅱ中沒有統一的設備驅動接口,因此對硬件的操作和控制可以通過函數來完成。在啟動過程中完成硬件初始化后,系統創建一個空循環任務,然后就可以調用OSTaskCreate()創建用戶任務,在任務用戶任務中選擇要控制的硬件,選擇最佳的控制方法,調用用戶自己編寫的函數來完成。
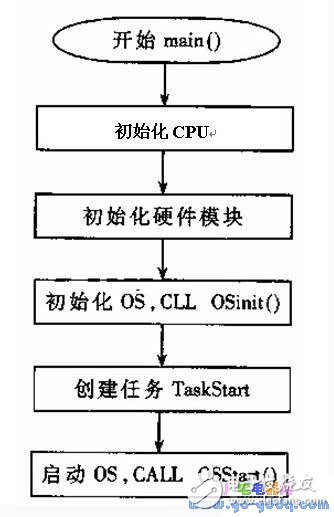
圖 系統啟動流程
3.2 BSP
BSP(板級支持包)是介于底層硬件和操作系統之間的軟件層次,它完成系統上電后最初的硬件和軟件初始化,并對底層硬件進行封裝,使得操作系統不再面對具體的操作。
為μC/OS-Ⅱ編寫一個簡單的 BSP。它首先設置CPU內部寄存器和系統堆棧,并初始化堆棧指針,建立程序的運行和調用環境;然后可以方便地使用C語言設置硬件的配置環境,并編制相應的操作函數,為操作系統調用提供統一的接口;在CPU、板級和程序自身初始化完成后,就可以把CPU的控制權交給操作系統了。
4. 實際應用舉例
既然在μC/OS-Ⅱ下沒有統一的設備驅動接口,系統對硬件的控制是通過一些對硬件操作的函數來完成的。下面以在μC/OS-Ⅱ實時內核下驅動程序讀取A/D的三種方法,分析在實際的工程實踐中μC/OS-Ⅱ設備驅動的設計和實現,以及在設計過程中應注意的一些問題。
以一個單片機數據采集系統為例,硬件環境基于C8051F015單片機。A/D轉換是單片機數據采集系統的重要組成部分,實時內核下A/D驅動程序的實現過程主要取決于A/D轉換器的轉換時間。我們首先比較和分析μC/OS-Ⅱ下A/D采樣數據的三種方法;其次介紹C8051F015單片機A/D模數轉換器的配置及特點;最后,在μC/OS-II內核移植到8位單片機C8051F015的基礎上,介紹編寫A/D驅動程序的一般思路和方法。
4.1 μC/OS-II實時內核下的A/D讀取方法
實時內核下,驅動程序采用什么方法讀取A/D采樣數據是首先考慮的問題。許多因素將影響讀取A/D,如A/D的轉換時間、模擬值的轉換頻率、輸入通道數等,但最主要的是取決于A/D的轉換時間。典型的A/D轉換電路由模擬多路復用器(M U X)、放大器和模數轉換器(ADC)三部分組成。下面描述讀取A/D的三種方法。
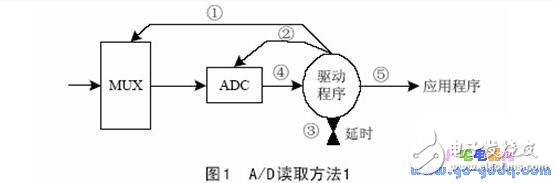
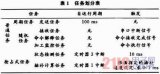
圖1所示的是第1種讀取方法。假設A/D 轉換器的轉換時間較慢(5ms以上),應用程序調用圖1所示的驅動程序,并傳遞要讀取的通道。驅動程序通過M U X選擇要讀取的模擬通道(①)開始讀。轉換前,延時幾μs以便使信號通過M U X傳遞,并使之穩定下來。接著,ADC被觸發開始轉換(②)。然后驅動程序延時一段時間以完成轉換(③)。延時時間必須比ADC轉換時間長。最后驅動程序讀取ADC轉換結果(④),并將轉換結果返回到應用程序(⑤)。
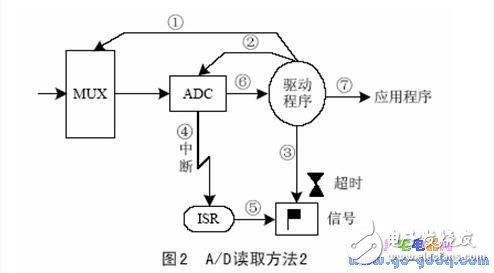
圖2所示的是第2種讀取方法。當模擬轉換完成后,ADC產生的一個中斷信號。若ADC轉換完成,ISR給信號量發一個信號(⑤),通知驅動程序,ADC已經完成轉換。如果ADC在規定的時限內沒有完成轉換,信號量超時(③),則驅動程序不再等待下去。驅動程序和中斷服務子程序(ISR)的偽代碼如下:
ADRd(ChannelNumber)
{
選擇要讀取的模擬輸入通道;
等待A M U X 輸出穩定;
啟動A D C 轉換;
等待來自ADC 轉換結束中斷產生的信號量;
if (超時){
*err=信號錯誤;
return;
} else {
讀取ADC轉換結果并將其返回到應用程序 ;
}
}
ADCoversion Complete ISR{
保存全部CPU 寄存器; /* 將CPU的PSW、ACC、 B、
DPL、DPH及Rn入棧*/
通知內核進入ISR(調用OSIntEnter()或OSIntNesTIng直接加1);
發送A D C 轉換完成信號; /* 利用μC/OS-II內核的
OSSemPost()*/
通知內核退出ISR(調用OSIntExit());
恢復所有CPU 寄存器; /* 將CPU 的PSW、ACC、B、DPL、DPH及Rn出棧*/
執行中斷返回指令(即RETI);
}
在這種方法里,要求ISR執行時間與調用等待信號的時間之和為A/D轉換時間。
如果A/D轉換時間小于處理中斷時間與等待信號所需的時間之和,則可以用第三種方法。如圖3所示,前兩步(①②同以上兩種方法)結束后,驅動程序接著在一個軟件循環中等待(③)ADC直到完成轉換。在循環等待時,驅動程序檢測ADC的狀態(BUSY)信號。如果等待時間超過設定的定時值(軟件定時),則結束等待循環(循環等待超時)。如果在循環等待中,檢測到ADC發出轉換結束的信號(BUSY)時,驅動程序讀取ADC轉換結果(④)并將結果返回到應用程序(⑤)。
驅動程序偽代碼如下:
ADRd(ChannelNumber){
選擇要讀取的模擬輸入通道;
等待A M U X 輸出穩定;
啟動A D C 轉換;
啟動超時定時器;
while (ADC Busy & Counter??0);/* 循環檢測 */
if (Counter==0){
*err=信號錯誤;
return;
} else {
讀取ADC 轉換結果并將其返回到應用程序 ;
}
}
A/D 轉換速度快,這種驅動程序的實現是最好的。
4.2 C8051F015單片機A/D模數轉換器
再來簡單介紹一下C8051F015單片機A/D模數轉換器的配置及特點。
在C8051F015 單片機中,ADC的轉換時鐘周期至少在400ns,轉換時鐘應不大于2MHz。一般在啟動ADC之前都要處于跟蹤方式,而ADC一次轉換完成要用16個系統時鐘。另外,在轉換之前還要加上3個系統時鐘的跟蹤/保持捕獲時間,所以完成一次轉換需19個ADC轉換時鐘(9.5μs)。圖1中的方法簡單,轉換時間在ms級以上,一般用于變化慢的模擬輸入信號,不適用于C8051F015。
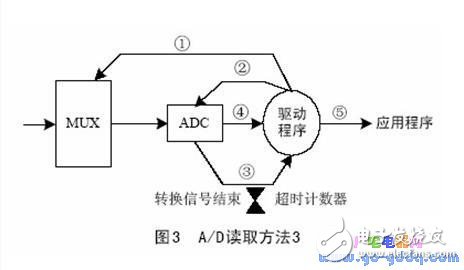
圖2中的方法,為了減少μC/OS-II內核調用ISR所用時間,ISR一般都用匯編語言編寫。從程序1中ISR偽代碼可以看出,盡管ISR用匯編語言編寫,代碼效率高,但μC/OSII調用ISR的時間與調用等待信號時間之和大于A/D的轉換時間,所以C P U用于ISR 和循環檢測的開銷大。圖3 所示的方法顯然適合于C8051F015 單片機。其優點是:可以獲得快速的轉換時間;不需要增加一個復雜的ISR;轉換時信號改變時間更短;C P U 的開銷小;循環檢測程序可被中斷,為中斷信號服務。
4.3 A/D驅動程序的編寫
外設驅動程序是實時內核和硬件之間的接口,是連接底層硬件和內核的紐帶。編寫驅動程序模塊應滿足以下主要功能:① 對設備初始化;② 把數據從內核傳送到硬件和從硬件讀取數據;③ 讀取應用程序傳送給設備的數據和回送應用程序請求的數據;④ 監測和處理設備出現的異常。
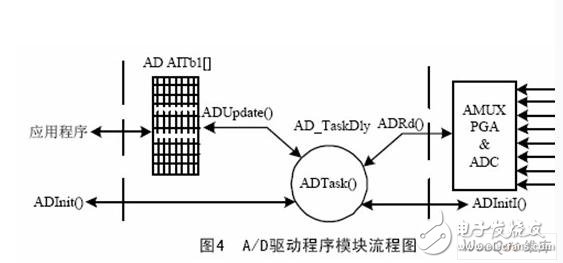
A/D轉換電路作為一個模擬輸入模塊,μC/OS-II內核應把它作為一個獨立的任務(以下稱為ADTask())來調用。A/D驅動程序模塊流程如圖4所示。ADInit()初始化所有的模擬輸入通道、硬件ADC以及應用程序調用A/D模塊的參量,并且ADInit()創建任務ADTask()。ADTb1 [ ]是一個模擬輸入通道信息、ADC硬件狀態等參數配置以及轉換結果存儲表。ADUpdate()負責讀取所有模擬輸入通道,訪問ADRd()并傳遞給它一個通道數。ADRd()負責通過多路復用器選擇合適的模擬輸入,啟動并等待ADC轉換,以及返回ADC轉換結果到ADUpdate()。
在μC/OS-II 實時內核下各原型函數、數據結構和常量的定義如下。
INT16S ADRd(INT8U ch);
/* 定義如何讀取A/D,A/D必須通過AIRd()來驅動 */
void ADUpdate(void);
/* 一定時間內更新輸入通道 */
void ADInit(void);
/* A/D 模塊初始化代碼,包括初始化所有內部變量(通
過ADInit()初始化ADTb[]),初始化硬件A/D(通過ADInitI())及創建任務ADTask() */
void ADTask(void data);
/* 由ADInit()創建,負責更新輸入通道(調用ADUpdate()) */
void ADInitI(void);
/* 初始化硬件A/D */
AD_TaskPrio:設置任務ADTask()的優先級。
AD_TaskStkSize:設置分配給任務ADTask()的堆棧大小。
AD_MaxNummber :AMUX 的輸入通道數。
AD_TaskDly:設定更新通道的間隔時間。
AD ADTb1[AD_MaxNummber]:AD 類型的數組(AD 是定義的數據結構)。
4.4 總結
對于A/D轉換器接口電路驅動程序的編寫歸納出以下幾點:
① 在決定采用具體的驅動方案之前,分析設備接口電路的特點,尤其是了解設備的配置和特點;
② 對于處理速度快的設備,可能出現CPU的處理速度與設備處理速度不匹配,一般的設備中不帶有FIFO緩沖區,須在內存中開辟緩沖區;
③ 在應用程序讀取設備之前,一定要初始化硬件(調用初始化函數),合理定義硬件的信息和狀態變量;
④ 不同的外設配置、環境、轉換精度等都會影響到設備驅動的設計,要對各個不同的外設進行具體分析。
5. 結束語
在μC/OS-Ⅱ下沒有統一的設備驅動接口,對硬件的控制和管理是通過函數來實現的。設備的初始化、設備的讀寫和控制對應各自的函數,實現各自的功能。μC/OS-Ⅱ下開發設備的驅動程序,應該考慮到具體硬件的特征和配置情況,對不同的外設情況選擇最佳的硬件控制和管理方法。










 工商網監
工商網監
評論