將伺服電機(jī)改成連續(xù)轉(zhuǎn)動(dòng)
任何伺服電機(jī)都可以改成雙向變速電機(jī)。通常來(lái)說(shuō)控制電機(jī)的速度和方向是需要
2010-09-30 18:15:04 1745
1745 
伺服電機(jī)又稱執(zhí)行電機(jī),在自動(dòng)控制系統(tǒng)中,用作執(zhí)行元件,把收到的電信號(hào)轉(zhuǎn)換成電機(jī)軸上的角位移或角速度輸出。伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng)
2023-06-13 11:18:391338 伺服電機(jī)是按照功能說(shuō)得,指的是用于伺服的電機(jī)。通常是直流電機(jī),即可以連續(xù)旋轉(zhuǎn)的電機(jī)。步進(jìn)電機(jī)是按照特性命名的,指它的轉(zhuǎn)動(dòng)是一步一步的。例如一個(gè)360分度的步進(jìn)電機(jī),轉(zhuǎn)一圈要走360步,每一步轉(zhuǎn)1度
2021-06-28 08:44:47
方法一:看伺服電機(jī)這邊的命令脈沖累計(jì)有沒(méi)有正確的遞增值。方法二:看PLC是否有輸出了,觀察Q燈判斷程序問(wèn)題。方法三:PLC(或變換電路)是否輸出與伺服電機(jī)相適應(yīng)的電壓。伺服電機(jī)的無(wú)自轉(zhuǎn)現(xiàn)象是指當(dāng)控制信號(hào)消失時(shí),伺服電機(jī)會(huì)立即響應(yīng),停止轉(zhuǎn)動(dòng),伺服電機(jī)的旋轉(zhuǎn)取決于控制信號(hào)。
2023-03-06 17:25:59
伺服電機(jī)功率怎么計(jì)算?伺服電機(jī)慣量如何匹配?
2021-09-24 13:12:18
發(fā)出對(duì)應(yīng)數(shù)量的脈沖,這樣,和伺服電機(jī)接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來(lái),系統(tǒng)就會(huì)知道發(fā)了多少脈沖給伺服電機(jī),同時(shí)又收了多少脈沖回來(lái),這樣,就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位,可以
2018-10-26 11:28:38
伺服電機(jī)是什么?伺服電機(jī)分為哪幾大類?伺服電機(jī)的主要特點(diǎn)有哪些?
2021-07-15 06:58:16
驅(qū)動(dòng)器按圖紙接上電源,通電。第三步,接上編碼器,再開(kāi)機(jī)。第四步,按照說(shuō)明書(shū)上設(shè)置驅(qū)動(dòng)器。我設(shè)置了“速度控制模式”,然后旋動(dòng)電位器,電機(jī)沒(méi)有轉(zhuǎn)動(dòng)。第五步,重新設(shè)置了伺服驅(qū)動(dòng)器,改成“位置控制模式”,把
2018-11-06 11:26:22
1、伺服電機(jī)有小、中、大慣量的,如何選擇啊?大慣量的是不是是不是配大慣性的負(fù)載?小慣量的是不是配小慣量的負(fù)載?這個(gè)有什么好處呢?2、如果一個(gè)設(shè)備有大慣量,選用了大慣量的伺服電機(jī)就不會(huì)出現(xiàn)制動(dòng)不良了嗎?設(shè)備就不會(huì)過(guò)沖了嗎?
2023-03-07 15:41:58
什么是伺服系統(tǒng)?伺服電機(jī)的工作原理是什么?交流伺服電機(jī)的工作原理是什么?
2021-10-11 08:32:00
”的系統(tǒng):運(yùn)動(dòng)指令變化緩慢的伺服系統(tǒng), 不需校驗(yàn)負(fù)載慣量,但是合適的負(fù)載慣量有助于減小速度波動(dòng)。 JL 負(fù)載慣量;Jm 伺服電機(jī)慣量 概念 慣量就是剛體繞軸轉(zhuǎn)動(dòng)的慣性的度量。轉(zhuǎn)動(dòng)慣量是表征剛體轉(zhuǎn)動(dòng)
2023-03-07 15:37:58
電壓,好!電機(jī)轉(zhuǎn)動(dòng)起來(lái)了。伺服驅(qū)動(dòng)器上的轉(zhuǎn)數(shù)達(dá)到了1000、2000、3000最后可到4000多轉(zhuǎn)。說(shuō)明書(shū)上推薦是3000轉(zhuǎn)的,再高速可能會(huì)有些問(wèn)題。
第五步,重新設(shè)置了伺服驅(qū)動(dòng)器,改成“位置控制模式
2023-11-09 07:49:40
伺服電機(jī)的優(yōu)點(diǎn)有哪些?伺服電機(jī)的缺點(diǎn)有哪些?伺服電機(jī)的特點(diǎn)會(huì)影響電機(jī)正常運(yùn)作嗎?
2021-09-28 07:58:44
電機(jī)轉(zhuǎn)動(dòng)的基本原理是什么?電機(jī)運(yùn)動(dòng)的基本原則有哪些?
2021-07-21 07:59:28
DC伺服電機(jī)UVW相可以不加驅(qū)動(dòng)器改成直接由DC電源驅(qū)動(dòng)嗎?
2023-03-30 17:26:52
adxl345在連續(xù)轉(zhuǎn)動(dòng)的時(shí)候,中斷該如何添加。我現(xiàn)在遇到一個(gè)問(wèn)題,就是在連續(xù)轉(zhuǎn)動(dòng)的時(shí)候,一直有中斷,但是沒(méi)有數(shù)據(jù),必須停止運(yùn)動(dòng),才會(huì)產(chǎn)生數(shù)據(jù)。請(qǐng)問(wèn)要怎么解決。
2023-12-29 07:27:52
用laBVIEW簡(jiǎn)單控制伺服電機(jī)正/反轉(zhuǎn),并讀取轉(zhuǎn)動(dòng)圈數(shù),硬件需求中必須要運(yùn)動(dòng)控制卡嗎?或者要用到什么類型的運(yùn)動(dòng)控制卡。轉(zhuǎn)動(dòng)速度在0.5-1圈/秒。
2018-03-12 09:49:13
發(fā)出對(duì)應(yīng)數(shù)量的脈沖,這樣,和伺服電機(jī)接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來(lái),系統(tǒng)就會(huì)知道發(fā)了多少脈沖給伺服電機(jī),同時(shí)又收了多少脈沖回來(lái),這樣,就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位。伺服...
2021-06-28 07:13:40
伺服電機(jī)的工作原理交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)在功能上的區(qū)別永磁交流伺服電機(jī)同直流伺服電動(dòng)機(jī)比較的主要優(yōu)點(diǎn)
2021-01-28 06:13:25
交流伺服電機(jī)和步進(jìn)電機(jī)的原理區(qū)別步進(jìn)電機(jī)原理: 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)換成角位移的執(zhí)行機(jī)構(gòu),當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(步距角),它的旋轉(zhuǎn)是以
2021-07-12 08:55:51
伺服電機(jī)分為哪幾大類?交流伺服電機(jī)的優(yōu)缺點(diǎn)是什么?直流伺服電機(jī)的優(yōu)缺點(diǎn)是什么?
2021-06-28 09:33:31
高壓伺服電機(jī)有哪些優(yōu)點(diǎn)及缺點(diǎn)?低壓伺服電機(jī)和高壓伺服電機(jī)有哪些不同之處?
2021-09-30 07:10:06
用運(yùn)動(dòng)卡附帶的labview程序給驅(qū)動(dòng)器發(fā)送指令,能使伺服電機(jī)轉(zhuǎn)動(dòng)。但是當(dāng)調(diào)用這個(gè)程序發(fā)送指令時(shí),伺服電機(jī)卻不動(dòng),似乎驅(qū)動(dòng)器沒(méi)有接受到脈沖,這是什么原因?求高手解答,急,感謝啦。
2015-12-29 21:47:25
前言 上一節(jié)已經(jīng)成功手動(dòng)將工程修改成絕對(duì)式位置傳感器方案FOC,有些朋友可能按照上面的操作電機(jī)已經(jīng)成功轉(zhuǎn)動(dòng)起來(lái)了,可能有些朋友的還是有點(diǎn)問(wèn)題,電機(jī)轉(zhuǎn)動(dòng)不起來(lái)有很多因素,如接線相序不對(duì),位置不對(duì)
2021-09-16 06:18:58
圖像識(shí)別莊稼植物濃密情況,控制一個(gè)伺服電機(jī)轉(zhuǎn)動(dòng)特定的角度應(yīng)該從那方面學(xué)起?
2021-09-30 06:00:38
如何使用LinuxCNC通過(guò)命令行來(lái)控制伺服電機(jī)轉(zhuǎn)動(dòng)?
2021-09-28 06:26:56
如何實(shí)現(xiàn)伺服電機(jī)轉(zhuǎn)動(dòng)固定角度呢?然后又停下來(lái)?
2021-09-24 06:37:51
、伺服輸出的編碼器信號(hào)線。復(fù)查接線沒(méi)有錯(cuò)誤后,電機(jī)和控制卡(以及PC)上電。此時(shí)電機(jī)應(yīng)該不動(dòng),而且可以用外力輕松轉(zhuǎn)動(dòng),如果不是這樣,檢查使能信號(hào)的設(shè)置與接線。用外力轉(zhuǎn)動(dòng)電機(jī),檢查控制卡是否可以正確檢測(cè)
2015-12-29 11:12:23
:在控制信號(hào)發(fā)出之前,轉(zhuǎn)子靜止不動(dòng);當(dāng)控制信號(hào)發(fā)出時(shí),轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)控制信號(hào)消失時(shí),轉(zhuǎn)子能即時(shí)停轉(zhuǎn)。因此伺服電機(jī)指的是隨時(shí)跟隨命令進(jìn)行動(dòng)作的一種電機(jī),是以其工作性質(zhì)命名的,概念上和“直流電機(jī)
2018-11-12 15:55:11
信號(hào)則會(huì)將偏差減至最低伺服電機(jī):靠伺服控制電路來(lái)控制電機(jī)的轉(zhuǎn)速,通過(guò)傳感器來(lái)控制轉(zhuǎn)動(dòng)位置。所以位置控制十分精確。而轉(zhuǎn)速也是可變的。舵機(jī)(電子舵機(jī)):舵機(jī)的主要組成部分為伺服電機(jī)。其中包含伺服電機(jī)
2021-06-28 08:46:34
步進(jìn)電機(jī)與伺服電機(jī)的區(qū)別,步進(jìn)電機(jī): 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(稱為“步距角”),它的旋轉(zhuǎn)是以
2021-07-12 08:59:24
伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給驅(qū)動(dòng)器,驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度。伺服電機(jī)
2021-06-28 07:27:55
的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(稱為“步距角”),它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。 可以通過(guò)控制脈沖個(gè)數(shù)來(lái)控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)可以通過(guò)控制脈沖頻率來(lái)控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而達(dá)到調(diào)速的目的。伺服電機(jī):伺服電機(jī)內(nèi)部
2021-06-28 09:31:00
怎樣使用LinuxCNC通過(guò)命令行來(lái)控制伺服電機(jī)轉(zhuǎn)動(dòng)?有哪些知識(shí)是必須要了解的
2021-06-28 07:46:10
伺服電機(jī)是一種根據(jù)控制信號(hào)確定軸轉(zhuǎn)動(dòng)位置的電機(jī),通常用于通過(guò)調(diào)整襟翼來(lái)控制遙控飛機(jī),進(jìn)行無(wú)人機(jī)飛行定位,在流量控制中用于閥門(mén)控制,或用于連續(xù)驅(qū)動(dòng)機(jī)器人的輪子。它們可用來(lái)定位或調(diào)整任何您所能想到的東西
2018-07-13 10:27:51
什么是伺服電機(jī)
伺服電機(jī):是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的
2009-04-10 12:53:513678 交流伺服電機(jī)的工作原理
伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電
2009-10-25 14:33:493771 伺服電機(jī)步進(jìn)電機(jī)區(qū)別
伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)
2010-01-09 20:24:1235775 伺服電機(jī)工作原理
伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給
2010-01-09 21:09:463199 伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給驅(qū)動(dòng)器,驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度。伺服電機(jī)的精度決定于編碼器的精度(線數(shù))。
2017-03-08 11:07:5112433 伺服驅(qū)動(dòng)系統(tǒng)是一種以機(jī)械位置或角度作為控制對(duì)象的自動(dòng)控制系統(tǒng),例如數(shù)控機(jī)床等。伺服系統(tǒng)中的驅(qū)動(dòng)電機(jī)要求具有響應(yīng)速度快、定位準(zhǔn)確、轉(zhuǎn)動(dòng)慣量( 機(jī)電系統(tǒng)中的伺服電機(jī)的轉(zhuǎn)動(dòng)慣量較大,為了能夠和絲杠等機(jī)械部件直接相連,也為了得到極高的響應(yīng)速度,伺服電機(jī)有一種專門(mén)的小慣量電機(jī)。
2017-06-08 10:13:2016740 伺服一詞源于希臘語(yǔ)奴隸的意思。伺服電機(jī)可以理解為絕對(duì)服從控制信號(hào)指揮的電機(jī):在控制信號(hào)發(fā)出之前,轉(zhuǎn)子靜止不動(dòng);當(dāng)控制信號(hào)發(fā)出時(shí),轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)控制信號(hào)消失時(shí),轉(zhuǎn)子能即時(shí)停轉(zhuǎn)。 伺服電機(jī)是自動(dòng)控制
2017-09-20 09:44:32 19
19 ,這樣,和伺服電機(jī)接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來(lái),系統(tǒng)就會(huì)知道發(fā)了多少脈沖給伺服電機(jī),同時(shí)又收了多少脈沖回來(lái),這樣,就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位,可以達(dá)到0.001mm。直流伺服電機(jī)分為
2017-09-23 16:26:240 BSH系列電機(jī)是自身轉(zhuǎn)動(dòng)慣量低的交流同步伺服電機(jī),特別設(shè)計(jì)用于高動(dòng)態(tài)的定位任務(wù)。
驅(qū)動(dòng)系統(tǒng)由伺服電機(jī)和附帶的驅(qū)動(dòng)放大器組成。僅當(dāng)電機(jī)和驅(qū)動(dòng)放大器相互協(xié)調(diào)時(shí),才會(huì)實(shí)現(xiàn)理想性能。
2017-09-26 14:29:194 交流伺服電機(jī)的工作原理:伺服系統(tǒng)- -般由伺服放大器和伺服電機(jī)構(gòu)成。伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,伺服放大器控制的U,V,W 三相電形成電磁場(chǎng),轉(zhuǎn)子在此磁場(chǎng)的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給驅(qū)動(dòng)器,驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度。伺服電機(jī)的精度決定于編碼器的分辨率。
2017-10-17 09:28:1125 伺服驅(qū)動(dòng)系統(tǒng)(Servo System)簡(jiǎn)稱伺服系統(tǒng),是一種以機(jī)械位置或角度作為控制對(duì)象的自動(dòng)控制系統(tǒng),例如數(shù)控機(jī)床等。使用在伺服系統(tǒng)中的驅(qū)動(dòng)電機(jī)要求具有響應(yīng)速度快、定位準(zhǔn)確、轉(zhuǎn)動(dòng)慣量( 使用在機(jī)電
2017-11-10 16:05:0111711 慣量就是剛體繞軸轉(zhuǎn)動(dòng)的慣性的度量,轉(zhuǎn)動(dòng)慣量是表征剛體轉(zhuǎn)動(dòng)慣性大小的物理量。它與剛體的質(zhì)量、質(zhì)量相對(duì)于轉(zhuǎn)軸的分布有關(guān)。(剛體是指 理想狀態(tài)下的不會(huì)有任何變化的物體),選擇的時(shí)候遇到電機(jī)慣量,也是伺服
2018-02-05 11:23:5357398 伺服電機(jī)是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的伺服電機(jī),屬于功率很小的微特電機(jī)。伺服電機(jī)分為直流伺服電機(jī)和交流伺服電機(jī),以永磁式直流伺服電機(jī)和并激式直流伺服電機(jī)最為常用。
2018-04-02 15:47:2350709 因?yàn)椋?b class="flag-6" style="color: red">伺服電機(jī)本身具備發(fā)出脈沖的功能,所以伺服電機(jī)每旋轉(zhuǎn)一個(gè)角度,都會(huì)發(fā)出對(duì)應(yīng)數(shù)量的脈沖,這樣,和伺服電機(jī)接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來(lái),系統(tǒng)就會(huì)知道發(fā)了多少脈沖給伺服電機(jī),同時(shí)又收了多少脈沖回來(lái),這樣,就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位,可以達(dá)到0.001mm。
2018-04-12 15:06:2613695 伺服電機(jī)因?yàn)殚L(zhǎng)期連續(xù)不斷使用或者使用者操作不當(dāng),會(huì)經(jīng)常發(fā)生電機(jī)故障,維修又相對(duì)復(fù)雜的。小編收集了伺服電機(jī)發(fā)生的13種常見(jiàn)的故障問(wèn)題的維修方法,供大家學(xué)習(xí)借鑒。
2018-08-04 08:51:1816481 “伺服”一詞源于希臘語(yǔ)“奴隸”的意思。“伺服電機(jī)”可以理解為絕對(duì)服從控制信號(hào)指揮的電機(jī):在控制信號(hào)發(fā)出之前,轉(zhuǎn)子靜止不動(dòng);當(dāng)控制信號(hào)發(fā)出時(shí),轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)控制信號(hào)消失時(shí),轉(zhuǎn)子能即時(shí)停轉(zhuǎn)。伺服電機(jī)是自動(dòng)控制裝置中被用作執(zhí)行元件的微特電機(jī),其功能是將電信號(hào)轉(zhuǎn)換成轉(zhuǎn)軸的角位移或角速度。
2018-09-23 17:51:0024565 “伺服”一詞源于希臘語(yǔ)“奴隸”的意思。“伺服電機(jī)”可以理解為絕對(duì)服從控制信號(hào)指揮的電機(jī):在控制信號(hào)發(fā)出之前,轉(zhuǎn)子靜止不動(dòng);當(dāng)控制信號(hào)發(fā)出時(shí),轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)控制信號(hào)消失時(shí),轉(zhuǎn)子能即時(shí)停轉(zhuǎn)。
2018-09-30 09:28:3322410 伺服電機(jī)因?yàn)殚L(zhǎng)期連續(xù)不斷使用或者使用者操作不當(dāng),會(huì)經(jīng)常發(fā)生電機(jī)故障,維修又相對(duì)復(fù)雜的。
2018-11-28 15:36:4233618 日本富士伺服電機(jī)完好不轉(zhuǎn)動(dòng)是什么問(wèn)題? 通電后伺服電機(jī)不能轉(zhuǎn)動(dòng),但無(wú)異響,也無(wú)異味和冒煙。 1.故障原因 ①電源未通(至少兩相未通); ②熔絲熔斷(至少兩相熔斷); ③過(guò)流繼電器調(diào)得過(guò)小; ④控制
2020-06-28 17:16:471332 伺服電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)伺服電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(即角)。您可以通過(guò)控制脈沖個(gè)數(shù)來(lái)控制角位移量,從而達(dá)到準(zhǔn)確
2019-10-17 16:46:56724 作為伺服電機(jī)中最主要的磨損件,一半以上伺服電機(jī)故障通常都?xì)w因于軸承問(wèn)題。其具體表現(xiàn)多種多樣,輕則電機(jī)轉(zhuǎn)動(dòng)時(shí)產(chǎn)生抖動(dòng)、異響等,重則導(dǎo)致電機(jī)轉(zhuǎn)軸卡死。
2019-10-31 10:15:325113 ,產(chǎn)生糾正脈沖,并驅(qū)動(dòng)電機(jī)正向或反向地轉(zhuǎn)動(dòng),使齒輪組的輸出位置與期望值相符,令糾正脈沖趨于為0,從而達(dá)到使伺服電機(jī)精確定位與定速的目的。
2020-07-29 10:52:497392 伺服電機(jī)的使用范圍很多,想要弄清楚伺服電機(jī)會(huì)在什么地方用?那就的從原理上來(lái)說(shuō)一下電機(jī)的功能。
2020-08-25 14:58:009373 伺服的結(jié)構(gòu)是怎樣的?一個(gè)最簡(jiǎn)易的伺服控制單元,就是一個(gè)伺服電機(jī)加伺服控制器,今天就來(lái)解析下伺服電機(jī)與伺服控制器。
2020-09-24 10:54:3412381 
因?yàn)椋?b class="flag-6" style="color: red">伺服電機(jī)本身具備發(fā)出脈沖的功能,所以伺服電機(jī)每旋轉(zhuǎn)一個(gè)角度,都會(huì)發(fā)出對(duì)應(yīng)數(shù)量的脈沖,這樣,和伺服電機(jī)接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來(lái),系統(tǒng)就會(huì)知道發(fā)了多少脈沖給伺服電機(jī),同時(shí)又收了多少脈沖回來(lái),這樣,就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位,可以達(dá)到0.001mm。
2020-11-26 10:31:185551 “伺服”一詞源于希臘語(yǔ)“奴隸”的意思。“伺服電機(jī)”可以理解為絕對(duì)服從控制信號(hào)指揮的電機(jī):在控制信號(hào)發(fā)出之前,轉(zhuǎn)子靜止不動(dòng);當(dāng)控制信號(hào)發(fā)出時(shí),轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)控制信號(hào)消失時(shí),轉(zhuǎn)子能即時(shí)停轉(zhuǎn)。
2020-12-14 20:26:24164 步進(jìn)電機(jī)和伺服電機(jī)在工業(yè)傳動(dòng)控制領(lǐng)域都是重要的控制部件,應(yīng)用面廣泛。但是步進(jìn)電機(jī)和伺服電機(jī)有什么不同呢?
2020-12-14 21:28:351082 “伺服電機(jī)”可以理解為絕對(duì)服從控制信號(hào)指揮的電機(jī):在控制信號(hào)發(fā)出之前,轉(zhuǎn)子靜止不動(dòng);當(dāng)控制信號(hào)發(fā)出時(shí),轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)控制信號(hào)消失時(shí),轉(zhuǎn)子能即時(shí)停轉(zhuǎn)。
2020-12-26 08:33:072965 “伺服”一詞源于希臘語(yǔ)“奴隸”的意思。“伺服電機(jī)”可以理解為絕對(duì)服從控制信號(hào)指揮的電機(jī):在控制信號(hào)發(fā)出之前,轉(zhuǎn)子靜止不動(dòng);當(dāng)控制信號(hào)發(fā)出時(shí),轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)控制信號(hào)消失時(shí),轉(zhuǎn)子能即時(shí)停轉(zhuǎn)。
2021-02-20 06:01:2110 直流伺服電機(jī)和交流伺服電機(jī)的區(qū)別有哪些?我們都知道在工廠,會(huì)用到大量的電動(dòng)機(jī)械進(jìn)行操作。而這些操作都依賴于大功率電動(dòng)機(jī),這些電動(dòng)機(jī)需要進(jìn)行連續(xù)數(shù)月數(shù)年的漫長(zhǎng)工作,因此選擇與機(jī)械設(shè)備合適的電動(dòng)機(jī)
2021-04-30 14:14:0215492 三相380V的電機(jī)改成三相220V的方法介紹。
2021-06-16 10:39:3427 西門(mén)子伺服電機(jī)是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。西門(mén)子伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的西門(mén)子伺服電機(jī),屬于功率很小的微特電機(jī),以永磁式直流
2021-07-19 10:18:576215 伺服電機(jī)中的伺服簡(jiǎn)單一點(diǎn)來(lái)說(shuō)就是跟蹤的意思。
2021-08-26 16:10:4314862 率。伺服電機(jī)通常在兩個(gè)方向上均只能轉(zhuǎn)動(dòng)90°,即總共180°。例如,采用直流電工作時(shí),軸位置控制會(huì)使用PWM使傳動(dòng)軸沿順時(shí)針或逆時(shí)針?lè)较蛐D(zhuǎn),具體取決于信號(hào)的脈沖寬度,如下圖所示: 使用1.5ms脈沖時(shí),將軸設(shè)為90度的位置(即中間位置)。
2021-10-11 15:56:249643 stm32單片機(jī)控制伺服電機(jī)轉(zhuǎn)動(dòng)固定角度在用伺服電機(jī)進(jìn)行二維平臺(tái)移動(dòng)時(shí),會(huì)涉及讓二維平臺(tái)移動(dòng)一個(gè)步長(zhǎng)的情況,落實(shí)到伺服電機(jī)上,就是讓伺服電機(jī)轉(zhuǎn)動(dòng)一個(gè)固定的角度。所以本文說(shuō)說(shuō)讓伺服電機(jī)轉(zhuǎn)動(dòng)固定角度
2021-11-18 20:21:0179 伺服電機(jī)是伺服系統(tǒng)的主體部分,負(fù)責(zé)位移運(yùn)動(dòng),常見(jiàn)的伺服電機(jī)包括直流類型的以及交流類型的,它們都可以添加抱閘設(shè)計(jì)。那給伺服電機(jī)抱閘有什么意義呢?是不是所有的伺服電機(jī)都需要抱閘呢?我們簡(jiǎn)單的來(lái)說(shuō)說(shuō)。
2022-06-14 14:06:114275 伺服電機(jī)是一種根據(jù)控制信號(hào)確定軸轉(zhuǎn)動(dòng)位置的電機(jī),通常用于通過(guò)調(diào)整襟翼來(lái)控制遙控飛機(jī),進(jìn)行無(wú)人機(jī)飛行定位,在流量控制中用于閥門(mén)控制,或用于連續(xù)驅(qū)動(dòng)機(jī)器人的輪子。
2022-08-25 10:26:221951 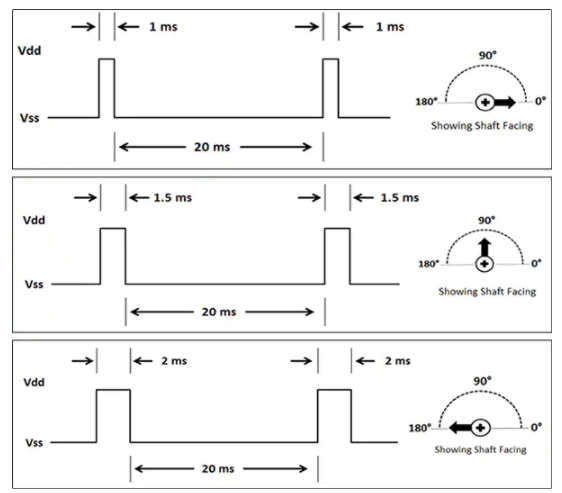
伺服電機(jī)靠脈沖來(lái)定位,伺服電機(jī)接收到1個(gè)脈沖,就會(huì)旋轉(zhuǎn)1個(gè)脈沖對(duì)應(yīng)的角度。電機(jī)每旋轉(zhuǎn)一個(gè)角度,編碼器都會(huì)發(fā)出對(duì)應(yīng)數(shù)量的反饋脈沖,反饋脈沖和伺服驅(qū)動(dòng)器接收的脈沖形成閉環(huán)控制,這樣伺服驅(qū)動(dòng)器就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位。
2022-10-19 08:58:381177 有刷電機(jī)的結(jié)構(gòu)及轉(zhuǎn)動(dòng)原理
2023-01-11 10:04:201019 伺服電機(jī)的作用是驅(qū)動(dòng)控制對(duì)象。被控對(duì)象的轉(zhuǎn)距和轉(zhuǎn)速受信號(hào)電壓控制,信號(hào)電壓的大小和極性改變時(shí),電機(jī)的轉(zhuǎn)動(dòng)速度和方向也跟著變化。
2023-03-01 15:42:005389 伺服電機(jī):是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的伺服電機(jī),屬于功率很小的微特電機(jī),以永磁式直流伺服電機(jī)和并激式直流伺服電機(jī)最為常用。
2023-03-01 15:51:582870 編碼器安裝于伺服電機(jī)尾部,它和電流環(huán)沒(méi)有任何聯(lián)系,它采樣來(lái)自于電機(jī)的轉(zhuǎn)動(dòng)而不是電機(jī)電流,和電流環(huán)的輸入、輸出、反饋都沒(méi)有任何聯(lián)系。
2023-03-03 16:02:122017 伺服電機(jī)的型號(hào)通常由一串字母和數(shù)字組成,不同廠家的型號(hào)表現(xiàn)形式有所不同。以下是一些常見(jiàn)的伺服電機(jī)型號(hào)表示方法:
型號(hào)中含有電機(jī)的參數(shù):一些廠家的伺服電機(jī)型號(hào)中會(huì)包含電機(jī)的參數(shù),如電壓、功率
2023-03-07 15:10:2110803 伺服電機(jī)通常由以下幾個(gè)主要部分組成:
電機(jī)部分:伺服電機(jī)的電機(jī)部分一般由轉(zhuǎn)子、定子、繞組、磁極等部件組成。電機(jī)的類型包括直流伺服電機(jī)、交流伺服電機(jī)、步進(jìn)伺服電機(jī)等,每種類型的電機(jī)在結(jié)構(gòu)和控制方式上都有所不同。
2023-03-07 15:14:586200 步進(jìn)電機(jī)和伺服電機(jī)都是常見(jiàn)的電動(dòng)機(jī)種類,它們有著不同的工作原理和應(yīng)用場(chǎng)合。
步進(jìn)電機(jī)是一種定角度運(yùn)轉(zhuǎn)的電動(dòng)機(jī),它的轉(zhuǎn)動(dòng)是根據(jù)外部提供的脈沖信號(hào)來(lái)實(shí)現(xiàn)的。步進(jìn)電機(jī)具有精度高、控制簡(jiǎn)單、適合低速運(yùn)動(dòng)等特點(diǎn),適用于需要高精度定位控制的場(chǎng)合,如印刷機(jī)、繪圖儀、數(shù)碼相機(jī)等。
2023-03-07 17:59:044524 步進(jìn)電機(jī)的旋轉(zhuǎn)角度是由控制信號(hào)驅(qū)動(dòng),每個(gè)控制信號(hào)都會(huì)使步進(jìn)電機(jī)轉(zhuǎn)動(dòng)一定的角度,因此步進(jìn)電機(jī)的運(yùn)動(dòng)是“離散”的。而伺服電機(jī)則是通過(guò)控制電機(jī)的電流或電壓來(lái)控制電機(jī)的旋轉(zhuǎn)角度,因此伺服電機(jī)的運(yùn)動(dòng)是“連續(xù)”的。
2023-03-09 10:44:593511 直流伺服電機(jī)和交流伺服電機(jī)都是常見(jiàn)的精密控制電機(jī),但它們之間有一些區(qū)別,如下所示:
原理不同:直流伺服電機(jī)是基于直流電源供電的,通過(guò)改變電極之間的磁場(chǎng)來(lái)控制電機(jī)的轉(zhuǎn)速和方向;而交流伺服電機(jī)是基于交流電源供電的,通過(guò)改變電樞中電流的方向和大小來(lái)控制電機(jī)的轉(zhuǎn)速和方向。
2023-03-10 13:46:256734 伺服電動(dòng)機(jī)分為直流伺服電機(jī)和交流伺服電機(jī)。直流伺服電機(jī)比較便宜,交流伺服電機(jī)比較常用。
2023-04-04 15:05:451422 “伺服”一詞源于希臘語(yǔ)“奴隸”的意思。“伺服電機(jī)”可以理解為絕對(duì)服從控制信號(hào)指揮的電機(jī):在控制信號(hào)發(fā)出之前,轉(zhuǎn)子靜止不動(dòng);當(dāng)控制信號(hào)發(fā)出時(shí),轉(zhuǎn)子立即轉(zhuǎn)動(dòng);當(dāng)控制信號(hào)消失時(shí),轉(zhuǎn)子能即時(shí)停轉(zhuǎn)。
2023-05-10 10:56:581472 的連續(xù)旋轉(zhuǎn)伺服器。使用微控制器控制伺服電機(jī)是一種常見(jiàn)的做法。然而,在這個(gè)伺服電機(jī)控制電路中,我們將使用定時(shí)器芯片IC555來(lái)控制它的方向。
2023-06-18 09:58:21407 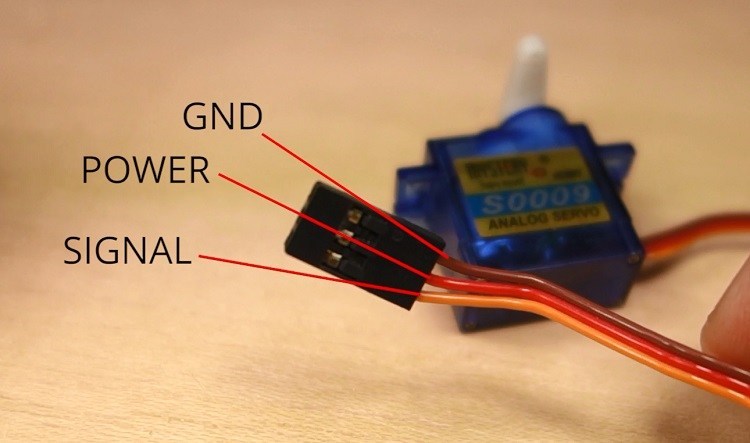
伺服電機(jī)中的慣量、高低慣量、小中大慣量都是什么,在本文就給大家詳細(xì)講解下。伺服電機(jī)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī)。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號(hào)控制,并能快速反應(yīng),在自動(dòng)控制系統(tǒng)中,用作執(zhí)行
2023-02-21 15:25:012583 
伺服電機(jī)因?yàn)殚L(zhǎng)期連續(xù)不斷使用或者使用者操作不當(dāng),會(huì)經(jīng)常發(fā)生電機(jī)故障,維修又相對(duì)復(fù)雜的。小編收集了伺服電機(jī)發(fā)生的13種常見(jiàn)的故障問(wèn)題的維修方法,供大家學(xué)習(xí)借鑒。
2023-08-07 11:20:232005 伺服電機(jī)在轉(zhuǎn)動(dòng)的過(guò)程中還有停下后老是顫動(dòng)怎么辦?
用伺服電機(jī)帶動(dòng)轉(zhuǎn)盤(pán)轉(zhuǎn)動(dòng),每轉(zhuǎn)180度停一次,但是停下后轉(zhuǎn)盤(pán)老是顫動(dòng),好像伺服電機(jī)的軸鎖的不是很牢固,怎么辦呢?
這個(gè)好象慣量大,可以更換大功率電機(jī)或加減速機(jī)。
2023-08-23 11:31:422909 什么是伺服電機(jī)?伺服是一種電磁裝置,利用負(fù)反饋機(jī)制將電信號(hào)轉(zhuǎn)換為受控運(yùn)動(dòng)。基本上,伺服系統(tǒng)的行為類似于執(zhí)行器,提供對(duì)速度、加速度和線性或角度位置的精確控制。它由四件事組成:直流電機(jī)、位置傳感器、齒輪
2023-08-30 08:08:521676 交流伺服電機(jī)是一種將電能轉(zhuǎn)化為機(jī)械能的裝置。它主要由一個(gè)定子和一個(gè)轉(zhuǎn)子組成,定子中通入交流電后會(huì)產(chǎn)生旋轉(zhuǎn)磁場(chǎng),轉(zhuǎn)子在旋轉(zhuǎn)磁場(chǎng)的作用下會(huì)轉(zhuǎn)動(dòng)并輸出機(jī)械能。交流伺服電機(jī)具有高精度、高響應(yīng)速度和高穩(wěn)定性
2023-12-11 17:20:09430 伺服電機(jī)速度增益的作用? 伺服電機(jī)速度增益是伺服控制系統(tǒng)中的一個(gè)重要參數(shù),它對(duì)于電機(jī)的運(yùn)行速度和穩(wěn)定性起著關(guān)鍵作用。本文將詳盡、詳實(shí)、細(xì)致地介紹伺服電機(jī)速度增益的作用。 一、伺服電機(jī)的基本原理 伺服
2023-12-25 13:57:55560 什么是伺服電機(jī)的原點(diǎn)設(shè)置?伺服電機(jī)零點(diǎn)和原點(diǎn)的區(qū)別 伺服電機(jī)的原點(diǎn)設(shè)置,簡(jiǎn)單來(lái)說(shuō),就是確定電機(jī)的起始位置或參考位置。在使用伺服電機(jī)控制系統(tǒng)時(shí),需要將電機(jī)的位置與設(shè)定的參考位置進(jìn)行對(duì)齊,以確保精準(zhǔn)
2023-12-25 13:57:591135 有關(guān)),當(dāng)一個(gè)新的體系,參數(shù)不能工作時(shí),首要設(shè)定方位增益,保證電機(jī)無(wú)噪音狀況下,盡量設(shè)大些,轉(zhuǎn)動(dòng)慣量比也非常重要,可經(jīng)過(guò)自學(xué)習(xí)設(shè)定的數(shù)來(lái)參考,然后設(shè)定速度增益和速度積分時(shí)間,保證在低速運(yùn)轉(zhuǎn)時(shí)連續(xù),方位精度受控即可。 (1)方位份額增
2024-01-05 08:39:44222 ,這樣,和伺服電機(jī)接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來(lái),系統(tǒng)就會(huì)知道發(fā)了多少脈沖給伺服電機(jī),同時(shí)又收了多少脈沖回來(lái),這樣,就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位,可以達(dá)到0.001mm。
2024-01-20 09:44:56345 直線電機(jī)優(yōu)缺點(diǎn)以及與伺服電機(jī)的區(qū)別? 直線電機(jī)是一種將電能轉(zhuǎn)變?yōu)橹本€力的電動(dòng)機(jī),與傳統(tǒng)的旋轉(zhuǎn)電機(jī)不同。它由勵(lì)磁部分和線性運(yùn)動(dòng)部分組成,可以直接產(chǎn)生直線運(yùn)動(dòng),不需要中間的轉(zhuǎn)動(dòng)機(jī)構(gòu)。直線電機(jī)具有許多優(yōu)點(diǎn)
2024-02-05 10:32:17574
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論