自行開發了一套基于 PI調節器的無速度傳感器矢量控制系統,并且在自行搭建的實驗平臺進行了調速實驗,在實驗過程中,運用了 Matlab與 DSP混合編程的調試方法,實驗結果表明,采用 Matlab調試
2018-11-14 15:23:46
本文小結一下,電機無位置控制中的一種--滑模觀測器的設計,還有自適應觀測器的設計等其他內容,等有時間之后再來總結。現代永磁同步電機控制原理及MATLAB仿真永磁同步電機無位置傳感器控制系統的研究
2021-08-30 06:33:08
估計反電動勢波形,然後利用反三角函數取出轉子數據。在實際當中不少的干擾影響也疊加在定子電壓波形上,須先行將之濾出,才可以抽出在數據中所包含的轉子位置資料。在實現無傳感器電動機控制上DSP是完全符合高速運算要求的最佳之選。
2016-01-25 17:31:36
大轉矩場合。產品特點:高性能、快速加減速、控制精度高額定負載條件下,0.1秒任意加、減速,自動限流,自動穩壓,保證無故障最優控制無速度傳感器電流矢量控制:轉矩控制精度高;穩速控制精度高低頻帶載能力強
2015-12-01 23:59:53
大轉矩場合。產品特點:高性能、快速加減速、控制精度高額定負載條件下,0.1秒任意加、減速,自動限流,自動穩壓,保證無故障最優控制無速度傳感器電流矢量控制:轉矩控制精度高;穩速控制精度高低頻帶載能力強
2015-08-27 10:57:45
用驅動電機無電流傳感器控制針對傳統電機的矢量控制方法應用于車用驅動電機時,高效工作區窄,反饋閉環控制導致過流等現象問題,提出一種無電流傳感器電機控制方法。根據指令轉矩和電機轉速,直接控制電壓空間矢量的幅值和相位,實現對電機轉矩和轉速的控制。
2016-02-01 11:52:42
一個階段的學習結束了,整理了之前的過程中的學習成果,已經過了工作的年紀,在這里稍微出一下自己做的一套永磁同步電機的教程,從基礎的矢量控制,到應用性較強的MTPA、弱磁控制等,最后深入到無速度傳感器
2021-08-27 07:24:40
矢量控制又稱磁場導向控制(Field Oriented Control, FOC),這是永磁同步電機(PMSM)的主要控制方法,與BLDC的簡單控制策略相比,矢量控制要更為復雜,故需要一套系統的調試
2021-08-27 07:20:39
矢量控制常用的位置傳感器是什么?Hall傳感器的原理是什么?
2021-10-19 07:15:29
近段時間經常有同學和我討論:矢量控制是什么控制方式?雙閉環控制策略就叫做矢量控制嗎?其實剛開始學習難免會對矢量控制的概念有所模糊,具體是對于調制模式和控制方式之間的區別不太清楚。在此具體講述一下
2021-08-27 07:04:28
不足的技術 使用"矢量控制",可以使電機在低速,如(無速度傳感器時)1Hz(對4極電機,其轉速大約為30r/min)時的輸出轉矩可以達到電機在50Hz供電輸出的轉矩(最大約為額定
2016-01-29 10:05:03
IPMSM方程IPMSM的矢量控制系統相比較于IM中矢量控制系統還稍微多了點東西,MTPA控制。在dq坐標系下:IPMSM的轉矩方程并不是由某一軸的單一電流量控制的其中有dq電流的乘積項,因此需要
2021-08-27 06:28:00
Matlab/Simulink中對轉速估計進行建模,最終搭建出基于MRAS的無速度傳感器矢量控制系統,并對其進行仿真驗證。 1、模型參考自適應法的原理MRAS核心是模型參考自適應辨識,主要思想是將含有待估計參數
2016-01-04 15:39:35
1、SVPWM的生成在FOC矢量控制中,Id、Iq 經過PID輸出Vd、Vq。Vd、Vq經過反park變換成Vα、Vβ。再經過Vα、Vβ合成空間參考矢量Uref。那么怎么根據Vα、Vβ確定Uref
2021-09-06 07:58:01
在simulink仿真過程中,發現不帶SVPWM的矢量控制模型,得到的電流波形好,而且d、q軸電流跟隨性能好。 但是加了有SVPWM的矢量控制模型中,d、q軸電流普遍有毛刺,有時候需要加低通濾波器
2021-09-24 22:53:33
的魯棒控制方案。利用高速開關控制動作在控制器的不同結構之間進行切換,使系統的軌跡在狀態空間中沿著選定的開關流形運動。本文提出了一種新的無傳感器矢量控制方案,一方面,該方案克服了速度傳感器的必要性,另一...
2021-09-06 06:02:14
什么是矢量控制時序?
2022-02-11 06:38:40
變頻器VF輸出電壓和頻率成正比,電流大小和相位由負載決定,那么矢量控制時的輸出電壓和電流在數量和相位上有什么緊密聯系的點,能夠實現精準控制輸出和低頻高扭矩輸出?詳細解釋矢量控制的輸出電壓電流聯系以及和負載之間的關系?
2024-02-18 19:58:37
變頻器的三種控制模式,恒壓頻比模式,無速度傳感器矢量模式,有速度傳感器矢量模式,從控制性能和穩定性來說這三種逐漸優良。但是有些不明白的點,變頻器在恒壓頻比控制模式下無論是空載還是滿載在額定頻率下速度
2024-02-02 17:03:56
的影響較小。2) 當調速范圍不大,在1:10的速度范圍內時,常采用無速傳感器的轉速開環矢量控制方式,這時其靜態機械特性已經相當完美;當調速范圍較大,即在低速下也要求具有高動態性能和高轉速精度時,才需要有帶
2014-04-10 14:54:21
的影響較小。2) 當調速范圍不大,在1:10的速度范圍內時,常采用無速傳感器的轉速開環矢量控制方式,這時其靜態機械特性已經相當完美;當調速范圍較大,即在低速下也要求具有高動態性能和高轉速精度時,才需要有帶
2014-05-09 09:31:02
在變頻器控制模式中,有無速度矢量傳感器模式,該模式又分為兩種,無感矢量0和無感矢量1,這兩種模式的本質原理是什么?對變頻器的控制電機性能和系統穩定性響應什么的有什么影響?具體應用上哪種方式更好一點,或者而言這兩種模式的優缺點是什么?更適合用于什么場合?針對不同功率的變頻器和電機?
2024-02-22 21:45:53
誰有DSP2812永磁同步電機矢量控制程序,供我參考一下,謝謝!!!
2016-04-06 12:14:17
著重分析了變頻調速器的空間電壓矢量控制原理和死區補償技術,以及DSP 控制的工程實現。 1 變頻調速器空間電壓矢量控制原理 1.1 變頻調速器 變頻調速器把固定電壓、固定頻率的交流電(工頻電源
2011-07-25 08:55:06
,處理定向定子通量電流。 無傳感器控制 要想在矢量控制模式中運行AC電機,重要的是同步應用電壓的頻率和來自轉子中的永磁轉子通量位置。這樣就產生了無傳感器操作模式,其中,速度和位置算法取代了傳感器
2018-10-31 17:21:52
PMSM無傳感器矢量控制原理PSoC4簡介基于PSoC4的無傳感器矢量控制方案基于PSoC4的設計實例
2021-02-24 06:12:44
大轉矩場合。產品特點:高性能、快速加減速、控制精度高額定負載條件下,0.1秒任意加、減速,自動限流,自動穩壓,保證無故障最優控制無速度傳感器電流矢量控制:轉矩控制精度高;穩速控制精度高低頻帶載能力強
2016-01-16 22:05:55
大轉矩場合。產品特點:高性能、快速加減速、控制精度高額定負載條件下,0.1秒任意加、減速,自動限流,自動穩壓,保證無故障最優控制無速度傳感器電流矢量控制:轉矩控制精度高;穩速控制精度高低頻帶載能力強:SVC/0.5Hz/150%轉矩`
2016-05-30 17:12:11
學號:課 程 設 計題 目異步電機矢量控制MATLAB仿真實驗(矢量控制部分)學 院自動化學院專 業自動化專業班 級姓 名指導教師曹雪蓮2015年1月7日目錄摘要11異步電動機矢量控制原理22坐標
2021-09-03 07:06:48
學號:課 程 設 計題 目異步電機矢量控制MATLAB仿真實驗(矢量控制部分)學 院自動化學院專 業自動化專業班 級姓 名指導教師曹雪蓮2015年1月7日目錄摘要11異步電動機矢量控制原理22坐標
2021-09-06 06:29:37
異步電機的無速度傳感矢量控制設計矢量控制技術在速度和轉矩控制經過了長期的發展,逐漸趨于成熟,這使得在電機領域交流控制可以擁有與直流控制系統一樣甚至更好性能成為可能。由于無速度傳感器矢量控制沒有速度
2016-01-21 15:40:59
開發了一套基于PI 調節器的無速度傳感器矢量控制系統,并且在自行搭建的實驗平臺進行了調速實驗,在實驗過程中,運用 了Matlab 與DSP 混合編程的調試方法,實驗結果表明,采用Matlab 調試
2018-11-02 15:52:03
【實例簡介】永磁同步電機矢量控制matlab仿真 各個環節的源碼包括 dq變換 svpwm等【實例截圖】【核心代碼】│ abc_to_alpha_beta.m│ abc_to_dq.m
2021-08-31 06:14:18
永磁同步電機的矢量控制原理是什么?永磁同步電機的矢量控制進行坐標變換的原因是什么?
2021-10-14 06:21:27
我想用28035做電機PMSM的矢量控制(FOC),但電機上只安裝了三個霍爾傳感器,沒有編碼器,請問這樣可以做FOC算法嗎?因為之前看到過說做FOC一定要用到編碼器.不知道有沒有了解的。
2018-12-04 11:22:40
電機的反電動勢(電動勢)來預測轉子位置。無傳感器控制對于像風扇和泵這樣的低成本變速應用至關重要。在采有 BLDC 電機時,冰箱和空調壓縮機也需要無傳感器控制。空載時間的插入和補充大多數 BLDC 電機不需要
2020-12-30 07:00:00
感應電動機直接轉矩控制 第5章 三相永磁同步電動機直接轉矩控制 三相永磁同步電動機直接轉矩控制 第6章 無速度傳感器控制與智能控制 無速度傳感器控制與智能控制電機選型經典計算公式、步驟、實例
2020-06-29 15:25:02
之前有朋友反應對電機矢量控制有很大的學習需求,他說缺乏“實干”的書籍,國內暫時并沒有發現太多實用的書籍,這里給大家推薦一本日本一線工程師的電機矢量控制書籍——《無刷直流電機矢量控制技術》,作者江琦雅
2021-08-26 09:54:28
1. 矢量控制常用的位置傳感器在電機磁場定向控制算法中,電機轉子位置的獲取是必要的,在高精度應用場合,通常使用編碼器、旋轉變壓器進行位置反饋,這種方式需要較高的成本。對于一般的應用場合,如電動自行車
2021-06-29 09:06:35
的工作特點對傳統的矢量控制系統進行改進。機車運行條件惡劣,震動強烈且工作環境灰塵多,這些條件對速度傳感器會有很大的危害。所以機車在某些情況下不能使用速度傳感器,在系統設計時要考慮實現無速度傳感器運行
2019-09-29 08:27:31
本章主要講解矢量控制的基礎,并結合自己的手稿推導過程;以及仿真搭建與實現,同時涉及多種與矢量控制相關的先進控制方法,歡迎大家指出其中問題并留言區討論。
2021-08-27 08:04:53
什么是無速度傳感器矢量控制系統?怎樣對無速度傳感器矢量控制系統進行調試?
2021-04-28 06:49:48
Anders Frederiksen內容提要面向電機和功率級動態特性的高級建模技術可以大幅提高電機控制效率,確保根據系統行為的實時變動實行精密控制。通過無傳感器矢量控制技術,設計人員可以增強
2018-10-10 18:16:43
基于PLC分級遞階分布式控制的無速度傳感器矢量控制調速系統:提出了一種實用的基于PLC 分級遞階分布式控制的多電機無速度傳感器矢量控制調速系統設計的新方法。實驗結果表明
2009-06-08 14:01:26 26
26 主要研究的是異步電動機無速度傳感器矢量控制系統,用矢量控制理論和電壓解耦的方法建立了轉差型電壓矢量解耦控制系統。利用模型參考自適應(MRAS) 的方法實現轉速辨識,仿真結
2009-07-01 09:45:4518 根據感應電機無速度傳感器矢量控制、模糊控制及自適應原理,在無速度傳感器矢量控制系統中采用模型參考自適應模糊控制(MR2FAS) 進行感應電機的轉速估計,并與模型參考自適應(MR
2009-07-06 09:07:3518 無速度傳感器矢量控制的系統中,參數的檢測精度很大程度上決定系統的控制精度。文章從異步電機的數學模型出發,從電路分析的角度提出了一種簡單易行的參數辨識算法,實
2009-08-11 08:50:1922 本文提出了一種基于DSP 的隱極電機的無位置傳感器的矢量控制方法。本算法充分利用了隱極電機的特性來進行近似地估計轉子的位置,大大減低了算法的運算量。此外,本算法還
2009-08-12 09:48:0614 基于MATLAB的無速度傳感器矢量控制仿真:設計了參數自調整模糊控制代替常規的PI調節器,構建無速度傳感器異步機矢量控制系統,并運用Matlab\Simulink工具構造異步電動機的矢量
2009-11-18 11:15:4751 基于DSP的異步電動機無速度傳感器矢量控制系統的研究:矢童控制是一種高性能的交流電機控制方法,具有控制轉矩小,電流諧波成分少等優點。介紹了異步電動機無速度傳感器矢
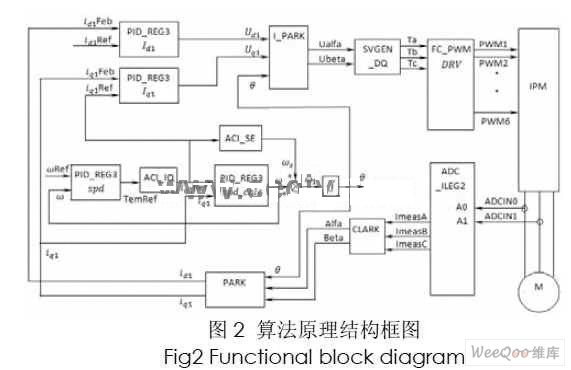
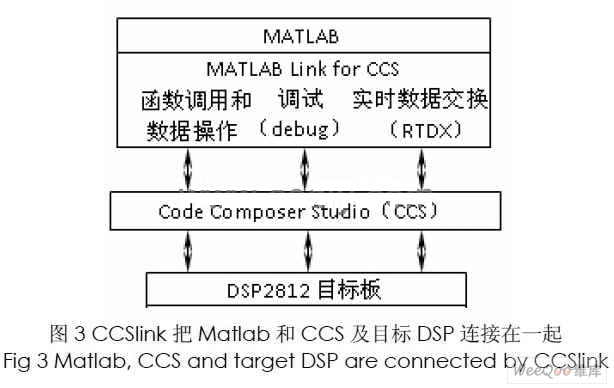
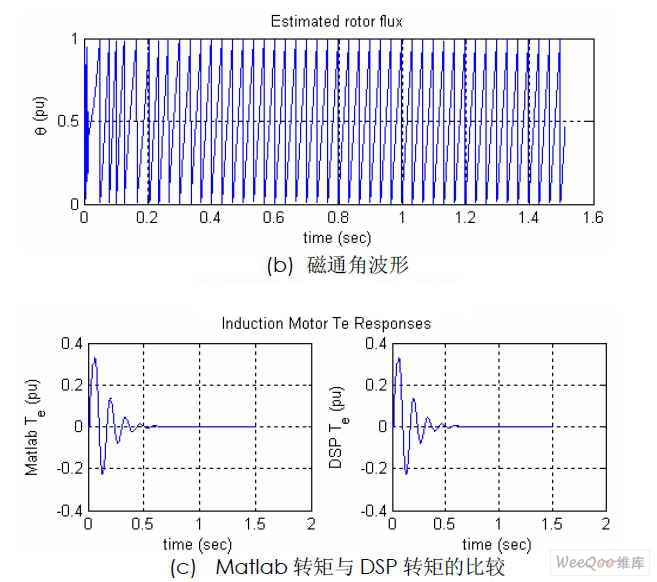
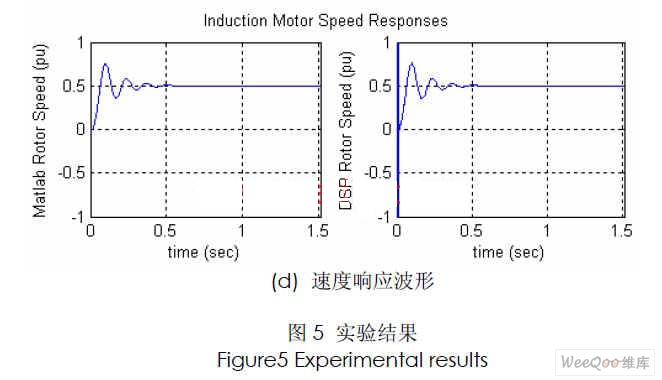
2009-11-18 11:24:0715 本文介紹了一種采用MATLAB及CCS對異步電機無速度傳感器交流調速系統進行調試的方法。應用MATLAB語言強大的分析能力和繪圖功能,與DSP高速運算的優勢相結合,在自行搭建的無傳感器矢
2010-02-24 14:01:3044 基于DSP的異步電機矢量控制系統設計
0 引言
隨著現代控制理論、微處理技術和電力電子技術的不斷發展,基于矢量控制的高性能交流傳動系統得到廣泛
2010-01-22 11:24:23 1983
1983 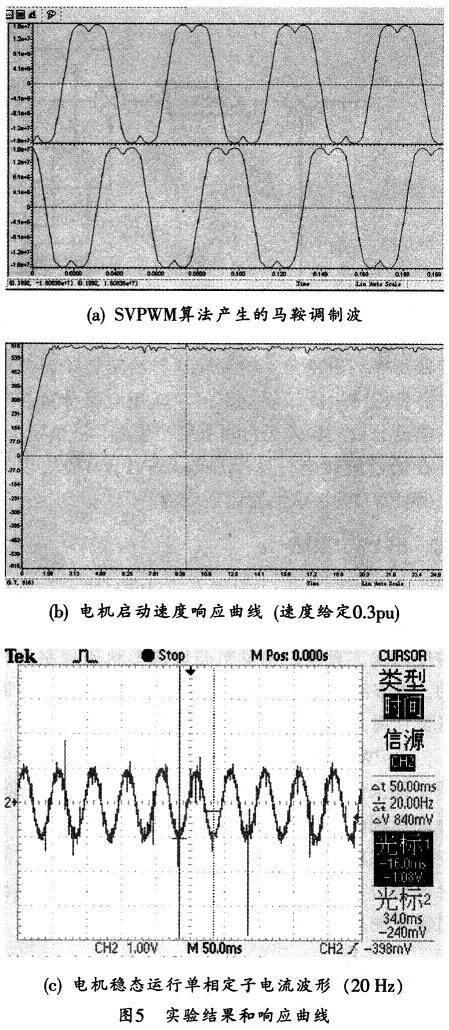
該書介紹了無速度傳感器矢量控制系統的具體電路、工作原理、參數設計和調整方法。此外還介紹了幾種典型的無速度傳感器的速度推算和觀測方案。書末列出了日、法、英、美、徳等國最新無速度傳感器矢量控制變頻器的技術數據和規格,以供讀者參考。
2015-11-05 16:53:370 基于DSP的模糊PID矢量控制變頻器的研究-2010。
2016-04-01 17:27:2433 基于DSP變頻調速系統的對稱電壓空間矢量控制
2016-04-15 18:29:166 基于DSP的SVPWM矢量控制變頻調速系統的研究
2016-04-15 18:29:1610 基于DSP的SVPWM矢量控制變頻系統。
2016-04-15 18:29:1614 基于DSP的SVPWM矢量控制系統的研究
2016-04-15 18:29:1623 基于DSP的全數字矢量控制SVPWM變頻調速系統。
2016-04-18 09:47:495 基于DSP的異步電機無速度傳感器矢量控制系統的研究與實現
2016-04-18 09:47:4921 基于DSP實現對稱SVPWM矢量控制的變頻調速系統。
2016-04-18 09:47:4936 基于通用多電平SVPWM算法的三電平無速度傳感器矢量控制系統
2016-03-30 18:24:1412 基于DSP28335的七相感應電機矢量控制_郭冀嶺
2017-01-08 10:57:067 基于單元串聯的無速度傳感器矢量控制算法研究_黃哲
2017-01-08 10:57:060 一種高性能感應電機無速度傳感器矢量控制策略_常乾坤
2017-01-08 11:28:383 基于非線性磁鏈動態模型的無速度傳感器矢量控制系統_劉和平
2017-01-08 13:38:530 提出了一種實用的基于PLC分級遞階分布式控制的多電機無速度傳感器矢量控制調速系統設計的新方法。
2017-09-08 15:00:4511 基于Matlab-Simulink的永磁同步電機(PMSM)矢量控制仿真
2018-05-05 10:18:4831 基于MATLAB異步電機矢量控制系統的建模與仿真
2018-05-08 10:29:2237 演講題目:《飛思卡爾完善的永磁同步電機無位置傳感器矢量控制解決方案》,演講者:飛思卡爾微控制器方案部高級應用工程師 葉萬富。
2018-06-21 10:30:005588 )分別加以控制,并同時控制兩分量間的幅值和相位,這樣即可等效于直流電機。矢量控制方式又有基于轉差頻率控制的矢量控制方式、無速度傳感器矢量控制方式和有速度傳感器的矢量控制方式等。
2018-07-24 16:09:2237704 
近年來,異步電機的無速度傳感器矢量控制成為研究熱點。目前,異步電機無速度傳感器矢量控制在中高速段已獲得良好的控制性能,但在極低速段(<1Hz)卻仍未實現良好的控制。這是因為常用的異步電機無速度傳感器
2019-09-30 07:57:003893 
方程建立模型參考自適應系統(MRAS)來估計轉子磁鏈, 最后通過Matlab /Simulink仿真與基于DSP的無速度傳感器異步電動機矢量控制實驗進行對比分析, 驗證了該仿真和實際電機控制系統的調試都具有足夠辨識精度, 高動靜態性能和高控制效果。
2019-06-21 15:43:4423 論述了 DSP的發展及其在電機控制中的應用 ,特別介紹了 DSP在感應電動機矢量控制中的應用。
2019-11-04 08:00:007 通過對電壓解耦矢量控制系統的研究,紹了以DSP-TMS320C240為核心的電壓解耦矢量控制系統,詳細分析了矢量控制系統的硬件結構和軟件結構。在完成實驗系統后進行控制實驗, 并對實驗波形進行分析
2021-04-29 10:42:035 提出一種基于模糊神經網絡的模型參考自適應電機轉速辨識方法,將其與 SVPWM調制技術控制的變頻器系統結合起來,組成了一種基于DSP的感應電機無速度傳感器矢量控制系統。具體介紹了其結構及軟硬件的設計。實驗及仿真結果表明,該系統動態性能好,能準確跟蹤電機轉速的變化。
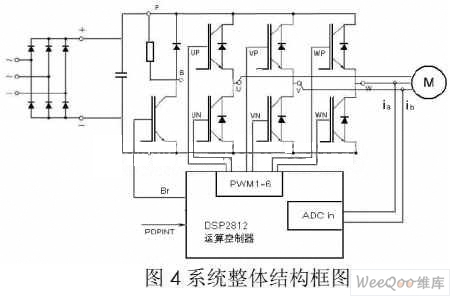
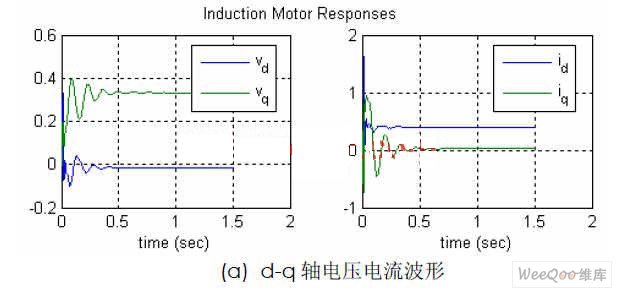
2021-05-06 14:17:2618 以異步電機矢量控制原理為基礎,選用 DSPTMS320F2812作為主控芯片設計了無速度傳感器矢量控制調速系統,介紹了系統的硬件構成及軟件實現。建立了仿真模型,釆用 MATLAB/ Simulink軟件進行了仿真實驗。結果證明,系統具有良好的轉矩轉速特性,可以實現針對電機的無速度傳感器矢量控制。
2021-05-18 10:53:3716 用于超高效電機控制的無位置傳感器矢量控制技術
2021-05-19 08:25:0110 提出一種基于DSP數字信號處理器的雙閉環矢量控制系統實現方案,設計了系統結構及軟硬件設計方案。
2021-06-11 11:55:2428 矢量控制是一種具有高精度的電機控制技術,可以實現電機轉矩、速度和位置的精確控制。基于矢量控制技術的電機控制器能夠精確調節電機的電流、電壓和頻率,以達到最佳性能和效率。
2023-03-28 15:15:029704 異步電機的控制方法可以劃分為矢量控制與標量控制。
在標量控制中,僅對電壓、電流、以及磁鏈等矢量的幅值和旋轉頻率進行控制,如恒壓頻比(VF)控制技術。
在矢量控制中,將矢量的瞬時位置納入控制范疇,如矢量控制(F0C)、直接轉矩控制(DTC)、模型預測控制(MPC) 等高性能控制方
法。
2023-03-29 11:41:271 導讀:本期文章主要介紹異步電機無速度傳感器矢量控制。首先分析無速度傳感器的優勢,然后分次介紹不同的速度估計方法,最后進行MATLAB/Simulink仿真模型搭建,驗證方法的可行性和有效性。 如果
2023-03-29 11:42:460 3. 控制程序描述 介紹本應用筆記的目標軟件。 3.3 控制的內容 3.3.1 配置選項 可以使用RA配置器來配置電機的無傳感器矢量控制模塊的配置選項。生成代碼時,發生更改的選項會自動反映
2023-05-26 23:20:01267 
的作用時間,又可以形成各種PWM波,達到各種不同的控制目的。例如形成開關次數最少的PWM波以減少開關損耗。目前在變頻器中實際應用的矢量控制方式主要有基于轉差頻率控制的矢量控制方式和無速度傳感器的矢量控制方式兩種。
2023-07-04 17:03:361473 RA6T2無傳感器矢量控制應用筆記
2023-08-14 09:49:42110 
RA6T2無傳感器矢量控制應用筆記
2023-08-19 08:08:0098 RA6T2無傳感器矢量控制應用筆記
2023-08-26 08:07:2594 RA6T2無傳感器矢量控制應用筆記
2023-09-04 16:22:52116 RA6T2無傳感器矢量控制應用筆記
2023-09-14 08:07:3599 RA6T2無傳感器矢量控制應用筆記
2023-09-22 08:07:32108 RA6T2無傳感器矢量控制應用筆記
2023-10-10 09:34:17116
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論