伺服系統主要由伺服驅動器、編碼器和伺服電機等部件構成。伺服系統是一種自動控制系統,能使物體的位置、方位、狀態等輸出被控量跟隨輸入目標(或給定值)的變化而變化。伺服驅動器在接收下達的控制命令后,會發
2023-08-27 08:08:51 429
429 
伺服系統主要由伺服控制器、驅動電路、伺服電動機及相應反饋檢測器件組成。1.伺服系統原理當人為的給定控制信號并被伺服控制系統接收時,執行機構就會按照控制信號的指令進行一系列的運動和動作;如果不再
2023-08-27 08:08:42551 。可是在工作使用當中,難免出現一下故障。下面,為大家來分享幾種常見伺服系統的故障與處理方法,值得借鑒一下。1、LED燈是綠的,但是電機不動(1)故障原因:一個或多個方
2023-08-08 08:09:21427 伺服設備工作原理 1、伺服系統(servo mechanism)是使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化的自動控制系統。伺服主要靠脈沖來定位,基本上可以這樣理解
2023-04-19 10:47:24302 機電伺服系統廣泛應用于各種機械設備中,其種類和形式多種多樣。以下列舉一些常見的機電伺服系統:
伺服電機系統:伺服電機系統是一種利用電機控制機械運動的伺服系統,它通常包括電機、編碼器、控制器
2023-03-07 14:31:08881 交流伺服系統按照電機類型的不同可以分為兩種:異步伺服系統和同步伺服系統。根據控制器的不同,交流伺服系統又可以分為模擬伺服系統和數字伺服系統。
2023-03-07 14:20:44603 交流伺服系統通常由以下幾個主要組成部分構成:
交流伺服電機:交流伺服電機是伺服系統的核心部件之一,它的轉速、力矩和位置等運動狀態能夠受到精密控制。常用的交流伺服電機有感應電機和永磁同步電機等。
2023-03-07 14:15:361692 交流伺服系統相較于直流伺服系統具有以下優點:
轉矩和速度響應更快:交流伺服系統具有更高的帶寬和更快的響應速度,能夠更精準地控制電機的速度和轉矩。
沒有刷子磨損:交流伺服系統中
2023-03-07 09:55:50842 伺服驅動系統的基本概念伺服系統是數控機床的重要組成部分,是連接數控裝置(計算機)和機床之間的關鍵橋梁,伺服系統的性能在很大程度上決定了數控機床的性能,如數控機床的定位精度、跟蹤精度、最高移動速度等重要指標。
2023-03-06 14:49:081110 伺服系統是指利用某一部件(如控制桿)的作用能使系統所處的狀態到達或接近某一預定值,并能將所需狀態(所需值)和實際狀態加以比較,依照它們的差別(有時是這一差別的變化率)來調節控制部件的自動控制系統。
2023-03-01 18:26:141241 
伺服系統的工作原理 伺服系統(servomechanism)又稱隨動系統,是用來精確地跟隨或復現某個過程的反饋控制系統。伺服系統使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意
2023-02-08 14:11:461204 伺服系統是一個復雜且精密的重要結構件,高性能的伺服系統可以提供靈活、方便、準確、快速的驅動,而隨著伺服系統向全數字化、交流化、高度集成化以及智能化方向發展的趨勢,對服務伺服系統的線束產品也提出了新的挑戰。
2023-02-06 11:38:511148 交流伺服系統包含交流伺服驅動器和伺服電機。選用伺服系統,主要為了進行精密的定位控制,伺服驅動器在位置控制模式下運行,控制框圖如圖一所示。
2022-12-05 10:03:411337 伺服系統的發展與伺服電機的發展緊密相聯,經歷了三個主要發展階段:20世紀60年代以前,以步進電動機驅動的液壓伺服馬達或以功率步進電動機直接驅動為中心,伺服系統的位置控制為開環系統。
2022-11-30 12:36:30671 伺服系統是一種自動控制系統,能使物體的位置、方位、狀態等輸出被控量跟隨輸入目標(或給定值)的變化而變化。伺服驅動器在接收下達的控制命令后,會發出信號給伺服電機驅動其轉動;
2022-11-07 15:02:517956 伺服系統是自動化生產里面的執行機構,各類機械手想要做功,離不開伺服系統的幫助。伺服系統相比以往的其他電機,最大的優點就是控制的精度高,因為其擁有編碼器結構,可以實現閉環控制。
2022-06-02 17:03:512646 伺服系統是自動化生產里面的執行機構,各類機械手想要做功,離不開伺服系統的幫助。伺服系統相比以往的其他電機,最大的優點就是控制的精度高,因為其擁有編碼器結構,可以實現閉環控制。作為伺服系統的主體,運動
2022-06-02 14:32:292391 伺服系統是工業自動化項目中必不可少的工具,控制精度高,轉矩穩定,工作效率高,具有廣闊的發展前景。
2022-05-06 16:05:022114 會發出走路的神經信號,通過神經系統傳達給腿,傳達給腳。在實際走路的過程中,走路帶來的觸感又會通過神經系統反饋回人的大腦,形成閉路。其實,伺服系統的工作過程也是這樣的,我們簡單來說下。
2022-04-15 08:26:4414622 基于Labview的氣動伺服系統辨識程序,哪位朋友做過的幫幫忙,搭建的系統跟論文《基于 LabVIEW 的氣動比例伺服系統模型辨識研究》中的模型一樣。
2016-04-19 15:56:52
伺服電機工作原理 在伺服系統中控制機械元件運轉的發動機稱為伺服電機,它是一種補助馬達間接變速裝置。伺服電機能夠控制速度,并且伺服電機的位置精度非常的高,能夠將電壓信號轉化為轉矩和轉速以驅動控制對象
2021-08-06 17:44:5231299 控制,實現高精度的傳動系統定位,是傳動技術的高端產品。 ? ? 工作原理: ? ? ? ?安川伺服驅動器維修安川伺服驅動器是用來控制伺服電機的,作用類似于變頻器驅動交流電機,屬于伺服系統的一部分。 ? ? ? ?安川伺服驅動器采
2021-07-16 11:23:413986 伺服系統(servomechanism)又稱隨動系統,是用來精確地跟隨或復現某個過程的反饋控制系統。伺服系統使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化的自動控制系統。
2019-10-30 09:44:475620 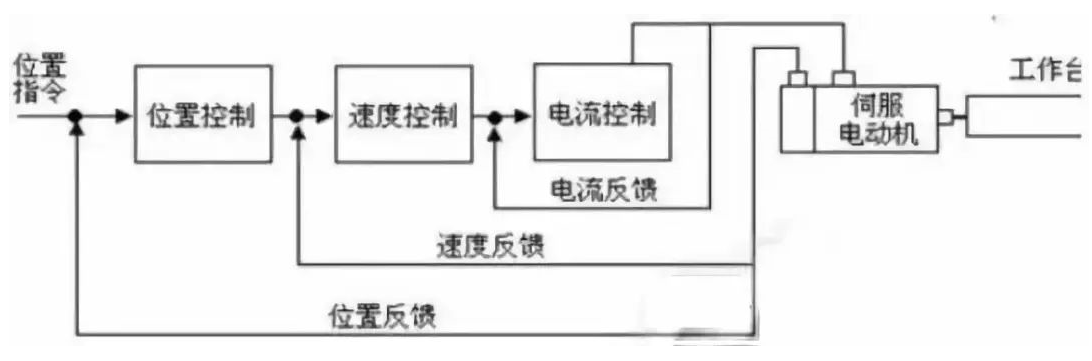
交流伺服電機克服了直流伺服電機存在的電刷、換向器等機械部件所帶來的各種缺點,特別是交流伺服電機的過負荷特性和低慣性更體現出交流伺服系統的優越性。所以交流伺服系統在工廠自動化(FA)等各個領域得到了廣泛的應用。
2019-10-30 09:37:393125 伺服系統廣泛應用于航空航天、兵器、船舶、工業自動化等領域,隨著伺服系統交流化、數字化、集成化的發展趨勢,提高伺服系統的開發效率顯得尤其重要。傳統的伺服系統開發設計主要由需求分析、設計、實現及測試
2019-04-05 11:44:00921 液壓伺服系統是使系統的輸出量,如位移、速度或力等,能自動地、快速而準確地跟隨輸入量的變化而變化,與此同時,輸出功率被大幅度地放大。
2018-08-28 17:22:1741854 本文首先介紹了伺服系統的結構組成,其次闡述了伺服系統的現狀及前景,最后分析了伺服系統發展趨勢。
2018-06-05 10:36:5620289 
本文首先介紹了液壓伺服系統工作原理及組成,其次介紹了液壓伺服系統分類及工作特點,最后介紹了液壓伺服系統的優缺點,具體的跟隨小編一起來了解一下。
2018-06-04 10:09:4010649 本文首先介紹了數控液壓伺服系統的組成,其次介紹了數控液壓伺服閥的結構和工作原理,最后介紹了液壓泵站,具體的跟隨小編一起來了解一下。
2018-06-04 09:44:5213851 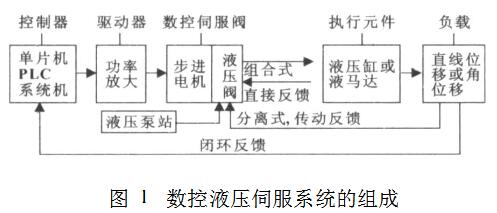
本文首先介紹看伺服系統的結構組成與工作原理,其次介紹了伺服系統分類及基本要求與特點,最后介紹了伺服系統在自動化生產中的應用。
2018-06-01 17:06:0932160 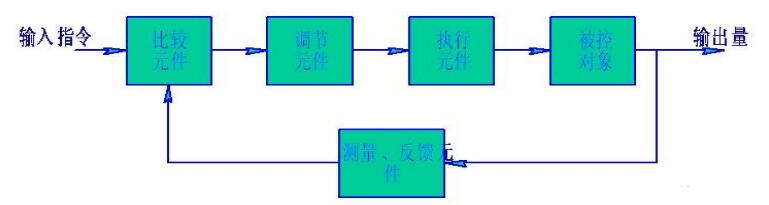
本文首先介紹了伺服系統工作原理及特點,其次介紹了伺服系統在數控機床的應用,最后介紹了數控伺服系統的作用。
2018-06-01 16:52:299329 本文首先介紹了伺服系統的結構組成及工作原理,其次介紹了 電子凸輪的結構框圖及系統組成,最后介紹了電子凸輪的伺服實現以及應用,具體的跟隨小編來詳細的了解一下。
2018-06-01 11:46:3615145 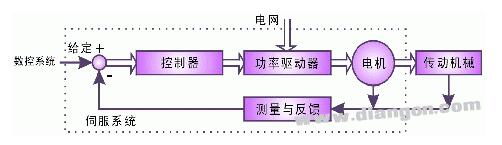
本文主要詳解主軸伺服系統,首先介紹的是主軸伺服的作用,其次介紹了主軸伺服系統的故障的表現形式,最后闡述了主軸伺服系統的故障診斷方法,具體的跟隨小編一起來了解一下。
2018-06-01 11:08:145543 本文主要詳解PLC控制伺服系統步驟,首先介紹了PLC工作原理以及PLC控制伺服電機3種方式,其次闡述了西門子PLC控制的伺服控制系統,具體的跟隨小編一起來了解一下。
2018-06-01 10:46:1249959 本文主要分析伺服系統產業鏈,首先介紹的是國際伺服系統行業發展階段,其次介紹了全球伺服系統產業現狀分析及全球伺服系統產業發展預測,最后闡述了中國伺服系統產業發展預測以伺服系統的發展未來。
2018-06-01 09:57:2412465 
本文首先介紹了伺服系統的結構組成,其次介紹了伺服系統設計要求,最后介紹了伺服系統設計步驟及方法,具體的跟隨小編一起來了解一下。
2018-05-31 11:05:515818 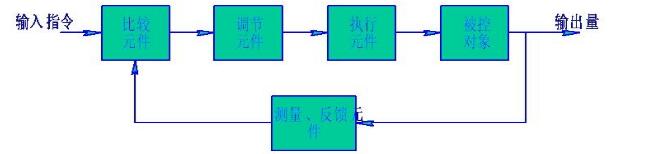
本文首先介紹了伺服系統的組成,其次介紹了伺服系統的特點、作用及分類,最后闡述了伺服系統應用領域、應用趨勢及實例,具體的跟隨小編一起來了解一下。
2018-05-31 10:35:0315026 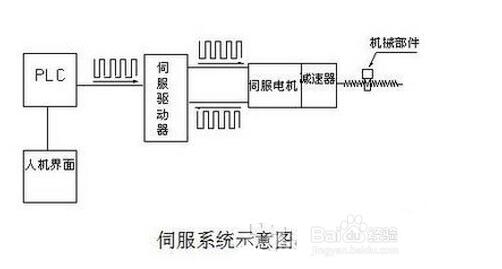
本文主要介紹什么是伺服系統,首先介紹了伺服系統的結構及特點,其次介紹了伺服系統作用、分類及性能要求和參數,最后闡述了伺服系統的發展趨勢。
2018-04-28 17:08:5631994 本文開始介紹了伺服系統的概念和伺服系統主要作用,其次闡述了伺服系統的分類與基本要求,最后闡述了伺服系統主要特點和基本組成結構。
2018-03-27 08:43:2417496 伺服驅動系統(Servo System)簡稱伺服系統,是一種以機械位置或角度作為控制對象的自動控制系統,例如數控機床等。使用在伺服系統中的驅動電機要求具有響應速度快、定位準確、轉動慣量( 使用在機電
2017-11-10 16:05:0111464 以快速、精確跟蹤為主要目標的位置伺服系統,是現代高科技各領域中不可缺少、應用十分廣泛的一種自動控制系統。在歷經開環、電氣.液壓、直流電氣伺服的發展歷程之后,現已進入交流電氣伺服迅猛發展的時代。本章
2017-11-08 09:59:21 7
7 伺服系統,亦稱隨動系統,是一種能夠跟蹤輸入的指令信號進行動作,從而獲得精確的位置、速度或力輸出的自動控制系統。大多數伺服系統具有檢測反饋回路,因而伺服系統是一種反饋控制系統。
2017-06-12 16:01:226755 步進電機伺服系統是典型的開環控制系統,指令信號是單向流動的。開環系統沒有位置和速度反饋回路,省去了檢測裝置,其精度主要由步進電機來決定,速度也受到步進電機性能的限制,系統簡單可靠,不需要像閉環伺服系統那樣進行復雜的設計計算與試驗驗證。
2017-06-12 15:32:5814571 
在伺服系統中常用具有線性特性的補償裝置(通常是補償電路),采取串聯、順饋(或稱并聯)、負反饋、正反饋,以及它們的組合形式,來改善系統的特性,提高系統的工作品質。下面分別介紹各種補償聯接形式的特點及有關注意事項。
2017-06-12 11:40:111629 
DSP在交流伺服系統中的應用
2017-02-15 17:28:1026 本文基于對輪胎成型機工作原理和對伺服系統各個組成進行分析,設計了一套成型機伺服控制系統。
2017-02-10 08:38:112282 某轉臺伺服系統方案設計
2017-02-08 02:00:2715 基于Simulink的數控伺服系統仿真和研究_劉少松
2017-01-02 15:44:462 交流永磁伺服系統技術講座第六講_八_交流永磁伺服系統的控制策略。
2016-04-26 10:47:0820 交流永磁伺服系統技術講座第六講_九_交流永磁伺服系統的控制策略
2016-04-26 10:47:089 交流永磁伺服系統技術講座第六講_七_交流永磁伺服系統的控制策略
2016-04-26 10:47:0821 交流永磁伺服系統技術講座第六講_十_交流永磁伺服系統的控制策略
2016-04-26 10:47:0810 交流永磁伺服系統技術講座第六講_十二_交流永磁伺服系統的控制策略。
2016-04-26 10:47:0818 交流永磁伺服系統技術講座第六講_十一_交流永磁伺服系統的控制策略
2016-04-26 10:47:0810 交流永磁伺服系統技術講座第四講_伺服系統的組成_三_
2016-04-26 10:47:0818 交流永磁伺服系統技術講座第二講伺服系統的組成_一_
2016-04-26 10:41:137 教學雷達伺服系統設計與制,教學雷達伺服系統設計與制作
2016-01-04 15:26:5818 伺服系統的PID控制技術下載
伺服系統的PID控制技術下載
2015-12-09 16:46:538 以TMS320F28335為核心,設計了一種高可靠性的雷達伺服系統。描述了伺服系統的組成及其工作原理,重點討論了伺服控制器的設計,分析系統的安全控制策略,并給出具體實現的控制電路
2013-01-31 14:41:5081 用液壓元件組成的伺服系統(什么是伺服系統)稱為液壓伺服系統,并且液壓伺服系統具有易于實現直線運動的速度位移及力控制,驅動力、力矩和功率大,尺寸小重量輕,加速性能好,響
2012-02-09 10:05:336574 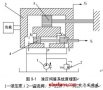
伺服系統脈沖控制電路將產生用來控 制伺服系統 的脈沖。圖示的組件顯示這個伺服系統應該產生一個90的總旋轉。
2011-11-03 16:33:193343 伺服系統按其驅動元件劃分,有步進式伺服系統、直流電動機伺服系統、交流電動機伺服系統。按控制方式劃分,有開環伺服系統、閉環伺服系統和半閉環伺服系統等。
2011-07-10 17:15:042131 
本文從設計環形倒立擺/伺服系統教學實驗儀出發,首先分析了實驗儀的總體 設計結構和目標,然后從伺服系統教學實驗儀的角度出發,分析全數字直流伺服 系統的工作原理,設計系統。該系統包括DSP最小系統、PWM的直流電機驅動 部分,A/D采樣,正反轉碼盤電路等
2011-03-09 16:29:47123 隨著計算機技術和現場總線技術的發展和成熟,也促使伺服系統的實現方式和體系結構在不斷地發展,將現場總線應用于運動控制,構成分布式控制的數字控制伺服系統日益受到人們的重視。基于現場總線的分布式伺服系統有很多優點,如連線少、可靠性高、易于系統的維
2011-01-19 10:19:111456 
本文Backstepping控制在交流伺服控制系統的應用研究,無論是對于交流伺服控制系統還是對于Backstepping控制都是一項十分有意義的工作,為將來交流伺服系統的控制策略研究提供
2010-08-23 17:05:1217 伺服系統的PID控制
伺服系統的摩擦動態特性是非常復雜的,目前已經提出了許多摩擦模型。
2010-05-04 16:05:5350
全數字伺服系統中位置環和電子齒輪的設計
摘要:分析了伺服系統中位置環和電子齒輪的工作原理,同時介紹了一種
2009-07-11 09:44:26928 
轉角-線位移式全閉環位置伺服系統及誤差分析::在一些精度要求比較高的應用場合,半閉環的位置伺服系統不能滿足要求。文中提出采用轉角-線位移式全閉環位置控制方法,光柵
2009-07-05 21:34:2121 數字比較式伺服系統
1.?數字比較系統的構成
一個數字比較系統最多可由6個主要環節組成(見圖5-38):
2009-05-07 00:12:571148 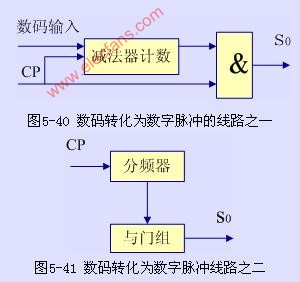
交流伺服電機的工作原理
交流伺服電機驅動是最新發展起來的新型伺服系統,也是當前機床進給驅動系統方面的一個新動向。該系統
2009-05-06 23:50:1039756 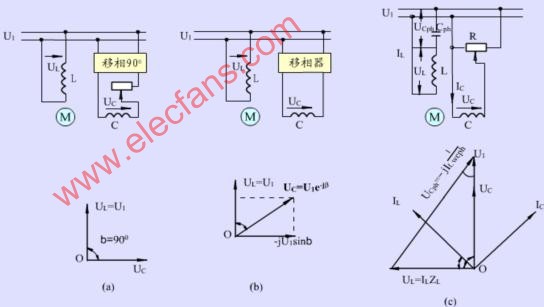
步進式伺服驅動系統工作原理
步進式伺服驅動系統主要由步進電機驅動控制線路和步進電機兩部分組成,如圖5--7所示。驅動控制線路
2009-05-06 23:44:393176 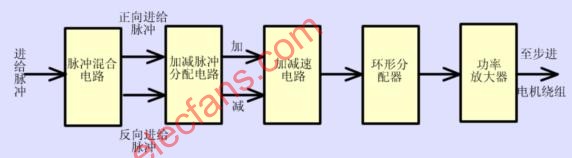
遙控伺服系統電路圖
2009-04-09 09:06:10741 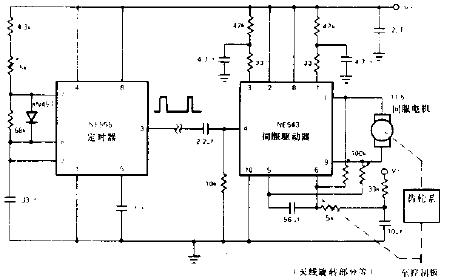
本章將詳細討論進給伺服系統的軟件硬件結構;進給伺服系統基本功能的原理及實現方法。進給伺服系統是數控系統主要的子系統。如果說CNC裝置是數控系統的“大腦”,是發布
2009-02-16 00:21:3127 數控機床的伺服系統一、 伺服系統的組成 數控機床的伺服系統按其功能可分為:進給伺服系統和主軸伺服系統。 主軸伺服系統用于
2008-12-30 16:12:5260 伺服閥的工作原理
圖2是伺服閥的工作原理圖。
2008-11-19 16:21:1814440 第4章 數控機床伺服系統4.1 數控機床伺服系統概述4.2 直 流 伺 服 系 統 4.3 交 流 伺 服 系 統4.4 位 置 檢 測 裝 置4.1 數控機床伺服系統概述
2008-09-01 23:57:103
 電子發燒友App
電子發燒友App





 ???????????????????
??????????????????? 







 工商網監
工商網監
評論