從操作系統能否滿足實時性要求來區分,可把操作系統分成分時操作系統和實時操作系統,分時操作系統按照相等的時間片調度進程輪流運行,分時操作系統由調度程序自動計算進程的
2011-11-14 17:39:30 12251
12251 Free 即免費的,RTOS 全稱是 Real Time Operating System,中文就是實時操作系統。注意,RTOS 不是指某一個確定的系統,而是指一類系統。比如 uC/OS,FreeRTOS,RTX,RT-Thread 等這些都是 RTOS 類操作系統。
2022-06-08 09:23:357016 
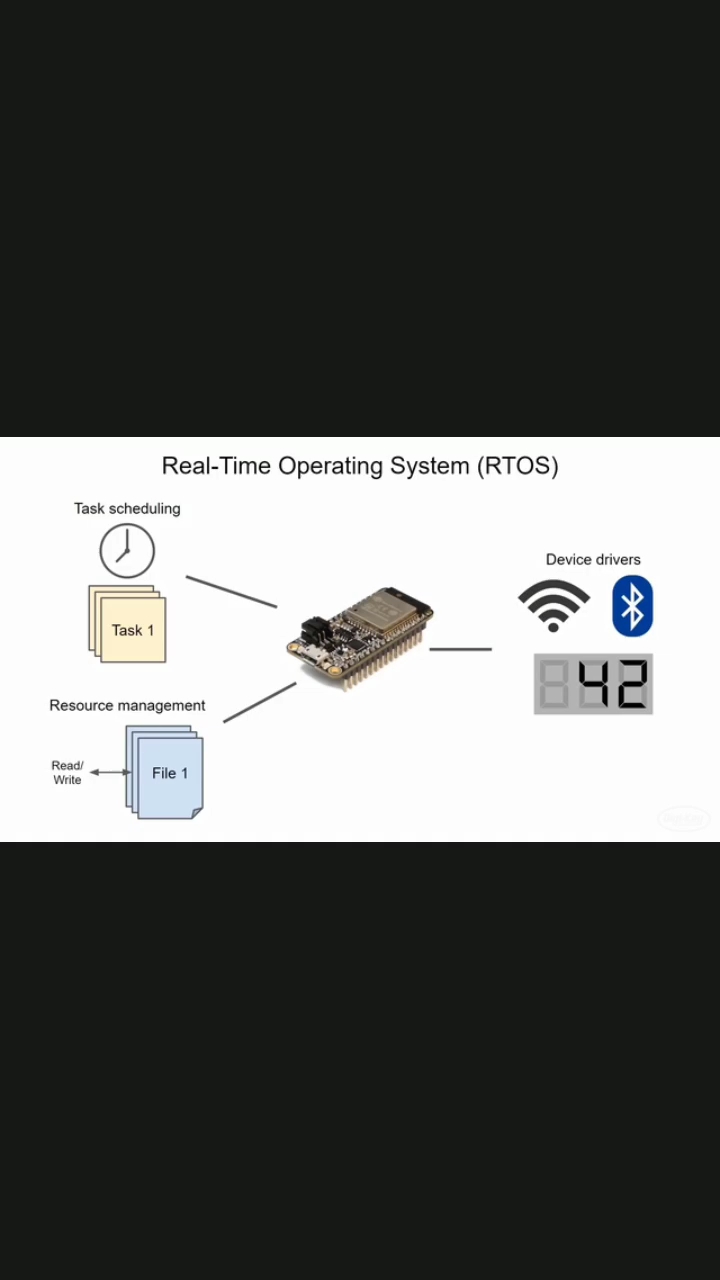
實時操作系統 (RTOS) 是管理微處理器或微控制器時間的軟件。實時系統指如果系統的邏輯和時序正確性無法滿足,可能會導致嚴重后果的系統。實時多任務應用是一個必須同時處理多個時間關鍵活動的系統。實時
2022-08-30 11:10:588597 實時操作系統(RTOS)是一種專為實時應用程序設計的操作系統。實時應用程序需要在特定時間內做出預測的響應,因此 RTOS 專注于提供對時間約束的強調,以確保系統能夠滿足實時性能要求。
2023-11-23 17:14:121354 什么是前后臺系統呢?RTOS操作系統是由哪些部分組成的?
2021-11-01 07:29:03
RTOS系統RTOS全程為:Real Time OS,就是實時操作系統。實時操作系統分為硬實時和軟實時。硬實時要求在規定時間內必須完成操作,硬件實時系統有不允許超時。RTOS操作系統:UCOS
2022-01-26 08:01:01
簡單來說,實時操作系統(RTOS)是指當外界事件或數據產生時,能夠接受并以足夠快的速度予以處理,其處理的結果又能在規定的時間之內來控制生產過程或對處理系 統作出快速響應,并控制所有實時任務協調一致
2021-12-14 06:07:21
對許多嵌入式項目來說,系統設計師都傾向于選擇實時操作系統(RTOS)。但RTOS總是必要的嗎?答案是取決于具體的應用,因此了解我們要達到什么目標是決定RTOS是必要的還是花瓶的關鍵。一般來說,在采用
2020-04-01 07:48:01
什么是單片機?什么是嵌入式呢?實時操作系統和Linux分時操作系統有哪些區別呢?
2022-01-24 07:36:59
實時可預測性是實時系統的重要性能標準按照響應時間 實時操作系統可分為 1.普通實時操作系統 響應時間一般是秒級2.強實時操作系統 響應時間為毫秒和微秒級3.弱實時操作系統 響應時間為數十秒RTOS
2021-11-09 08:43:08
對很多嵌入式系統來說,一個設計良好的實時操作系統可以讓開發工程師把握系統執行任何任務或響應任何關鍵事件的時間,滿足系統實時性要求。為了理解RTOS如何通過系統調度策略實現實時性要求,本文介紹了搶占式調度、可搶占的內核、優先級繼續和中斷處理等概念。
2019-07-19 06:18:41
計算機三級知識點總結五嵌入式系統篇實時系統(RTS)實時操作系統(RTOS)實時操作系統是實時系統使用的操作系統實時系統是指必須在有限和確定的實踐內對外部實踐做出相應的信息系統根據時限對系統性能的而
2021-12-23 06:39:09
實時多任務操作系統(Real Time multi-tasking Operation System, RTOS)實時多任務操作系統(RTOS)是嵌入式應用軟件的基礎和開發平臺。目前在中國
2011-08-12 14:31:53
:任務、進程和線程。實時多任務操作系統(RTOS)是嵌入式應用軟件的基礎和開發平臺,它是根據操作系統的工作特性
2021-08-24 06:34:41
SylixOS 是一款大型嵌入式實時操作系統,誕生于2006年,起初它只是一個小型多任務調度器,經過多年開發,SylixOS 目前已經成為一個功能完善、性能卓越、可靠穩定的嵌入式系統軟件開發平臺
2023-04-25 14:18:32
上一篇系列文章“INtime可與Windows在同個PC運行的實時操作系統(上)”中我們介紹INtime實時操作系統的基本特性與功能。本篇文章將著重介紹INtime RTOS內部的關鍵處理機制及其
2021-07-02 06:41:14
(嵌入式 實時操作系統 rtos nuttx 7.1)NuttX 介紹轉載請注明出處: NuttX 實時操作系統NuttX 是一個實時操作系統(RTOS)。強調標準兼容和小型封裝,具有從8位到32位微控制器環境的高度可擴展性。NuttX 主要遵循Pos...
2021-08-06 07:53:35
NuttX 介紹NuttX 實時操作系統NuttX 是一個實時操作系統(RTOS),強調標準兼容和小型封裝,具有從8位到32位微控制器環境的高度可擴展性。NuttX 主要遵循Posix 和 ANSI 標準,對于在這些標準下不支持的功能,或者不適用...
2021-08-05 08:27:06
本應用手冊介紹PSoC可編程片上系統的實時操作系統(RTOS)。該系統可以用于各種應用,如:控制系統或汽車業。
2012-11-22 15:56:35
的肩,可以編出高質量的程序。下面附件中給出了在采用STC16芯片的STC官方實驗箱V8.3上運行的uCx51-RTOS實時多任務操作系統的范例,實現的是與上篇在天問51-STC16開發板一樣的功能。有
2021-06-01 09:49:48
環境下,可以通過建模完成APP代碼生成。該工具包功能豐富涵蓋了APP應用建模所需。STM32的RTOS操作系統RTOS是一款實時操作系統,其優越性不再贅述,在STM32程序開發過程中,采用ST官方STM32CubeMX工具,配置IOC文件,可以輕松生成可靠的RTOS應用環境,手工添加任務代碼。但是,在MBD
2021-08-17 07:48:38
Small RTOS51嵌入式實時操作系統具有什么特點?Small RTOS51的任務管理和任務間的通信與同步
2021-04-28 06:17:05
最近我正在研究xilkernel想知道的是xilkernel實時操作系統?因為沒有文件聲明Xilkernel是RTOS。
2020-04-09 13:01:09
文章目錄1簡介1uCOS-II中的任務1簡介uCOS-II實時操作系統實時操作系統與分時操作系統的區別:分時操作系統將時間一塊一塊的分給不同的任務。實時操作系統提供給用戶三樣東西:內存管理
2021-12-14 06:42:55
,基于嵌入式實時多任務操作系統FreeRTOS,通過一系列的實驗,深入分析了RTOS的工作原理和實現機制。全書共有四篇14章,第一篇嵌入式系統開發流程及軟硬件開發工具介紹,第二篇內核基礎實驗 - RTOS理論
2022-04-14 11:28:41
,并能控制所有實時設備和實時任務協調運行,且能在一個規定的時間內完成對事件的處理,那么這種系統就稱為實時操作系統(RTOS)。按時間的正確程度來分,實時操作系統又分為硬件的實時操作系統和軟件的實時
2016-01-15 15:35:35
滿足實時控制要求的嵌入式操作系統(RTOS)操作系統,以下介紹14種主流的RTOS,分別為μClinux、μC/OS-II、eCos、FreeRTOS、mbed OS、RTX、Vxworks、QNX
2021-10-27 07:28:51
目前國內的實時操作系統正在如春天般的萬物發展趨勢一樣,充滿蓬勃生機。但是多數情況下,各自為戰,開發的軟件大家得不到有效的共享。有的時候某位作者開發出來了協議棧,但是其他作者卻無法使用,或者要使用帶來
2013-06-01 10:13:14
執行。rt-smart 是一款高性能混合微內核操作系統,在傳統嵌入式操作系統劃分中,rt-smart 能夠填補傳統 RTOS 和大型操作系統 Linux 之間的空白,在實時性、成本、安全性、啟動速度等方面可以取得最佳的平衡。原作者:ART-Pi
2022-06-22 17:56:10
作者:Paul N. Le對很多嵌入式系統來說,一個設計良好的實時操作系統(RTOS)可以讓開發工程師掌握系統執行任何任務或響應任何關鍵事件的時間,滿足系統實時性要求。為了理解RTOS如何通過系統
2019-07-09 07:43:17
很多朋友長時間使用裸機編程,切換過來學習RTOS,就對其中很多概念產生了誤解。大部分人開始學習RTOS實時操作系統時,對RTOS中的一些概念都不太理解。一上來就是臨界段、調度、信號量、互...
2022-03-01 07:24:31
嵌入式實時操作系統FreeRTOS基本概述在嵌入式領域當中,實時操作系統的應用越來越廣泛了,目前嵌入式操作系統種類很多,例如:μClinux、μC/OS-II、μC/OS-III、FreeRTOS
2022-02-16 07:12:02
,重點介紹了適合于小RAM單片機的嵌入式實時操作系統Small RTOS51,以及基于8位單片機的硬件和軟件的設計方法和過程。
2019-11-07 07:42:18
嵌入式實時操作系統rtems的特點及研究現狀RTEMS簡介1RTEMS是一個開源的無版稅實時嵌入操作系統RTOS。它最早用于美國國防系統,早期的名稱為實時導彈系統(Real Time
2021-12-14 07:12:31
嵌入式實時操作系統uCos:嵌入式實時操作系統μCOS -II一、RTOS基礎 實時操作系統特點任務管理任務間同步和通信存儲管理? 多任務和基于優先級的任務調度定時器管理中斷管理
2011-12-10 14:35:57
在嵌入式領域中,嵌入式實時操作系統(RTOS)正得到越來越廣泛的應用。采用嵌入式實時操作系統可以更合理、更有效地利用CPU的資源,簡化應用軟件的設計,縮短系統開發時間,更好地保證系統的實時性和可靠性。內存資源作為嵌入式系統中極為重要的資源之一,其管理機制歷來是嵌入式系統設計的重點和難點。
2020-11-25 06:48:44
基礎知識在嵌入式領域中,采用嵌入式實時操作系統(RTOS)可以更合理、更有效地利用CPU的資源,簡化應用軟件的設計,縮短系統開發的時間,更好地保證系統的實時性和可靠性。FreeRTOS是一個迷你
2022-01-24 06:44:48
特點實時操作系統 (RTOS) 用于開發在嚴格時間線內響應事件的系統首先介紹了 RTOS 的概念,并比較了一些其他實現實時性能的替代方法了解了任務、隊列、互斥體和信號量等基本原理,以及微控制器選型
2022-02-28 08:22:42
前言自20世紀90年代,鑒于多任務支持、開發便捷、便于維護等特性,同時能夠提高系統的穩定性和可靠性,嵌入式實時操作系統(RTOS)逐漸為廣大嵌入式從業人員所接受和認可,越來越多的工程師加入
2021-08-05 06:14:17
在嵌入式領域中,嵌入式實時操作系統正得到越來越廣泛的應用。采用嵌入式實時操作系統(rtos)可以更合理、更有效地利用cpu的資源,簡化應用軟件的設計,縮短系統開發時間,更好地保證系統的實時性和可靠性
2019-07-01 08:19:46
為什么嵌入式實時操作系統RTOS會被廣泛使用?怎樣去更好地使用嵌入式實時操作系統RTOS呢?
2021-11-02 06:41:04
運行,系統資源豐富、復雜。是計算機、電腦、平板和手機等的核心根據處理性能的不同,運行的操作系統也有所不同。微控制器多運行實時操作系統(RTOS),對任務時間性要求比較高。處理器多運行Windows
2019-09-18 09:05:06
freertos是硬實時操作系統嗎?都有哪些硬實時操作系統啊?
2020-06-13 09:00:53
諾微?Cortex-M系列芯片支持哪些實時操作系統RTOS?
2020-12-15 07:38:02
對許多嵌入式項目來說,系統設計師都傾向于選擇實時操作系統(RTOS)。但RTOS總是必要的嗎?答案是取決于具體的應用,因此了解我們要達到什么目標是決定RTOS是必要的還是花瓶的關鍵。一般來說,在采用
2019-06-29 08:00:00
高效實時操作系統原理以及實踐大致具體的書的內容:(初定義,會不定時修改)1 raw os基于vc++ 的仿真模擬環境Vc 仿真有什么好處?運行一些具體的實例。(lwip 協議棧, ucgui)2
2013-01-28 15:19:08
OSEK/VDX操作系統是一種嵌入式實時操作系統(RTOS),具有可裁剪性。本文著重描述了操作系統的內核,包括任務管理機制、一致類、事件機制、調度機制、中斷管理、資源管理機制和
2009-04-20 08:38:22 25
25 從整體上介紹VxWorks、pSOSystem、Hopen OS、Pencil、CMX、PTXC 幾種實時操作系統(RTOS)及其特點, 有助于RTOS 選型。
2009-05-13 15:44:0517 摘要:介紹在星載計算機中應用實時操作系統的兩種方式:使用一種源碼開放的RTOS——RTEMS和自主開發RTOS,并對兩種方法進行比較。隨著我
2006-03-11 12:20:581231 
對許多嵌入式項目來說,系統設計師都傾向于選擇實時操作系統(RTOS)。但RTOS總是必要的嗎?答案是取決于具體
2010-10-28 10:41:579090 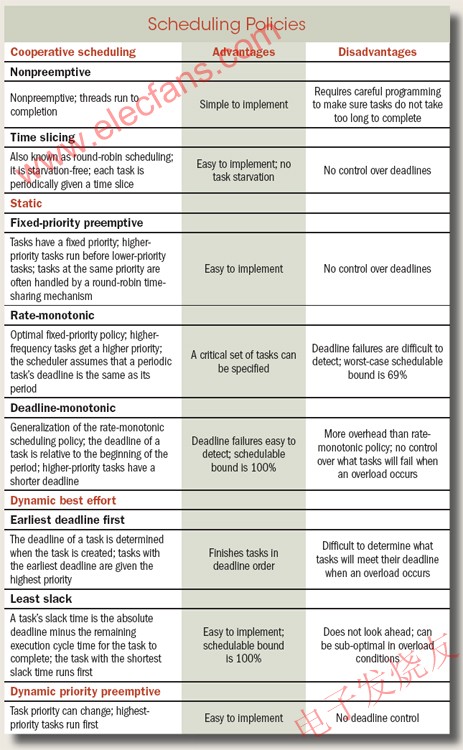
概要 背景嵌入式產品開發商若想在解決方案中使用Windows* 操作系統,通常需要添加一個實時操作系統 (RTOS),以運行幾乎對所有嵌入式應用都相當重要的確定性算法。為此,開發商通
2011-05-09 15:57:0024 QNX軟件系統有限公司日前宣布QNX Neutrino 實時操作系統(RTOS) Certified Plus產品即將問世,這是首款能夠同時提供產品安全及信息安全雙重認證的實時操作系統,服務于列車自動保護系統(A
2011-11-03 09:25:101951 嵌入式實時系統已經在通信、自動控制、信息家電、國防等領城得到了越來越廣泛的應用,嵌入式實時操作系統RTOS是整個嵌入式系統的核心RTEMS是源碼公開的實時多任務操作系統。它具
2011-12-27 16:52:0178 PICRTOS實時操作系統4kb一個運行于PIC芯片的多任務內核
2012-09-18 10:46:5782 RTOS操作系統RTOS操作系統RTOS操作系統RTOS操作系統RTOS操作系統
2015-12-28 15:30:440 BenOS實時操作系統解密BenOS實時操作系統解密BenOS實時操作系統解密BenOS實時操作系統解密
2016-01-12 10:54:025 隨著嵌入式技術的發展,實時操作系統RTOS(Real Time Operating System)被越來越多地應用在嵌入式系統中,如:航空航天、工業控制、汽車電子和核電站建設等眾多領域。對于現有
2017-10-31 10:25:261 對很多嵌入式系統來說,一個設計良好的實時操作系統可以讓開發工程師把握系統執行任何任務或響應任何關鍵事件的時間,滿足系統實時性要求。為了理解RTOS如何通過系統調度策略實現實時性要求,本文介紹了搶占
2017-11-03 11:38:120 引言 實時操作系統(RTOS),在整個嵌入式系統中扮演著十分重要的角色,它就像人的大腦支配人的行為一樣,控制著整個系統的工作與運轉,一個RTOS性能的優劣將對整個系統的性能產生直接的影響。衡量
2017-11-30 11:29:02645 
嵌入式實時系統中采用的操作系統我們稱為嵌入式實時操作系統,它既是嵌入式操作系統,又是實時操作系統。
2018-09-30 09:31:094760 嵌入式實時操作系統(Embedded Real-time Operation System,RTOS)。嵌入式系統是“用于控制、監視或者輔助操作機器和設備的裝置”
2019-11-06 11:36:541064 STM8都支持哪些RTOS操作系統?
2020-02-28 17:23:443393 
在RTOS實時操作系統中是怎樣實現多任務的?
2020-03-03 13:49:114238 
Windows等操作系統與嵌入式系統中常用的RTOS的主要區別,在于對外部事件的響應時間。Windows等普通OS提供對事件的不確定性響應,即使試圖保持響應速度也無法保證何時處理事件。
2020-04-29 14:49:2914540 本文主要闡述了實時操作系統的特點及組成。實時操作系統(RTOS)是指當外界事件或數據產生時,能夠接受并以足夠快的速度予以處理,其處理的結果又能在規定的時間之內來控制生產過程或對處理系統做出快速響應,調度一切可利用的資源完成實時任務,并控制所有實時任務協調一致運行的操作系統。
2020-09-01 16:48:124375 本文主要闡述了實時操作系統和非實時操作系統的區別。
2020-09-02 15:58:319690 足等。 ? 針對這部分朋友,今天分享幾點相關內容: ?嵌入式系統中,有很多方式實現任務調度。功能有限的小系統中,無限循環足夠實現小系統的功能。當軟件設計變得龐大且復雜時,開發者應該考慮使用實時操作系統RTOS。 下面給大家分享幾點RTOS相比裸機的優勢
2020-12-25 15:48:066181 1.什么是實時操作系統? 實時操作系統(RTOS)是指當外界事件或數據產生時,能夠接受并以足夠快的速度予以處理,其處理的結果又能在規定的時間之內來控制生產過程或對處理系統作出快速響應,并控制所有實時
2021-01-19 08:54:2418347 這篇文章我們就來聊一下關于單片機與嵌入式、操作系統與 RTOS 之間的那些事!通過這篇文章,讓你操作系統的實時性有一個系統、全面的理解!
2021-03-29 14:20:556281 
實時操作系統Free RTOS 簡介 FreeRTOS是一個迷你的實時操作系統內核。作為一個輕量級的操作系統,功能包括:任務管理、時間管理、信號量、消息隊列、內存管理、記錄功能、軟件定時器
2021-06-21 14:30:185077 我們平時分享的μC/OS、FreeRTOS、RT-Thread、ThreadX這些都是實時操作系統(RTOS),那么有讀者問:什么是分時操作系統,Linux屬于實時操作系統嗎? 實時操作系統
2021-06-23 17:04:168316 INtime RTOS簡介 INtime RTOS是一個動態的,確定性的硬實時操作系統,用于多核x86兼容處理器上的非對稱多處理(AMP)。與使用虛擬機管理程序,Windows設備驅動程序或單體
2021-08-10 10:58:143086 
滿足實時控制要求的嵌入式操作系統(RTOS)操作系統,以下介紹14種主流的RTOS,分別為μClinux、μC/OS-II、eCos、FreeRTOS、mbed OS、RTX、Vxworks、QNX
2021-10-20 12:36:0014 14 種主流的嵌入式實時操作系統 RTOS,分別為μClinux、μC/OS-II、eCos、FreeRTOS、mbed OS、RTX、Vxworks、QNX、NuttX,而國產的嵌入式操作系統包括
2021-10-20 14:05:5917 對許多嵌入式項目來說,系統設計師都傾向于選擇實時操作系統(RTOS)。但RTOS總是必要的嗎?答案是取決于具體的應用,因此了解我們要達到什么目標是決定RTOS是必要的還是花瓶的關鍵。 一般來說
2021-11-18 10:02:302754 對許多嵌入式項目來說,系統設計師都傾向于選擇實時操作系統(RTOS)。但RTOS總是必要的嗎?答案是取決于具體的應用,因此了解我們要達到什么目標是決定RTOS是必要的還是花瓶的關鍵。 一般來說
2021-11-18 15:45:271960 文章向大家介紹操作系統的基本功能,以及UCOSII的移植方法。RTOS:Real time Operation SystemKeil RTX 是免版稅的確定性實時操作系統,適用于 ARM 和 Cortex-M 設備。RTOS可以自由地調度系統資源,比如CPU和內存,并且提供一種任務間通信機制。
2021-12-23 19:56:261 學習一種實時操作系統RTOS,如uc/OS,掌握實時系
統的概念和設計方法;
l 嵌入式系統以應用為中心,應用時選擇“適用”的操
作系統;
2022-09-27 14:27:030 基于實時操作系統 (RTOS) 構建的應用程序每天都在被整合到更大、更復雜的環境中。例如,戰斗機具有許多不同的計算機系統,這些系統可能運行不同的操作系統。
2022-10-17 14:57:49518 實時操作系統(Real Time Operating System,簡稱RTOS)是指當外界事件或數據產生時,能夠接受并以足夠快的速度予以處理,其處理的結果又能在規定的時間之內來控制生產過程
2022-11-17 20:42:27931 要了解RTOS,讓我們退后一步,看看什么是“通用操作系統”(GPOS)。您可能已經熟悉 GPOS,因為它們可以在您每天使用的設備上找到,例如智能手機和工作電腦(例如 Android、Windows 等)。
2022-11-30 14:56:002971 我們平時分享的μC/OS、FreeRTOS、RT-Thread、ThreadX這些都是實時操作系統(RTOS),那么有讀者問:什么是分時操作系統,Linux屬于實時操作系統嗎?
2022-12-28 11:39:491121 對許多嵌入式項目來說,系統設計師都傾向于選擇實時操作系統(RTOS)。但RTOS總是必要的嗎?答案是取決于具體的應用,因此了解我們要達到什么目標是決定RTOS是必要的還是花瓶的關鍵。
2023-05-30 09:45:32719 實時系統有各種各樣的實現方式和使用情況。本書的重點是如何使用實時操作系統(RTOS)在微控制器單元(MCU)上創建實時應用程序。
2023-06-15 17:21:30843 
(Real-timeoperatingsystem,RTOS),又稱即時操作系統,它會按照排序運行、管理系統資源,并為開發應用程序提供一致的基礎。與一般的操作系統相比,RTOS最大的特色就是“實時性”,如果
2022-09-22 10:02:506683 
6月15日晚2000,虹科技術工程師許工為大家分享了“虹科實時操作系統INtime7——解決智能制造苛刻實時需求的關鍵RTOS”主題直播課程,課程的主要內容包括實時操作系統的必要性、虹科INtime
2023-06-21 17:23:04514 
、協程等,可基本滿足較小系統的需要。由于RTOS需占用一定的系統資源(尤其是RAM資源),只有μC/OS-II、embOS、salvo、FreeRTOS等少數實時操作系統能在小RAM單片機上運行。相對μC/OS-II
2023-06-29 17:15:30478 
大家平時玩單片機基本上對于μC/OS、FreeRTOS、ThreadX這些操作系統非常熟悉了,他們都屬于實時操作系統(RTOS),在工業領域比較廣泛;
2023-08-18 09:48:591216 大家平時玩單片機基本上對于μC/OS、FreeRTOS、ThreadX這些操作系統非常熟悉了,他們都屬于實時操作系統(RTOS),在工業領域比較廣泛;然而對于linux這樣的基于時間片劃分的非實時
2023-09-21 10:19:242802 到底啥是實時操作系統呢?它到底實時不實時呢? 實時操作系統(Real Time Operating System,RTOS)是一種特殊類型的操作系統,可在嚴格的時間限制下進行處理。它的特殊之處
2023-10-29 16:33:06630
 電子發燒友App
電子發燒友App












 工商網監
工商網監
評論