請各位大神指導,移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉移的?
2016-07-26 13:33:14
將會遭到哪些改變,我們最終將如何重新定義我們和機器人彼此的身份?為回答這個問題,《機器人與未來》在書中每一章講述了一種機器人可能的未來,首先通過一個未來發(fā)生的機器人故事開題,讓讀者產生身臨其境的體驗感并
2015-12-29 14:56:59
步,然后右轉90度,直走100步。你會發(fā)現(xiàn)走的特別完美。接著你在用同樣的方法控制機器人,你會發(fā)現(xiàn)機器人好像不怎么聽話,告訴了直走,走著走著就斜了,說好了拐90度彎的,還沒拐到90度就停止了。這就是虛擬與...
2021-09-01 07:12:05
,包含六
自由度工業(yè)
機器人、智能視覺檢測系統(tǒng)、PLC控制系統(tǒng)及一套供料、輸送、裝配、倉儲機構,可以實現(xiàn)對高速傳輸?shù)?/div>
2021-07-01 08:20:18
。.??有些品質是機器人應該遵循的,它應該有一個大腦(存儲器或控制器)它應該有一個 ARM。(顯然是用來裝東西的)它應該有一個運動的驅動機制。(像自由度,運動和其他)它應該有一個末端執(zhí)行器。(手指狀
2022-03-31 10:31:31
人類因有眼睛、鼻子、耳朵等感覺器官,而獲得了視覺、聽覺、味覺、嗅覺等不同的外部感覺,機器人也因有傳感器而看見、聽見……這個世界。
2020-08-05 07:55:18
機器人使用的電纜要求很高,不僅具有強大的信號輸送能力,同時還具有很好的耐磨性等特點,才能保證機器人發(fā)揮較好的作用。 一.信號能力強 機器人工作主要是根據(jù)計算機發(fā)出的指令工作,然而計算機信號
2019-04-12 15:51:59
`機器人的主要技術參數(shù) 機器人的技術參數(shù)反映了機器人可勝任的工作、具有的最高操作性能等情況,是設計、應用機器人必須考慮的問題。機器人的主要技術參數(shù)有自由度、分辨率、工作空間、工作速度、工作載荷等
2017-08-15 14:00:52
機器人的定義是什么?機器人優(yōu)點和缺點是什么?機器人是由哪些部分組成的?工業(yè)機器人的應用有哪些?
2021-07-05 06:48:21
安靜高效的機器人正在接管——阻止它們已經(jīng)太遲了。不,這不是機器人世界末日另一個可怕的故事。這是關于您下一設計硬件預算和規(guī)劃面臨威脅的問題。雖然您無法阻礙技術變革,但是您可以預測其影響。
2019-07-17 08:08:16
機器人的移動通常是從管理機器人總體任務進度的中央處理器發(fā)出位置變化請求時開始的。導航系統(tǒng)通過制定行程計劃或軌跡以開始執(zhí)行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。
2019-09-10 10:44:32
機器人運動控制技術,盡管運動控制器需求增長迅速,但即便到明年,整體市場規(guī)模仍不到 10 億元。高性能工業(yè)機器人作為核心裝備,一直被國外品牌壟斷,而運動控制器的自主可控一直是國產機器人領域的一大痛點
2021-07-28 07:33:29
(perception-intensive)”型任務 美國國防供貨商雷神(Raytheon)的機器人Gaurdian,結合了該公司在機器人外殼骨架上的專門技術經(jīng)驗,并配備高扭矩馬達,能藉由液壓控制執(zhí)行高速動作 日本
2013-07-15 14:48:19
4自由度小機器人,容易DIY視頻1視頻2http://v.youku.com/v_show/id_XMTcwMzE3Mzg0NA==.html
2016-09-06 22:53:25
ZN-IRB01ABB機器人實訓平臺一、概述ZN-IRB01ABB機器人實訓平臺包含六自由度工業(yè)機器人、傳感器檢測系統(tǒng)、PLC控制系統(tǒng)及一套供料、輸送、壓鑄、焊接機構,可以實現(xiàn)對傳輸?shù)墓ぜM行碼垛
2021-07-01 08:57:20
開發(fā),嵌入式linux開發(fā),熱愛電子制作 產品介紹:HL-ROBOT人形機器人是由海靈智電設計研發(fā)的一款仿生人形機器人,共有17個自由度,采用鋁合金結構開模加工而成,配17個高精度的數(shù)碼舵機。能夠完成
2016-03-10 14:23:46
組合,實現(xiàn)對高速傳輸線上的不同物料進行快速的檢測、組裝。為了方便實訓教學,系統(tǒng)進行了專門的設計,可以完成各類機器人單項訓練和綜合性項目訓練,可完成各類機器人單項訓練和綜合性項目訓練。可以進行六軸機器人示教、定位、抓取、裝配等訓練,包含六自由度工業(yè)機器人、智能視覺檢測系統(tǒng)、PLC控...
2021-07-01 10:07:13
對不同物料進行快速的檢測、組裝。為了方便實訓教學,系統(tǒng)進行了專門的設計,可以完成各類機器人單項訓練和綜合性項目訓練,可完成各類機器人單項訓練和綜合性項目訓練。可以進行六軸機器人示教、定位、抓取、裝配等訓練,ZN-980B機器人搬運碼垛工作站包含六自由度工業(yè)機器人、智能視覺檢測系統(tǒng)、PLC控制系統(tǒng)及一套供料、輸送、裝
2021-07-01 12:48:23
行走機構。大多數(shù)工業(yè)機器人有3~6個運動自由度,其中腕部通常有1~3個運動自由度;驅動系統(tǒng)包括動力裝置和傳動機構,用以使執(zhí)行機構產生相應的動作;控制系統(tǒng)是按照輸入的程序對驅動系統(tǒng)和執(zhí)行機構發(fā)出指令信號
2010-05-18 22:03:02
相比于之前的機器人,NAO機器人穿上人類的服裝,那就像是一個真人出現(xiàn)在我們面前似得,NAO機器人的四肢設計的非常的靈活,具有多個自由度的身體,使得NAO機器人能夠靈敏的行走以及參加一些活動。NAO
2015-02-13 15:43:24
項目名稱:漁業(yè)衛(wèi)士-基于圖像識別的多自由度水下機器人試用計劃:1、申請理由希望早日接觸、應用國產的鴻蒙系統(tǒng)。2、項目名稱漁業(yè)衛(wèi)士-基于圖像識別的多自由度水下機器人3、計劃(1)約三個月時間,應用該款
2020-09-25 10:11:50
傳感器。四足機器人重2.2kg,有8個自由度,四條腿上都搭配了足底傳感器。其他零件由3D打印和現(xiàn)成的零件構成,可以做出重量輕且低成本的機器人,這也使得其他研究團隊可以快速開發(fā)和復制此項目。本文系統(tǒng)地描述了
2021-09-13 06:33:53
多自由度人形雙足舞蹈機器人套件檢測教程——機器人開發(fā)系列配套資料:https://www.fengke.club/GeekMart/su_fV1WzKsGQ.jsp 配套視頻:https
2022-04-22 14:14:08
Tran***ot ROS教育機器人如果你熱衷于編程探索和DIY創(chuàng)作,恰好又在尋找一款可以讓你自由發(fā)揮,二次開發(fā)的ROS平臺,那么我們今天體驗的這款Tranbot ROS教育機器人將會非常適合你。對于這款機器人的裝箱清單,8個字形容:物資豐富,品質過硬。
2021-11-25 20:33:50
多自由度人形雙足舞蹈機器人——瘋殼·機器人開發(fā)系列套件檢測教程內容簡介本文檔主要介紹在如何驗證多自由度人形雙足街舞機器人套件正常,包括具體線路連接,實驗現(xiàn)象驗證。具體分為以下幾個步奏。1、機器人
2022-08-12 15:55:14
進行簡化,采用加藤一郎結構,為雙足步行機器人下肢配置了 6個自由度。本作品是基于SC89F5162單片機的六自由度雙足機器人,由機械結構、舵機控制模塊和主控核心上位機組成。可以完成直立,行走,臥倒,翻滾
2014-01-02 14:31:52
的視覺控制系統(tǒng),在五自由度的機械臂進行建模推導與控制設計實現(xiàn)。項目計劃①根據(jù)文檔,對RK1808人工智能計算棒AI加速器快速入門②通過學習RK1808人工智能計算棒AI加速器,熟悉開發(fā)
2019-09-23 15:39:37
ZNRX-J2型 工業(yè)機器人柔性自動化生產線實訓系統(tǒng)一、設備概述工業(yè)機器人柔性自動化生產線實訓包含多臺六自由度工業(yè)機器人、PLC控制系統(tǒng),工業(yè)機器人在測量檢驗、包裝、分揀處理、搬運、碼垛、填裝、機器
2021-07-01 13:07:55
,“小i機器人在從單一智能機器人產品轉移到以多種交互模式、多渠道、知識庫構建和管理、數(shù)據(jù)挖掘和分析等綜合應用的解決方案上,已經(jīng)走在了世界的前列。” 如今,在軟洽會這樣一個備受矚目的舞臺上,小i又開始有了
2014-04-22 16:10:36
,自由度越高,也就更顯靈活。先進的伺服器具有高扭力、高轉速、高穩(wěn)定、反應靈敏、無抖動、轉動角度大、耐沖擊等優(yōu)點。有的人形機器人已能完成手臂后擺90度等高難度動作,還擁有觸覺和手眼配合能力,會抓物品、開門
2016-05-12 09:55:07
PAGE\* MERGEFORMATPAGE\* MERGEFORMAT 1信息技術(六年級)智能機器人課題一、你好機器人——機器人常識目標1、認識機器人并了解機器人的發(fā)展與未來。2、了解機器人仿真
2021-09-01 06:17:46
和導演們向觀眾提出了這樣的問題:機器人究竟是英雄,惡棍,或者只是應用程序? Stephen Hamel對第一財經(jīng)記者表示:“讓機器人賦予情感,在人類的世界中同樣具有喜怒哀樂,越來越成為好萊塢電影的主流
2016-11-22 11:10:19
航模上最常用的就是三角翼混控(其實叫升降副翼混控),因為三角翼將副翼和水平尾翼合為一體了,尾翼的兩個舵面既控制升降,也控制橫滾(左旋/右旋),所以要想滿足飛手的操作習慣,必須用到混控,即roll通道和pitch通道能夠自由切換對尾翼兩個舵面的控制。一般混控在v型尾翼和直升機有應用。
2022-02-16 06:14:49
` 本帖最后由 大連云港 于 2015-1-19 11:02 編輯
工業(yè)機器人是面向工業(yè)領域的多關節(jié)機械手或多自由度的機器人。工業(yè)機器人是自動執(zhí)行工作的機器裝置,是靠自身動力和控制能力來實現(xiàn)
2015-01-19 10:58:38
龍人四足機器人是一種仿生機器人,由Openduino控制板控制,有四條腿,每條腿兩個自由度,由兩個舵機驅動,能實現(xiàn)兩種步態(tài)行走。配有三個超聲波,實現(xiàn)大角度智能避障。標準演示程序有5個可愛的表演動作。重要技術點: 四足機器人的行走步態(tài)設計、舵機的梯形速度控制、多路舵機的協(xié)調控制
2016-03-24 16:17:53
)?速度空間范圍不同:如圖 4.1所示,在之前的文章《兩輪差速驅動機器人運動模型及應用分析》中對兩輪差速驅動機器人的速度空間做了分析,其只有2個自由度,不能沿著機器人坐標系Y軸運動,所以速度空間是一個矩形平面,效果如圖 4.1(a)所示;而基于上述分析可知,全向輪平臺有3個自由度,既可縱向、橫.
2021-08-30 09:15:18
了機器人發(fā)展五年計劃,旨在鞏固其在機器人領域的世界領先地位。 歐洲 歐盟第七研發(fā)框架計劃已經(jīng)投入了高達6億歐元的經(jīng)費于工業(yè)機器人的研究制造,未來研究經(jīng)費投入將達到140億歐元。于此同時
2016-01-28 15:21:21
`工業(yè)機器人是面向工業(yè)領域的多關節(jié)機械手或多自由度的機器裝置,它能自動執(zhí)行工作,是靠自身動力和控制能力來實現(xiàn)各種功能的一種機器。它可以接受人類指揮,也可以按照預先編排的程序運行,現(xiàn)代的工業(yè)機器人還可
2017-08-09 16:30:09
`力泰科技資訊:搬運機器人是比較常見的一種機器人,一般選擇3-6軸會比較多一點。軸數(shù)更多意味著自由度更高,更靈活,在較狹小的空間也能靈活運動,這就意味著6軸搬運機械手的造價相對于軸數(shù)少的多關節(jié)機器人
2018-08-14 09:37:05
的?眾所周知,最重要因素就是軸數(shù)。機器人軸的數(shù)量決定了其自由度,自由度越高機器人就越接近人手的動作機能,通用性就越好;但是自由度越多,結構越復雜,對機器人的整體要求就越高,這是機器人設計中的一個矛盾。新松
2018-10-12 11:02:18
、搬運或其他動作的多自由度機械手臂。 相對于單軸機器人,多軸機器人有更多的自由度,可以在一定的空間內自由運動,完成幾乎任何角度和軌跡的運動作業(yè),而更多的關節(jié)意味著它可以從任意角度拿取工件,而不像單軸
2017-11-23 10:17:45
一前言針對機器人相關專業(yè)的教學需求,商飛信息科技開發(fā)出此開源六自由度協(xié)作機器人實驗平臺。該平臺有以下幾大特色機器人本體采用自主設計的3Kg負載六自由度協(xié)作機器人,機器人每個關節(jié)集成電機、減速器和驅動
2021-09-07 07:10:14
工業(yè)生產中,傳統(tǒng)的工業(yè)機器人在生產適用性上已經(jīng)不能滿足日益增長的多任務需求,多軸機器人順勢發(fā)展,趨勢明顯。多軸機器人是能夠實現(xiàn)自動控制的、可重復編程的、多自由度的、運動自由度建成空間直角關系
2020-07-29 06:57:04
?舉例: 工業(yè)機器人系統(tǒng)由三大部分六個子系統(tǒng)組成,1、三大部分是:(1)機械部分(2)傳感部分(3)控制部分2、六個系統(tǒng)(1)驅動系統(tǒng),要使用機器人的運行起來,就需給各個關節(jié)即每個運動自由度安置
2016-03-06 12:56:19
性能與可靠的機械控制性能的同時保證,才能在短時間內準確尋找到火源并滅火回家。在此以ARM9處理器為核心,對基于嵌入式系統(tǒng)的智能滅火機器人進行了設計。本文將從硬件和軟件方面講述智能滅火機器人控制器的實現(xiàn)方法,并且給出了機器人滅火的具體實驗,驗證了方案的可行性,為智能滅火機器人的進一步研究提供了平臺。
2019-07-31 06:23:18
!” 2、你的溫暖不僅萌化了我,還萌化了整個世界!——《超能作戰(zhàn)隊》 “你好,我叫大白,你的私人健康助理。” 3、在孤獨中,他們相遇,驗證一段毫無企圖的愛情。——《機器人總動員》 “伊娃,我
2015-11-27 10:01:45
移動機器人是機器人的重要研究領域,人們很早就開始移動機器人的研究。世界上第一臺真正意義上的移動機器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它裝備了
2020-05-14 08:15:00
如題。在論壇有看到家用機器人的2014年度十大款類型。比較感興趣,不知道有沒有大神了解比較全面的家用機器人知識?
2015-02-11 11:16:00
積極響應,踴躍報名。十四家業(yè)內知名機器人企業(yè)匯聚在此,通過媒體發(fā)布和消費者現(xiàn)場體驗相結合的新穎形,發(fā)布各自最新科技成果。 本期張江發(fā)布籌備之初就增了票選環(huán)節(jié)。“服務機器人與我們的生活息息相關,大家票選
2016-05-05 21:45:38
1.雙驅直流電機電機pid控制2.兩自由度舵機超聲波測障3.紅外避障4.無線2.4g上位機波形顯示5.五自由機械手12路pwm控制器
2016-07-15 01:53:40
。可以進行六軸機器人示教、定位、抓取、裝配等訓練,包含六自由度工業(yè)機器人、智能視覺檢測系統(tǒng)、PLC控制系統(tǒng)及
2021-07-01 11:48:31
、抓取、裝配、入庫等訓練,2、工業(yè)機器人與視覺實訓平臺包含六自由度工業(yè)機器人、智能視覺檢測系統(tǒng)、PLC控制系
2021-07-01 06:38:35
130萬個工業(yè)機器人將被引入世界各地的工廠,歐洲工廠的比例最高。行業(yè)在以下五個領域考慮使用工業(yè)機器人: 工業(yè)機器人類別介紹人機交互的示例之前,讓我們看看今天在工廠自動化中使用的前三種機器人。工業(yè)機器人處理
2019-03-06 06:45:09
機器人1、機器人本體1)具有6個自由度,串聯(lián)關節(jié)型工業(yè)機器人;2)重復定位精度:±0.01mm;3)承重能力:3kg;4)水平到達距離: ≥580mm;5)重量: ≥27kg;6)各軸運動范圍J1軸≥±180J2軸≥-155°/+5°J3軸≥-25°/+240°J4軸≥±180°J5
2021-07-01 11:06:26
工業(yè)機器人一般由主構架(手臂)、手腕、驅動系統(tǒng)、測量系統(tǒng)、控制器及傳感器等組成。 1圖是工業(yè)機器人的典型結構。機器人手臂具有3個自由度(運動坐標軸),機器人作業(yè)空間由手臂運動范圍決定。手腕是機器人
2015-01-19 10:36:12
)對給定機械臂,己知各關節(jié)角矢量g(f)=[gl(t),g2(t),......gn(i)]',其中n為自由度。求末端操作器相對于參考坐標系的位置和姿態(tài),稱之為運動學正問題。在機器人示教過程中。機器人
2017-12-15 10:25:19
可以在礦山、深海等惡劣環(huán)境代替自然人進行工作,還可以進入人們的日常生活提供服務,甚至成為人們的朋友。 在工業(yè)機器人領域,機器人的定義已悄悄地發(fā)生了變化,不再局限于固定式的雙自由度機械手或三自由度機械手
2015-02-03 10:51:09
必須考慮的問題。機器人的主要技術參數(shù)有自由度、分辨率、工作空間、工作速度、工作載荷等。1、自由度機器人具有的獨立坐標軸運動的數(shù)目。 機器人的自由度是指確定機器人手部在空間的位置和姿態(tài)時所需要的獨立運動
2018-10-12 10:16:22
積極響應,踴躍報名。十四家業(yè)內知名機器人企業(yè)匯聚在此,通過媒體發(fā)布和消費者現(xiàn)場體驗相結合的新穎形,發(fā)布各自最新科技成果。 本期張江發(fā)布籌備之初就增了票選環(huán)節(jié)。“服務機器人與我們的生活息息相關,大家票選
2016-05-04 23:52:32
作為一個朝九晚五的上班狗。每天累死累活。家里都快成豬窩了。有大神推薦下掃地機器人么?我剛看了另一個帖子掃地機器人十大排名什么的。還是懵里懵懂,求選購小技巧哈。。。
2015-01-21 09:42:14
教育機器人搬運碼垛套件采用Openduino龍人寶貝機械手完成不同色塊的搬運碼垛任務。Openduino龍人寶貝機械人手由兩輪差動移動平臺和四自由度機械手的組成,能夠方便地外擴各種傳感器,完成各種搬運碼垛作業(yè)任務。機器人采用框架結構,拆裝方便。
2016-03-29 10:22:15
導航,前置超聲波傳感器對料塊進行方向和距離定位,安裝在手爪的顏色傳感器識別料塊顏色進行分類,三自由度機械手完成碼垛任務。重要技術點: 機器人循線、機械手運動控制、超聲波測距定位和顏色識別。`
2016-04-01 14:18:48
關于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
顯示工作狀態(tài);微信聯(lián)上掃地機器人可以進行查詢操作,可以向掃地機器人推送操作指令。 五 應用案例展示愛潔客根據(jù)開發(fā)快提供的的智能化方案,采用WiFi模塊和ET-iLink聯(lián)技術,快速實現(xiàn)智能控制。——————掃地機器人硬件調試場景————————————微信操作界面——————`
2017-05-27 13:31:20
一、項目說明 在21世紀的今天,勞動力成本已經(jīng)越來越貴,如何提高生產效率同時降低生產成本已經(jīng)成為世界最主流的研究課題了。基于這個課題,我們設計了智能配送裝配機器人
2013-10-24 16:34:25
機器人能準確地、不知疲倦地完成各種簡單的重復性工作,有效提高了勞動生產率,降低了生產成本。并能替代人力在生產線上工作的多關節(jié)機械手或多自由度的機器裝置。業(yè)內稱,工業(yè)自動化生產深深的融入各個領域,生活將會
2018-09-27 15:54:21
替代。在機器人和自動化工業(yè)生產領域中,龍門式機器人即實現(xiàn)了制造過程的完全自動化,并采用了集成加工技術,適 用于機床、生產線的上下料、工件翻轉、工件轉序等, 同時其高精度夾持定位工具系統(tǒng)為機器人自動化加工
2020-11-30 09:44:15
我們設計的四自由度機器人走一定距離會走偏,要求走四米的直線,偏差不能超過五厘米,而且還要轉彎后繼續(xù)走直線,請問有什么比較好用的傳感器可以既節(jié)省時間又可以讓行走偏差縮小。
2014-08-15 15:49:53
在我的想象中機器人首先應該能自由的走來走去,然后應該能流利的與主人對話。朝著這個理想,我準備設計一個能自由行走,并且可以與人語音對話的機器人。實現(xiàn)的關鍵是讓機器人能通過傳感器感知周圍環(huán)境,并通過
2021-12-17 06:58:27
SLAM+語音機器人DIY系列:(三)感知與大腦——5.機器人大腦嵌入式主板性能對比摘要在我的想象中機器人首先應該能自由的走來走去,然后應該能流利的與主人對話。朝著這個理想,我準備設計一個能自由行走
2021-12-16 07:27:15
(A4988 和兼容)。它還支持多達 8 個末端停止器(每個電機 1 個)和一個 pwm 輸出來控制機器人工具。它還具有 5V 和 12V 輔助電源軌。Thor是一個具有六個自由度的開源和可打印機械臂。其配置
2022-07-25 07:04:10
總線數(shù)據(jù)采集卡為硬件基礎,利用Vc++6.0 設計機器人控制界面, 實現(xiàn)該機構的連續(xù)軌跡運動。1 新型五自由度并聯(lián)機器人機構原理研究的并聯(lián)機構如圖1 所示。A1~A4、B1~B4 為球副, R1~R8
2019-06-02 08:00:00
通過視覺傳感器獲取互動表演者的手臂姿態(tài),揮動雙手臂模仿表演者的動作,實現(xiàn)對機器人的仿生模擬控制。邯鄲學舞機器人由一個視覺傳感器、兩個三自由度手臂、機器人身體和視覺處理控制器等組成;該機器人通過視覺傳感器獲取互動表演者的手臂姿態(tài),揮動雙手臂模仿表演者的動作,實現(xiàn)對機器人的仿生模擬控制。
2016-03-28 11:42:25
近日, 搭載KaihongOS的“夸父”人形機器人通過OpenAtom OpenHarmony(以下簡稱“OpenHarmony”)3.2 Release版本兼容性測評并獲頒兼容性證書 。這體現(xiàn)了
2023-12-20 09:31:19
、微軟或MacOS等多種平臺上編程,全部借助最新技術設計,所以動作連貫并帶有品種多樣的傳感器。做兒童心理醫(yī)生 Nao擁有25度的自由度,動作靈活。它還配有一個慣性導航儀裝置,在移動時十分平穩(wěn),并可
2015-02-13 09:41:38
龍人六足機器人是有六條腿的仿生機器人,每條腿有兩個自由度,由兩個角度舵機控制。控制器采用Stm32機器人控制器,通過編程控制實現(xiàn)12個電機協(xié)調的控制行走,實現(xiàn)對六足昆蟲的仿生模擬。頭部有三個超聲波,實現(xiàn)大角度范圍的避障。重要技術點:六條腿協(xié)調前進 、后退、轉彎的算法,超聲波導航和避障
2016-03-23 17:49:48
龍人六足機器人龍人六足機器人是有六條腿的仿生機器人,每條腿有兩個自由度,由兩個角度舵機控制。控制器采用Stm32機器人控制器,通過編程控制實現(xiàn)12個電機協(xié)調的控制行走,實現(xiàn)對六足昆蟲的仿生模擬。頭部有三個超聲波,實現(xiàn)大角度范圍的避障。重要技術點:六條腿協(xié)調前進、后退、轉彎的算法,超聲波導航和避障
2016-03-24 16:25:46
TA6-R5協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:49:50
深圳泰科智能TB6-R10協(xié)作機器人是一款功能更強的工業(yè)級協(xié)作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業(yè)任務,可應用于工廠自動化、汽車、3C、醫(yī)療、電力、科研、教育等多個行業(yè)、多場景的自動化需求。-
2023-04-19 09:22:29
TA6-R5協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-19 10:58:47
深圳泰科智能TA6系列協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足
2023-04-19 11:14:26
GTS六自由度激光自動精準跟蹤測量儀是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間(百米級)的高性能光電測量儀器,被廣泛應用在飛機、汽車、船舶、航天、機器人、核電
2023-10-12 09:26:16
中圖儀器牽頭的國家重點研發(fā)計劃——“六自由度激光自動精準跟蹤測量關鍵技術"的項目綜合績效評價會議在深圳順利召開。本項目瞄準我國航空航天、汽車船舶、軌道交通、機器人、核電、大科學裝置等裝備制造領域
2023-10-27 11:27:00
大專生畢業(yè)設計任務書《基于PLC的五自由度噴漆機械手控制系統(tǒng)設計》。
2016-03-18 14:03:58 0
0 19自由度機器人_動作例程,感興趣的小伙伴們可以瞧一瞧。
2016-11-17 18:35:231 6自由度機器人 雙足竟步機器人研究報告 加代碼
2017-04-10 11:19:1266 本論文以螺旋理論為基礎,提出一種系統(tǒng)的結構綜合方法。根據(jù)各條支鏈對運動平臺所提供的反螺旋約束的線性關系,研究了構成五自由度并聯(lián)機器人機構的各條支鏈所有可能的運動副組合以及它們的空間幾何條件。利用這一方法,設計出一組結構對稱的五自由度并聯(lián)機器人。
2017-10-17 14:51:586 理想的少自由度并聯(lián)機構的所有分支最好具有完全相同的結構,保持結構的對稱,以滿足各向同性的要求。以單開鏈支路為單元,提出了一種新型的對稱的少自由度的并聯(lián)機器人機構。研究結果表明,該機構的運動平臺具有
2017-10-23 16:24:5015 機器人機構能夠獨立運動的關節(jié)數(shù)目,稱為機器人機構的運動自由度,簡稱自由度(Degree of Freedom),由DOF簡寫表示。
2018-01-17 10:03:20 11466
11466 積累和放大、位置反解容易等優(yōu)點, 與串聯(lián)機構在應用上形成了互補關系。目前, 對并聯(lián)機器人研究較多的是6 自由度( 6DOF) 并聯(lián)機器人, 但在某些場合2~5 個自由度即可滿足使用要求, 這類少于6 自由度
2018-10-07 10:57:005510 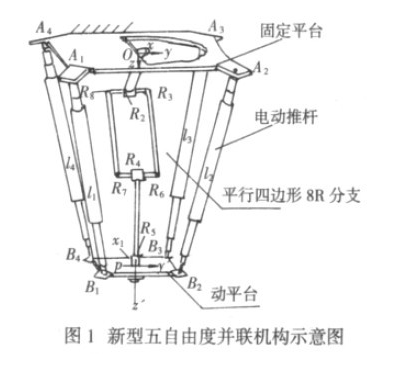
在自主研制的新型五自由度并聯(lián)機器人的基礎上, 設計完成了以微機、無刷直流電機、PCI 接口測控卡為基礎的控制系
2021-05-05 23:21:002667 
工業(yè)機器人自由度一般分為4個自由度,或者6個自由度,關節(jié)機器人主要是模仿人的手臂進行設計的。
2023-03-16 12:20:301656 隨著機器人變得日益成熟,它們已經(jīng)能夠應用到處理越來越多的工業(yè)工序。6自由度(6Dof)機器人能夠執(zhí)行復雜的動作,因而可以在許多復雜的工業(yè)任務當中展示良好的性能,比如碼垛、搬運、涂膠和焊接等。6自由度機器人可以提舉和靈活地操縱重型載荷,并通過復雜的幾何運動對載荷進行精確操控。
2023-05-18 17:34:21721 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論