KUKA庫卡C4機器人驅動器故障報警維修庫卡機器人維修內容包括庫卡機器人示教器維修,KUKA伺服驅動模塊維修,庫卡機器人伺服電機維修,KUKA機械手PC工業電腦維修,庫卡機器人電路板維修,庫卡機器人
2021-09-17 07:09:52
1 開機坐標系無效 世界坐標系是以槍頭為基點,在這種坐標系中機器人所有的動作都是按照以槍頭為頂點來完成移動,XYZ方向切割槍方向不改變,如果機器人在世界坐標系中移動,槍頭也隨著改變方向,那就是我們在
2019-07-15 07:48:36
通常情況下,我們所說的機器人伺服系統是指應用于多軸運動控制的精密伺服系統。一個多軸運動控制系統是由高階運動控制器與低階伺服驅動器所組成,運動控制器負責運動控制命令譯碼、各個位置控制軸彼此間的相對運動
2020-09-02 14:36:11
KUKA庫卡機器人伺服驅動器(Servo Drive)是KUKA運動控制的重要組成部分,被普遍應用于工業機器人及數控加工中心等自動化設備中。是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于
2020-09-08 16:30:28
盡可能避免切削液的飛濺。(2)當庫卡機器人伺服電機安裝在齒輪箱上時,加注潤滑油時應注意齒輪箱的潤滑油油面高度必須低于伺服的輸出軸,防止潤滑油滲入電動機內部。(3)固定庫卡機器人伺服電機聯軸器、齒輪
2020-09-26 16:51:21
這個是KUKA重型機器人處理和測量混凝土軌枕的視頻。處理得相當精細。真心值得愛好機器者和愛國者研究研究。
2015-02-03 15:18:31
描述平衡機器人護盾
2022-09-05 06:11:44
有沒有機器人比較全的資料
2017-03-21 12:35:21
請各位大神指導,移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉移的?
2016-07-26 13:33:14
labview 視覺機器人抓取工件 CCD相機的二維坐標系的建立?希望分享,謝謝
2017-08-18 20:53:37
機器人的運動原理還是屬于最基本的簡單機械。機器人運動主要是依靠什么裝置?有些什么裝置是機器人用的比較多的?
2015-02-03 11:22:01
現在想做機器人圖像識別方面的研究,有問題請教大家,比如說:現在有十種瓶子,機器人能識別我指定的瓶子,并把它從A位置移動到B位置,關鍵是如何識別呢,不是很清楚,求大神指點!在此感激不盡!
2019-11-04 09:02:57
想弄一個vi可以動態顯示機器人的姿態,但不知道有什么函數可以引入機器人的模型,幫幫忙,謝謝。
2012-02-11 17:25:22
移動機器人有沒有推薦的MCU,萌新求大佬幫助
2020-11-03 11:41:09
各位論壇前輩你們好,我是一名在校的即將升入大二學生,專業課暫時只學了c,電路分析基礎和工程制圖。我跟另外4個同學正在參加學校的機器人比賽,在機器人創意表演方面,就突發奇想,是否能做一個可以彈簡單
2017-05-22 17:09:06
各位論壇前輩你們好,我是一名在校的即將升入大二學生,專業課暫時只學了c,電路分析基礎和工程制圖。我跟另外4個同學正在參加學校的機器人比賽,在機器人創意表演方面,就突發奇想,是否能做一個可以彈簡單
2017-05-22 17:06:22
機器人有哪些種類?大家來說說
2014-12-25 10:01:32
機器人有哪些類型?
2021-06-18 06:41:57
現在的機器人使用的電機多是什么品牌的呀,還是自己根據需求定制的呀?
2016-03-15 10:37:57
。 1、自由度 機器人具有的獨立坐標軸運動的數目。機器人的自由度是指確定機器人手部在空間的位置和姿態時所需要的獨立運動參數的數目。手指的開、合,以及手指關節的自由度一般不包括在內。.機器人的自由度
2017-08-15 14:00:52
機器人的優缺點有哪些?機器人是由哪些部分組成的?
2021-10-11 07:51:29
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
安靜高效的機器人正在接管——阻止它們已經太遲了。不,這不是機器人世界末日另一個可怕的故事。這是關于您下一設計硬件預算和規劃面臨威脅的問題。雖然您無法阻礙技術變革,但是您可以預測其影響。
2019-07-17 08:08:16
、KUKA、Yaskawa Motoman、FANUC2.2.1 本體結構本體結構分類:不同機器人建模控制的本質區別關節型機械臂:串聯垂直多關節6軸機器人SCARA機械臂:笛卡爾機械臂:Delta并聯機械臂:雙平行四邊形機械臂(碼垛機器人)其他類型機械臂:圓柱形、球坐標符號表示機器
2021-09-08 07:44:15
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。
2019-09-10 10:44:32
機器人編程需要什么軟件
2023-11-01 07:34:30
`據傳奧地利發生了一起機器人自殺事件,自殺的機器人叫Roomba 760。據說這位機器人自殺的原因是忍受不了繁重又無限重復的清潔工作,而選擇了***。***之后是這個樣子滴是不是渣都木有了`
2016-01-05 11:07:53
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核心角色
2023-12-21 20:03:18
完善這個作品。主要運用的算法1、D-H參數模型2、三軸姿態解算3、六次項足跡規劃4、步態規劃5、平臺姿態解算即18軸加平面軸解算(未完成)知識點1、運動學2、機器人學3、數學基礎知識(矩陣、三角函數、坐標系
2014-03-27 18:51:05
完成競走、舞蹈、跳舞、格斗等類 人動作,可以自己調試編程各種有趣的動作程序,是廣大學生、老師、 機器人愛好者可選的一款性價比極高的優質機器人套件,不僅可以用 于學習、研究,乃至作為工藝品收藏。(2
2022-05-10 16:58:21
安裝連接,安裝過程中只 有等到固定了實軸舵盤之后才可以旋動舵機,這樣是為了保證舵機的 物理位置不被改變,否則安裝過程中的舵機角度位置誤差太大,動作 程序不能通用。)圖 28(2)安裝機器人的前胸和后蓋
2022-08-12 17:07:54
就是說,一個機器人發指令,一堆機器人向這個機器人靠攏,可以通過zigbee么?或者是別的什么傳感器?先謝過了!
2012-09-26 18:50:15
` 山東昊威機器人有限公司的書法機器人在展會上可謂是吸睛神器,小伙伴們紛紛前來圍觀,這不,國際友人都不禁為我們昊威書法機器人手動點贊啦!!!厲害啦我的機器人。`
2017-08-11 11:48:54
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
清潔機器人是服務機器人的一種,所謂服務機器人是指自主或半自主的、從事非生產活動、能完成有益于人類健康的服務工作的機器人。家庭清潔機器人集機械、電子、傳感器、計算機、控制、機器入技術、人工智能等諸多
2019-09-05 06:56:37
有沒有人知道什么是拖拽式機器人,其具體定義是什么
2016-03-11 09:20:00
以根據人工智能技術制定的原則綱領行動。6軸工業機器人的全部控制由一臺微型計算機完成。另一種是分散式控制,即采用多臺微機來分擔機器人的控制,如當采用上、下兩級微機共同完成機器人的控制時,主機常用于負責
2017-08-09 16:30:09
1)可編程:6軸工業機器人最大特點是柔性啟動化,柔性制造系統中的一個重要組成部分。工業機器人可隨其工作環境變化以及加工件的變化進行再編程,適合于小批量多品種具有均衡高效率的柔性制造生產線的應用。2
2017-08-08 11:30:29
`力泰科技資訊:搬運機器人是比較常見的一種機器人,一般選擇3-6軸會比較多一點。軸數更多意味著自由度更高,更靈活,在較狹小的空間也能靈活運動,這就意味著6軸搬運機械手的造價相對于軸數少的多關節機器人
2018-08-14 09:37:05
現在流行的自平衡兩輪機器人,有人接觸過嗎,小弟最近想DIY一個玩玩,現在碰到了一個難點,至今沒想通,這一類自平衡機器人都是能夠載物的,不同的物體放在托盤上面,會影響機器人的重心偏移,應該采用什么算法
2016-11-24 11:20:07
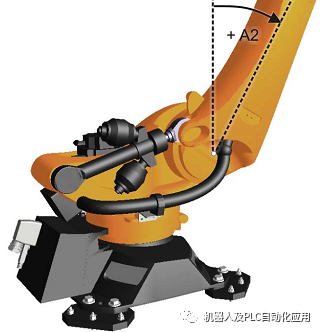
的,平衡器一旦氣壓釋放,可能會發生2和3軸下墜現象。這個時候如果釋放電機剎車直接會發生下墜現象,吊不吊裝呢?我的建議是有必要進行吊裝!總之是為了安全!以防萬一!關于氮氣補充的步驟如下:1. 調整機器人到原點姿勢后,關閉控制柜電源。3. 將壓力計連接到快速接頭(由于壓力...
2021-09-07 08:21:54
工業機器人的四大特征是哪些?工業機器人是由哪些部分組成的?工業機器人是怎樣進行劃分的?
2021-10-11 09:10:17
求一套寫字機器人的程序,用arduino編寫的。怎么實現
2020-10-17 15:20:25
1.什么品牌的DIY機器人比較推薦,哪里可以買(哪個平臺)?2.DIY機器人入門需要注意什么?
2021-07-22 22:18:03
描述迷你平衡機器人大家好。我知道互聯網上已經有很多平衡機器人項目,但我也想做一個。實際上,我想制作一些特別的東西并制作一個迷你平衡機器人,但我的步進電機有點失敗,我將在下面的視頻中解釋這個問題。所以
2022-07-07 07:17:03
`華南機器人應用培訓中心擁有各種設備,開展各種不同的機器人培訓班。打造各種工業現場常見的機器人工作站,現開展KUKA、發那科、三菱、ABB、愛普生工業機器人培訓對外招生。 一、認識機器人技術:工業
2015-09-02 14:03:18
生產自動化水平,提高勞動生產率、產品質量以及經濟效益,改善勞動條件等方面有著長足的進步和作用,在未來機器人工業必將得到更加快速的發展和更加廣泛的應用。現在工廠內使用最普遍的兩種機器人:單軸機器人和多軸
2017-11-23 10:17:45
制造出像人一樣具有智能的能替代人類勞動的機器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機器人的研究中,具有視覺的機器人的研究也就成了第一位的。對機器人視覺伺服系統的研究是機器人領域中的重要內容之一,其研究成果可應用在機器人自動避障、軌跡跟蹤和運動目標跟蹤等問題中。
2019-09-27 08:07:35
工業生產中,傳統的工業機器人在生產適用性上已經不能滿足日益增長的多任務需求,多軸機器人順勢發展,趨勢明顯。多軸機器人是能夠實現自動控制的、可重復編程的、多自由度的、運動自由度建成空間直角關系
2020-07-29 06:57:04
如何完整的組裝四足機器人?
2021-09-24 07:00:54
各位大神,現在小弟想用LabVIEW控制安川機器人,可是通過調用motocom32的DLL不能和機器人通信,聽說LabVIEW不能二次開發安川機器人,請問有熟悉安川機器人的高手指點一二,不勝感激!
2014-11-10 12:29:06
如何設計一款球上自平衡機器人?
2022-02-22 07:39:46
很高,安全,性能超越,這個技術是為航天航空研發的,執行的標準是美軍標,MIL-C-22520系列標準,所有的四芯軸工具都是在此標準技術上發展來的。在這種壓接形式下,我們就根本不用擔心機器人連接
2017-04-25 16:34:23
如題。在論壇有看到家用機器人的2014年度十大款類型。比較感興趣,不知道有沒有大神了解比較全面的家用機器人知識?
2015-02-11 11:16:00
目錄概述行走軸模型拆分行走軸模型導入仿真軟件創建行走軸機械裝置外部軸配置向導插件安裝虛擬機器人系統創建行走軸系統配置機器人安裝到行走軸行走軸運動控制文已經首發在個人微信公眾號:工業機器人仿真與編程
2021-09-07 08:57:47
機器人1、機器人本體1)具有6個自由度,串聯關節型工業機器人;2)重復定位精度:±0.01mm;3)承重能力:3kg;4)水平到達距離: ≥580mm;5)重量: ≥27kg;6)各軸運動范圍J1軸≥±180J2軸≥-155°/+5°J3軸≥-25°/+240°J4軸≥±180°J5
2021-07-01 11:06:26
隨著中國制造業轉型步伐的加快,機器人的使用越來越頻繁,作為工廠里的技術工程師必需了解機器人的相關技術,那么通用機器人由什么部件組成呢?
2020-05-13 07:45:10
各種類型的機器人(如2圖):①直角坐標型(如2圖a是三個直線坐標軸);②圓柱坐標型(如2圖b是兩個直線坐標軸和一個回轉軸);③球坐標型(如2圖c是一個直線坐標軸和兩個回轉軸);④關節型(如2圖d是三個
2015-01-19 10:36:12
的布局如下: 傳統機器人KR對于KR系列這一類的傳統機器人來講,末端的布局一般按照滿足“三軸軸線交于一點”的基本原則來做,主要區別在于三個電機的布置和傳動方式。KUKA之前的很多機器人都采用4、5、6三
2018-11-01 11:08:12
工業機器人是近兩年機械行業最熱的字眼,隨著企業工業機器人的增多,很多機械工程師對于工業機器人充滿了好奇。作為機器人四大家族之一的KUKA,已經被美的收購,小編這就帶你走近KUKA工業機器人的內部結構
2021-07-05 06:44:21
; G:自動運行狀態速度修改; H:啟動機器人正常運行。 2、外部cell程序通過IO選擇程序啟動 庫卡KUKA機器人四種啟動方式外部自動選擇cell程序啟動方式,是指在庫卡機器人未選擇任何程序,打到
2020-09-04 15:45:41
KUKA庫卡機器人MGV電源模塊維修PH1013-2840MGV電源維修 庫卡電源模塊維修 機器人電源模塊維修 庫卡控制器維修 KUKA電源維修KUKA庫卡機器人電源模塊維修MGV控制器維修
2021-09-08 07:30:00
怎么實現六足機器人的設計?
2021-11-22 08:02:22
怎么實現對機甲大師機器人的控制?
2021-11-19 06:33:45
畢業設計——球上平衡機器人前言本次畢業設計過程中,受到過許多人的幫助,收獲良多,在此將機器人整體開源,同時總結一下機器人搭建過程中遇到的坑和未來的改進方向。一、機器人原理分析首先來看成品圖如圖所示
2021-08-17 08:44:42
很多人喜歡玩機器人,四軸,智能車,在這里給大家推薦一本書,書名叫做《BeagleBone 機器人開發指南》這本書里面說的細節雖然不是很多,但是各種機器人設計所需要的基本資源都說的很清楚,還舉了很多典型的應用例子,比如比如用opencv來demo人臉識別等讀起來非常輕松入門非常不錯的參考
2016-01-08 17:54:59
關于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
起步較晚,隨著掃地機器人功能更完善,智能化程度更高,預計未來中國沿海發達地區掃地機器人滲透率水平會達到美國掃地機器人目前的滲透率水平。2.本文編寫目的本文主要介紹通過智能WiFi控制技術實現手機微信控制
2017-05-27 13:31:20
智能監控機器人是近年來機器人應用工程中一項前沿性的題目,智能化探測小車是智能行走機器人的一種。智能監控機器小車就是針對上述情況,在參考了目前大多數智能機器人的基礎上,以降低成本為原則設計的。小車具備
2019-10-14 07:37:52
未來家庭的監控機器人應該要具備以下特征:1.擬人化設計,具有可愛的操作接口讓人很容易從遠 端監控.2.監控機器人可以儲存所看到的影像,并通過遠程傳給家庭主人.3.監控機器人本身要有基本的感知
2019-10-30 02:25:39
尋求KUKA機器人控制柜三維模型,做方案有時需要用到,大家誰有可以給我發一份嗎?先謝謝了
2016-04-18 16:05:43
目的:模仿人手動作測試手機屏幕,比如點擊、滑動有沒有朋友熟悉能完成此功能的成品機器人,不想自己動手搭建三軸滑臺。。。
2016-10-08 14:24:39
我看NI有Robotics Toolkit for KUKA KR C2的附加包,這個怎么用啊?如何和kuka機器人建立通訊啊?是Tcp接口嗎?
2023-10-21 20:59:28
的6軸關節式操作機,它由驅動器、傳動機構、機械手臂、關節以及內部傳感器等組成。2、機器人控制柜:它是機器人系統的神經中樞,包括計算機硬件、軟件和一些專用電路,負責處理機器人工作過程中的全部信息和控制其
2020-11-16 16:18:45
。
它,就是可以自平衡的賽車機器人——B_ROBOT_100ASK
項目簡介
本項目基于jjrobots的開源項目B-ROBOT EVO2進行復刻,與原開源項目不一樣的地方是,作者將原本適配
2023-12-20 10:22:18
KUKA機器人的資料在網上還是挺難找的,早期剛進公司,想自己找點資料學習,發現網上資料好少,而且內容很簡單,直到最近,領導決心培養我負責KUKA的一條流水線,所以才把這些近乎“絕密資料”發給我學習。所以我自身也是初學者,希望把資料分享出來,大家能互相學習,互相交流進步
2016-03-08 23:45:26
隨著人工智能技術的發展,機器人已經開始接管人類的部分工作,例如快遞、工廠作業、餐廳服務員甚至媒體編輯---紐約時報就聘請了一位機器人做總編。未來,機器人可以介入半導體設計開發嗎?例如,機器人可以進行FPGA開發嗎?
2019-10-10 06:33:18
我是新人,求幫助啊,明天需要提交輪式機器人應用的報告,求大神給點建議,可用輪式機器人應用于那些方面,要求實際可行,應用于生活,農業,軍事都可以,謝謝啦
2013-04-17 16:32:16
于機器人控制系統當中。那么今天,我們就通過多軸工業機器人來聊聊機器人控制系統以及控制器的實現。 機器人控制系統 機器人控制系統相當于機器人的大腦,是決定機器人功能和性能的主要部分,它一般分為機器人
2023-02-24 17:05:21
,使讀者快速掌握DELTA并聯機器人的系統設計方法和編程應用,實現理論和實踐的有機結合。2、工業機器人技術基礎及應用本書以國際工業機器人四大家族ABB、KUKA、YASKAWA和FANUC機器人
2018-10-29 17:03:22
HM06L六軸協作機器人可以自動處理重達6公斤以上的任務并且不會降低精確度,HM06L六軸協作機器人工作半徑達到1508mm,是目前市場上負載3kg以上臂展最大的智能協作機器人,也是海默協作機器人
2021-12-24 14:10:45
HM16六軸協作機器人可以自動處理重達16公斤以上的任務并且不會降低精確度,它是目前海默協作機器人系列中負載最大的機器人。工作半徑達到1010mm,因此它可以在不同操作區域之間距離較大的設施中執行
2021-12-24 14:27:10
江智黨建機器人是經過多年的市場沉淀 ;現已可以提供系統 全方位的黨建機器人服務
2022-06-21 07:59:59
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:15:06
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 15:57:13
深圳泰科智能TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產
2023-04-17 16:12:03
模組組成的最小機器人自重僅15kg。安裝簡單RJS關節模組簡化了機器人的裝配流程,裝配過程不再有繁復的零件組裝和走線,一臺6軸機器人僅需要2-3小時便能快速完成。
2023-04-18 14:04:34
TB6-R5協作機器人是一款靈活的輕型工業協作機器人,具有精巧的機械結構設計。這款協作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產應用需求。模塊化
2023-04-19 09:16:32
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-19 10:58:47
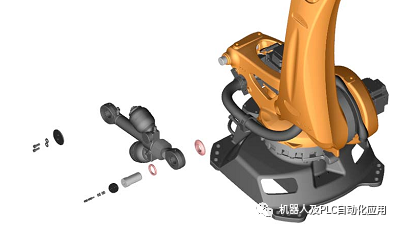
在平衡配重處進行拆卸和安裝作業時有擠傷小臂、手和手指的危險。請佩戴勞保手套并防止平衡配重墜落和意外運動。平衡配重約重 40 kg。平衡配重承受著壓力。在該系統進行任何作業時均須小心謹慎并具有相應的知識。操作不當時有生命危險。
2022-04-20 15:11:33 4494
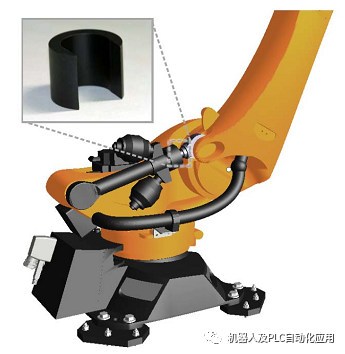
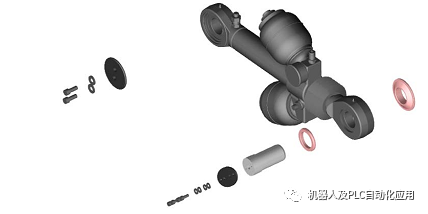
4494 將間隔塊置于魚眼接頭與液壓缸之間敞露的活塞桿上,為此,將橡膠波紋管往后推。
2022-12-28 10:39:58501 將間隔塊置于魚眼接頭與液壓缸之間敞露的活塞桿上,為此,將橡膠波紋管往后推。
2023-02-20 17:04:181066 。 1、單軸機器人一定要按照選用的制動器行程的大小,在機構上選定合適的固定制動器兩端的位置,讓制動器放前后運動時能符合設備。2、單軸機器人安裝固定座要放在所選定的
2023-02-18 17:31:11
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論