 電子發(fā)燒友App
電子發(fā)燒友App


DARPA地下挑戰(zhàn)賽對自主機(jī)器人的未來有何意義。
在美國肯塔基州路易斯維爾的地下深處,有一個巨大的石灰?guī)r洞穴網(wǎng)絡(luò)。洞穴里漆黑、潮濕,滿是灰塵。2021年9月的一個星期,這里擠滿了世界上最先進(jìn)的機(jī)器人。這些機(jī)器人(及其人類隊友)匯聚在此是為了征服美國國防高級研究計劃局(DARPA)設(shè)計的一個大型地下賽道,這也是其為期三年的地下挑戰(zhàn)賽(SubT)的最終目標(biāo)。
地下挑戰(zhàn)賽于2018年初首次發(fā)布。DARPA設(shè)計該競賽的目的是推動極端條件下實用機(jī)器人技術(shù)的發(fā)展,競賽基于3種不同的地下環(huán)境:人造隧道、地下城市和天然洞穴。為了取得好的比賽成績,機(jī)器人必須進(jìn)行團(tuán)隊合作,在嚴(yán)格規(guī)定的時間內(nèi)穿越數(shù)公里的未知區(qū)域并繪制出地圖,搜索找到各種人造物品,并精確地確定它們的位置。為了更逼真地模擬應(yīng)急人員可能使用自主機(jī)器人的場景,機(jī)器人要經(jīng)歷黑暗、灰塵、煙霧,甚至間或會阻塞它們行進(jìn)的崩塌(由DARPA控制)。
本次大賽的直接資助加獎金 額達(dá)到數(shù)百萬美元,DARPA鼓勵國際頂級學(xué)術(shù)機(jī)構(gòu)和行業(yè)開展合作。各參賽隊可在三場巡回預(yù)賽中體驗每種環(huán)境。
?
2019年8月,隧道巡回賽在匹茲堡郊外的美國國家職業(yè)安全衛(wèi)生研究所的實驗煤礦舉行,比賽期間,許多參賽團(tuán)隊在隧道的第一個拐彎處就與機(jī)器人失去了聯(lián)系。6個月后,城市巡回賽在華盛頓州薩特索普一座未完工的核電站舉行,參賽團(tuán)隊通過各種方式加強(qiáng)了通信能力,有的采用直接的以太網(wǎng)電纜,有的使用電池供電的網(wǎng)狀網(wǎng)絡(luò)節(jié)點,在理想的情況下,機(jī)器人走出通信范圍之前,會像扔面包屑一樣沿途扔下網(wǎng)絡(luò)節(jié)點。洞穴巡回賽原定于2020年秋季舉行,后因新冠疫情而取消。
當(dāng)各支參賽隊伍進(jìn)入路易斯維爾巨洞,參加地下挑戰(zhàn)賽決賽時,比賽的重點將不再是通信,而是自主性。和預(yù)賽一樣,參賽人員不允許進(jìn)入賽道,而且每隊只允許一人與該隊的機(jī)器人進(jìn)行遠(yuǎn)程交互,因此直接遠(yuǎn)程控制是不切實際的。很明顯,快速穿越賽道唯一的可行辦法是機(jī)器人團(tuán)隊自主決定往哪里走、如何到達(dá)那里。 DARPA為地下挑戰(zhàn)賽決賽費(fèi)盡了心思,在現(xiàn)有洞穴中建造了一條長達(dá)1公里的巨大賽道。工作人員用集裝箱首尾相連形成復(fù)雜的網(wǎng)絡(luò),其中許多經(jīng)過精心雕琢和裝飾,很像采礦隧道和天然洞穴。辦公室、倉庫,甚至是一個地鐵站,都是從零開始建造的,它們構(gòu)成了賽道的城市部分。各參賽團(tuán)隊可用1個小時的時間盡可能多地找到40件人造物品。想要在比賽中得分,機(jī)器人必須向賽道入口處的基站報告物品的位置,這是一個挑戰(zhàn),因為在賽道的遠(yuǎn)端無法實現(xiàn)直接通信。 ? ?
共有8支隊伍進(jìn)入了地下挑戰(zhàn)賽決賽,其中大多數(shù)都帶來了精心設(shè)計的可協(xié)同工作的機(jī)器人組合。輪式機(jī)器人的移動性更加可靠;四足機(jī)器人有令人驚訝的能力,尤其是在復(fù)雜地形中;無人機(jī)則可對一些大的洞穴進(jìn)行全面的探測。
到?jīng)Q賽結(jié)束時,有兩個參賽團(tuán)隊分別發(fā)現(xiàn)了23件物品:Cerberus團(tuán)隊,由內(nèi)華達(dá)大學(xué)里諾分校、蘇黎世聯(lián)邦理工學(xué)院、挪威科技大學(xué)、加州大學(xué)伯克利分校、牛津機(jī)器人研究所、Flyability無人機(jī)公司,以及內(nèi)華達(dá)山脈公司的研究人員組成;CSIRO Data61團(tuán)隊,由澳大利亞聯(lián)邦科學(xué)與工業(yè)研究組織(CSIRO)的Data61部門、Emesent公司,以及佐治亞理工學(xué)院的研究人員組成。兩隊得分相同,觸發(fā)了打破平局的規(guī)則:哪支隊伍最快找到最后一件物品?最終Cerberus獲得了第一名,它只比CSIRO快了46秒。 ? ?
盡管排名第二,但CSIRO團(tuán)隊的機(jī)器人取得了一項驚人成績:它們繪制的賽道地圖與DARPA的真實地圖相差不到1%,與人類專家團(tuán)隊花了許多天繪制的地圖實際上完全匹配。這正是地下挑戰(zhàn)賽想要激發(fā)的那種實在的、基本的進(jìn)步,負(fù)責(zé)此次挑戰(zhàn)賽的DARPA項目經(jīng)理蒂姆?鐘(Tim Chung)說。
“地下發(fā)生的事情太多了,很多事情我們通常還沒有考慮太多,但如果你看看我們在地下修建的基礎(chǔ)設(shè)施數(shù)量,真的是非常龐大。”鐘對《科技縱覽》說,“在地下環(huán)境中,我們有很多能夠感知、理解和導(dǎo)航的機(jī)會,有工程集成挑戰(zhàn)以及基礎(chǔ)設(shè)計挑戰(zhàn),還有我們尚未解決的理論問題。這些都是DARPA最感興趣的問題,因為這將在5年、10年,最多15年里,改變機(jī)器人技術(shù)的面貌。”
?
《科技縱覽》當(dāng)時在路易斯維爾報道了地下挑戰(zhàn)賽決賽,近期,圍繞地下挑戰(zhàn)賽的參賽經(jīng)歷,以及該賽事對機(jī)器人技術(shù)未來的影響,我們采訪了蒂姆?鐘、CSIRO Data61團(tuán)隊負(fù)責(zé)人納文達(dá)?科特奇(Navinda Kottege)和Cerberus團(tuán)隊負(fù)責(zé)人科斯塔?亞歷克西斯(Kostas Alexis)。 ?
DARPA有幾百個項目,但大多數(shù)項目都沒有百萬美元獎金和持續(xù)多年的國際比賽。地下挑戰(zhàn)賽有何特別之處呢? 蒂姆?鐘:DARPA的理念時常會帶來一種完全不同的創(chuàng)新刺激模式。當(dāng)知道在某個領(lǐng)域即將取得突破,但不確定該突破將如何發(fā)生,而廣泛公告然后選擇方案這種傳統(tǒng)的DARPA項目模式可能會限制創(chuàng)新時,我們將為尋求創(chuàng)新而采用某種不同的模式。DARPA認(rèn)為,地下挑戰(zhàn)賽正有這樣的作用,它可以吸引機(jī)器人行業(yè)群體解決我們預(yù)期有影響的問題,比如,在嚴(yán)峻環(huán)境中的恢復(fù)力、自主性和感知力。而且你能發(fā)現(xiàn)這些技術(shù)挑戰(zhàn)交織在一起的地方就是地下。
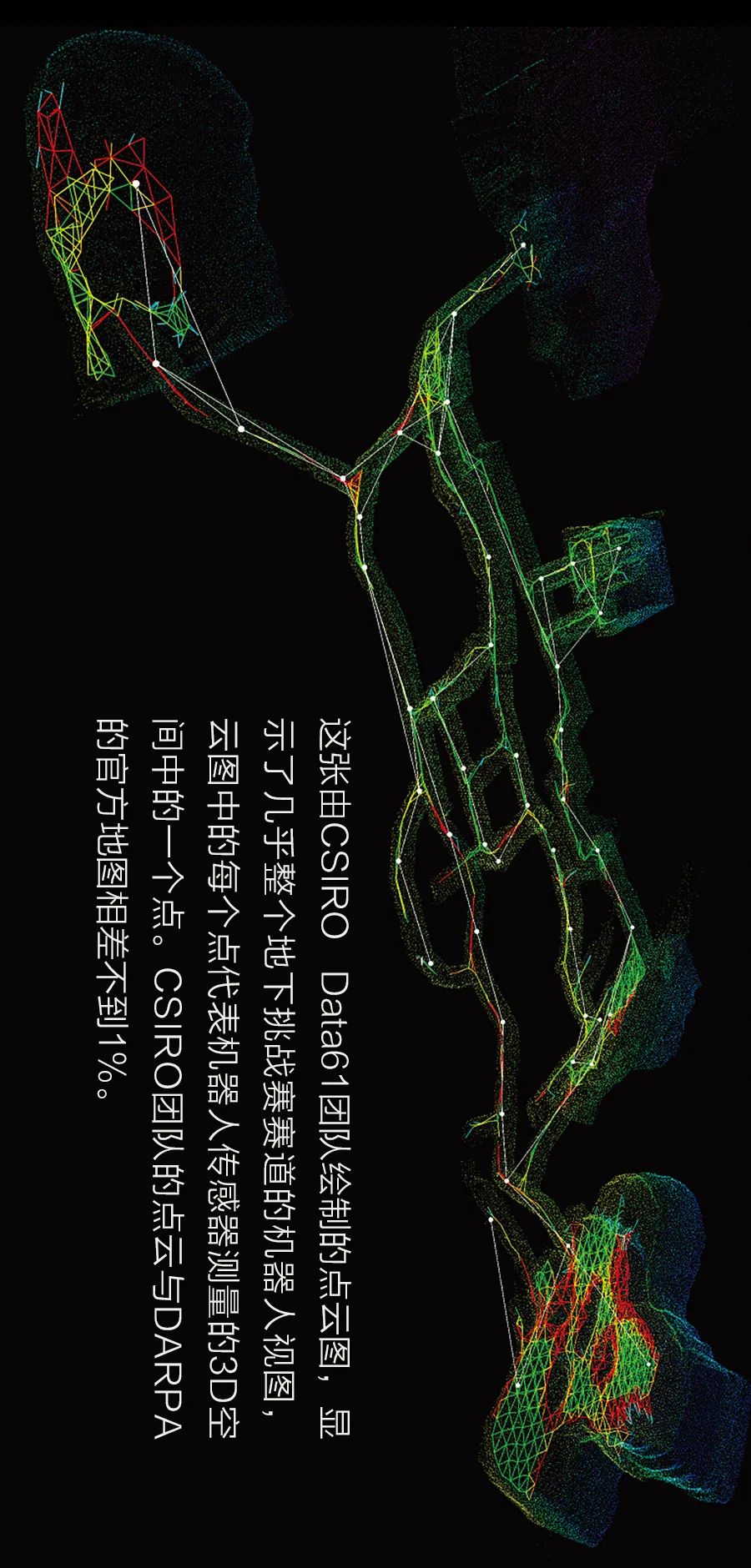
這些團(tuán)隊在自主繪制環(huán)境地圖方面的技能令人印象非常深刻,您能談?wù)剢幔?/strong> 蒂姆?鐘:我們請了一個專家團(tuán)隊,他們擁有專業(yè)的測繪設(shè)備,并花了很多天的時間制作出一張精確校準(zhǔn)真實賽道的地下挑戰(zhàn)賽賽道地圖。然后在比賽中,我們看到這些機(jī)器人在不到一個小時的時間里,幾乎完全覆蓋了整個賽道,我簡直不敢相信那些點云有多完美!(見下面點云圖)我覺得這真的是一種“加速劑”。可以信任地圖時,你就有了更多可執(zhí)行的環(huán)境感知。這不是一個已經(jīng)解決的問題,但當(dāng)你達(dá)到我們在地下挑戰(zhàn)賽中看到的精確程度,那就是一種有潛力解鎖未來各種創(chuàng)新的門戶技術(shù)。
自主性是地下挑戰(zhàn)賽的必要組成部分,但讓人參與其中依然至關(guān)重要。您認(rèn)為人會繼續(xù)成為高效機(jī)器人團(tuán)隊的必要組成部分嗎?還是說未來將是完全自主的?
蒂姆?鐘:在早期比賽中,我們看到了很多手把手的指導(dǎo),操作員給機(jī)器人發(fā)出低級指令。但各參賽隊伍很快意識到,他們需要一種更自主的方法。不過,實現(xiàn)中很難實現(xiàn)完全自主,我認(rèn)為人將繼續(xù)扮演一個很重要的角色,只不過這個角色需要進(jìn)化和轉(zhuǎn)變,專注于人類最擅長的事情。 我認(rèn)為,人從操作員進(jìn)步到監(jiān)管員,這將擴(kuò)展人-機(jī)器人團(tuán)隊能夠執(zhí)行的任務(wù)類型。在決賽中,我們看到機(jī)器人在賽道上探索和尋找人造物品,而監(jiān)管員則在忙于其他事情,甚至沒有關(guān)注機(jī)器人。這太酷了。機(jī)器人在做它們需要做的事情,讓人有時間進(jìn)行高級決策。從基本的遠(yuǎn)程遙控到“機(jī)器人做機(jī)器人的事,我做我的事”,這是一個巨大的變化。機(jī)器人必須變得能力更強(qiáng),(人類)才能從操作員過渡到監(jiān)管員。
在地下環(huán)境中,機(jī)器人還面臨哪些挑戰(zhàn)? 蒂姆?鐘:關(guān)于環(huán)境可通過性的分析和推理仍然是一個問題。機(jī)器人如果能更多地了解它們在哪里行者、在哪里繞圈飛行,將能以更快的速度通過這些環(huán)境。盡管在測繪方面它們比人快了一到兩個數(shù)量級,但機(jī)器人的行動速度仍然相對較慢。提高一個數(shù)量級將真正有助于改變局面。速度將成為決定性的促成因素,并對緊急救援場景產(chǎn)生巨大影響,那里每分鐘都很重要。
您認(rèn)為地下挑戰(zhàn)賽已經(jīng)或?qū)⒁獙C(jī)器人技術(shù)產(chǎn)生哪些影響? 蒂姆?鐘:在我看來,地下挑戰(zhàn)賽中使用的許多技術(shù)正在實現(xiàn)產(chǎn)品化和商業(yè)化,這意味著機(jī)器人到達(dá)緊急救援人員手中的時間已經(jīng)大大縮短。這些已經(jīng)發(fā)生,而且比賽期間正在發(fā)生,這真的是一個巨大的影響。 ? ?
機(jī)器人在地下操作有哪些困難和重要性?
納文達(dá)?科特奇:事實上,我們身處地下環(huán)境是挑戰(zhàn)的一方面,也是一個非常重要的方面,但如你把它分解來看,地下挑戰(zhàn)賽意味著我們身處的環(huán)境中,GPS不可用,無法通信,我們面臨著非常困難的移動性挑戰(zhàn)。在其他許多情形中也會遇到這些事情,例如,福島核事故雖然不是發(fā)生在地下,但要想派機(jī)器人進(jìn)入,通信是一個巨大的問題。再比如亞馬遜雨林,在那里也會遇到類似的通信和移動性困難。因此,我們開發(fā)的不斷成熟的每項組件技術(shù)都將在其他許多領(lǐng)域得到應(yīng)用,而不僅限于地下。
在人-機(jī)器人團(tuán)隊中,人的恰當(dāng)位置在哪里? 納文達(dá)?科特奇:人有兩個極端的位置。一個是你按下按鈕,機(jī)器人就會去做它們的事情;另一個是我們所說的“人在回路中” (human in the loop),因為機(jī)器人大體上是通過高級命令實現(xiàn)遠(yuǎn)程控制的。但是,如果人離開回路,回路就會中斷,系統(tǒng)就會停止,在脆弱的通信中,我們經(jīng)歷過這種情況。這中間地帶是“人在回路上”(human on the loop)的概念,即由一個監(jiān)管員設(shè)置任務(wù)級目標(biāo),但如果人離開回路,回路仍然可以運(yùn)轉(zhuǎn)。人的價值增加了,因為他們能更好地概覽整個場景中發(fā)生的事情,這是人非常擅長的事情。 ?
地下挑戰(zhàn)賽對機(jī)器人技術(shù)的發(fā)展有哪些影響?
納文達(dá)?科特奇:要使現(xiàn)場機(jī)器人取得成功,需要許多項技術(shù)協(xié)同運(yùn)行。我想這就是非常復(fù)雜的地下挑戰(zhàn)賽迫使我們做的事情。能夠在真實場景中可靠地部署機(jī)器人這個整體概念,對我們來說是關(guān)鍵。回顧我們團(tuán)隊的發(fā)展,3年前我們有一些很酷的零散技術(shù),但如果沒有人去維護(hù),我們的機(jī)器人系統(tǒng)的可靠工作時間無法超過。這是我們?nèi)〉玫淖畲筮M(jìn)步之一,現(xiàn)在繼續(xù)這項工作時,我們不必再考慮如何部署機(jī)器人,也不用擔(dān)心如果我們10分鐘不管它們,它們會不會毀了自己。為了在地下挑戰(zhàn)賽取得成功,我們不得不設(shè)計和制造魯棒可靠的系統(tǒng),正因如此,我們才擁有了這樣的技術(shù)成熟度。下一步開始關(guān)注的問題是:當(dāng)你擁有一支可靠的自主機(jī)器人戰(zhàn)隊,你能做什么? ?
? 您的機(jī)器人團(tuán)隊繪制的賽道地圖與DARPA官方地圖相差不到1%,真是太了不起了。 納文達(dá)?科特奇:最后一場比賽剛結(jié)束,DARPA聘請繪制地下挑戰(zhàn)賽賽道真實地圖的公司立刻聯(lián)系了我。他們使用非常昂貴的設(shè)備,花了100個工時才制作出他們的地圖,他們想知道我們究竟是如何在不到1個小時的時間里用一群機(jī)器人繪制出地圖的。這是個好問題!但要知道,我們這1小時的繪圖15年研發(fā)的結(jié)果。 理論上可行與現(xiàn)實世界中切實可用是不一樣的。在早期階段,我們的軟件是成功的,我們認(rèn)為它達(dá)到了所有的理論里程碑。后來我們開始把它應(yīng)用到現(xiàn)實世界,在非常困難的環(huán)境中進(jìn)行測試,在那里開始尋找它出現(xiàn)問題的各種臨界情況。基本上,在過去的十幾年里,我們試圖盡可能多地突破繪圖系統(tǒng)的極限,使它變成了一個真正設(shè)計精良的解決方案。老實說,看到我們繪圖系統(tǒng)的成果時,我們?nèi)匀粫械襟@訝! ?
? 是什么讓您決定參加地下挑戰(zhàn)賽? 科斯塔?亞歷克西斯:激勵每個參賽人員的是對自主機(jī)器人的理解,這項挑戰(zhàn)賽是極其困難和有價值的。我們知道,如果有人陪伴或遙控,機(jī)器人系統(tǒng)可以在這些環(huán)境中運(yùn)行,但我們也知道,我們距離完全自主還很遠(yuǎn)。而且我們明白機(jī)器人代替人類進(jìn)入危險場景的價值。正是這種社會影響和技術(shù)挑戰(zhàn)的結(jié)合吸引了我們,尤其是在這樣一個競爭環(huán)境下,你不能只在實驗室里工作、寫論文,你必須開發(fā)出一種能一直堅持到底的東西。
對您的團(tuán)隊來說,地下挑戰(zhàn)賽最具挑戰(zhàn)性的部分是什么? 科斯塔?亞歷克西斯:我們目前可以在類似于辦公環(huán)境的正常場景中操作機(jī)器人,但地下挑戰(zhàn)賽提出了許多挑戰(zhàn)。首先,依靠與機(jī)器人的通信是不可行的。其次,地形也非常復(fù)雜。通常,對機(jī)器人困難的地形對人來說可能很容易,但面對天然洞穴地形時,我第一次覺得這對人類來說也是一個挑戰(zhàn)。第三,挑戰(zhàn)賽擁有的是一公里的環(huán)境規(guī)模。機(jī)器人必須在其自主性和功能性方面表現(xiàn)出一定程度的魯棒性和智能性,而當(dāng)時最先進(jìn)的機(jī)器人技術(shù)也無法做到這一點。地下挑戰(zhàn)賽很了不起的一點是,DARPA在一開始時就知道機(jī)器人技術(shù)尚不具備這種能力,但依然堅持要我們在接下來的3年里,打造一支有競爭力的機(jī)器人團(tuán)隊。我認(rèn)為這種方法對所有參賽團(tuán)隊都很有效,對加速研究有著極大的推動作用。
隨著機(jī)器人變得更加自主,人將發(fā)揮哪些作用? 科斯塔?亞歷克西斯:事實上,現(xiàn)在我們可以從機(jī)器人那里得到非常好的地圖,我們可以進(jìn)行目標(biāo)檢測,等等。但是,我們沒有辦法將環(huán)境中的所有物體關(guān)聯(lián)起來,與物體進(jìn)行可能的交互。因此,盡管我們可以通過機(jī)器人繪制出令人驚嘆、漂亮、精確的地圖,但推理仍是薄弱環(huán)節(jié)。 時間非常關(guān)鍵。如果我們要執(zhí)行一項任務(wù),在沒有時間限制的情況下,要想對一個地方進(jìn)行完全探測和覆蓋,可能不需要人參與,完全可以實現(xiàn)自動化。但如果時間是一個限制因素,而我們又想盡可能多地探索,那么人利用數(shù)據(jù)推理的能力是非常有價值的。即使有時我們能讓機(jī)器人表現(xiàn)得和人一樣好,但這種能力也不一定能轉(zhuǎn)變到新的環(huán)境。 ?
? 另一方面是社會因素。我們制造機(jī)器人來為我們服務(wù),對于所有這些關(guān)鍵操作,作為一名機(jī)器人專家,我知道是人在做最后的決定。 您認(rèn)為地下挑戰(zhàn)賽能夠解決機(jī)器人技術(shù)遇到的重要挑戰(zhàn)嗎? 科斯塔?亞歷克西斯:有一件事,我為我的團(tuán)隊感到非常自豪,那就是地下挑戰(zhàn)賽證實,在任何條件下,都可以部署腿式機(jī)器人系統(tǒng)。(Cerberus團(tuán)隊在決賽中部署了瑞士機(jī)器人公司ANYbotics的4個ANYmal C四足機(jī)器人。)在地下挑戰(zhàn)賽之前,我們知道腿式機(jī)器人在研究領(lǐng)域非常出色,但現(xiàn)在我們還知道,如果需要應(yīng)對復(fù)雜的地面或地下環(huán)境,那么把腿式機(jī)器人與無人機(jī)結(jié)合起來,可以做得更好。 ?
地下挑戰(zhàn)賽推動了一些技術(shù)的發(fā)展,我們什么時候才能看到實際的應(yīng)用?
科斯塔?亞歷克西斯:我認(rèn)為通過地下挑戰(zhàn)賽實現(xiàn)商業(yè)化的速度比通常的研究活動要快得多。我的觀點,時間尺度可以按月計算,也許是一年左右,不會是很多年,通常我在這方面比較保守。 在救災(zāi)方面,我們關(guān)注的是責(zé)任。我們要系統(tǒng)達(dá)到幾乎100%可靠。這就涉及很多方面,因為你要展示、認(rèn)證和保證你的系統(tǒng)能夠在各種不同用例中工作。關(guān)鍵的問題是:你能信任它嗎?這需要很長時間。DARPA通過地下挑戰(zhàn)賽打造了一個廣闊的前景。我相信會找到實現(xiàn)這一愿景的途徑,但在用于救災(zāi)之前,我們將首先在工業(yè)中看到這些機(jī)器人。 作者:Evan Ackerman
?
編輯:黃飛
?









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論