 電子發(fā)燒友App
電子發(fā)燒友App


隨著數(shù)字系統(tǒng)性能的提高,設(shè)計人員需要越來越細心地關(guān)注時鐘發(fā)生和分配電路的設(shè)計,以避免時鐘分配時序出現(xiàn)差異或不確定性。此類問題會降低系統(tǒng)性能,減少時序余裕,或?qū)е鹿δ苠e誤。為了避免時序偏移相關(guān)的問題,設(shè)計人員可以使用零延遲時鐘緩沖器。
典型同步數(shù)字系統(tǒng)使用公共時鐘來讓操作按順序執(zhí)行。此時鐘必須分配給所有順序元件,使系統(tǒng)以期望的速率運行,并通常使用閉環(huán)控制來減小時序偏移。零延遲時鐘緩沖器使用鎖相環(huán) (PLL) 來保證緩沖的時鐘輸出與參考時鐘輸入保持一致,從而確保時鐘時序近乎完美。
本文介紹零延遲時鐘緩沖器,利用 Cypress Semiconductor、Integrated Device Technology Inc. (IDT) 和 ON Semiconductor 的示例解決方案解釋其工作原理,并詳細說明如何控制時鐘偏移。本文還會探究測試方法,以確保這些器件的穩(wěn)定性。
時鐘偏移
在同步數(shù)字系統(tǒng)中,時鐘可能在不同時間到達電路的不同部分,從而導(dǎo)致時鐘偏移。時鐘偏移可能會減小時序余裕,并導(dǎo)致系統(tǒng)出現(xiàn)故障(圖 1)。
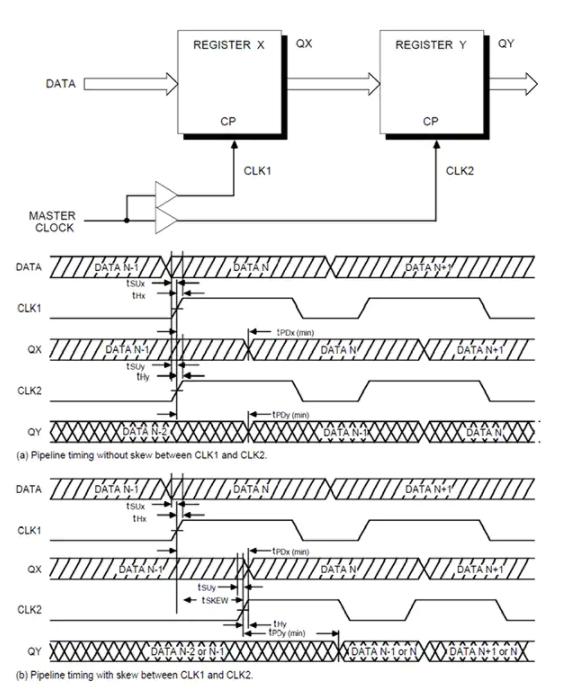
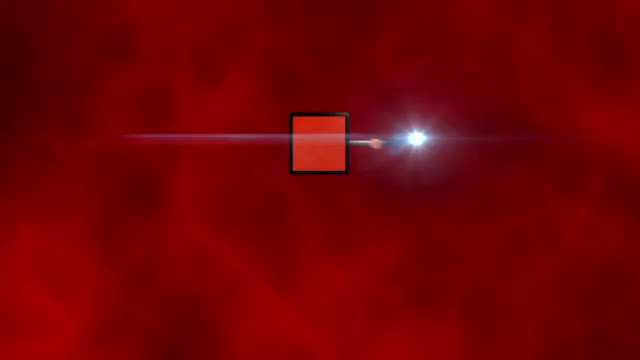
圖 1:時鐘時間偏移可能影響流水線寄存器操作的簡單示例。偏移的時鐘可能會違反建立和/或保持時間要求,導(dǎo)致輸出狀態(tài)不確定。(圖片來源:IDT)
考慮一個由兩個寄存器組成的簡單同步系統(tǒng)。數(shù)據(jù)以流水線方式通過寄存器,使得寄存器 X 的輸出 QX 成為寄存器 Y 的輸入。時鐘通過獨立緩沖器饋入寄存器,分別指定為 CLK1 和 CLK2。如果時鐘之間沒有偏移,如圖 (a) 所示,那么滿足寄存器建立 (tSUx) 和保持 (tHx) 時間要求的數(shù)據(jù)狀態(tài) N,會在寄存器 X 傳播延遲后的第一個時鐘邊沿,鎖定到該寄存器的輸出 QX 中。CLK2 上的相同時鐘邊沿導(dǎo)致 QX 的前一狀態(tài) N-1 被該寄存器 Y 讀取,并在該寄存器的傳播延遲后出現(xiàn)在輸出 QY 中。
如果 CLK1 和 CLK2 之間存在時間偏移,如圖 (b) 所示,那么當(dāng) CLK2 出現(xiàn)時,QX 可能處于轉(zhuǎn)換狀態(tài)。寄存器 Y 的輸入可能不滿足寄存器建立或保持時間要求;輸出可能不確定,從而導(dǎo)致錯誤。
為確保時鐘偏移最小,設(shè)計人員應(yīng)讓印刷電路的印制線長度匹配,選擇具有相似傳播延遲的緩沖器和其他時鐘元件,并且平衡多個時鐘源的負載。雖然這些技術(shù)有所幫助,但一般需要使用零延遲時鐘緩沖器才能獲得對時鐘偏移的良好控制。
控制時鐘偏移
引起時鐘偏移的可能原因有很多。最明顯的原因是時鐘信號在印刷電路上通過的路線長度是不同的。其他偏移來源包括:時鐘通過的有源器件傳播延遲各不相同,時鐘緩沖器的負載不同,或者緩沖器存在溫度差異。雖然可以控制其中一些影響,但設(shè)計人員經(jīng)常使用有源器件和 PLL 來將時鐘重新與參考時鐘同步。
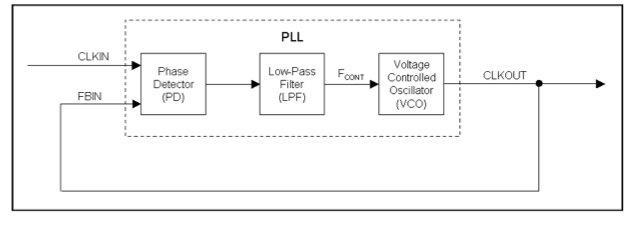
PLL 電路用于控制頻率和相位。可以配置為倍頻器、解調(diào)器、跟蹤發(fā)生器或時鐘恢復(fù)電路。每種應(yīng)用需要不同的特性,但它們都使用圖 2 所示的同一基本電路概念。
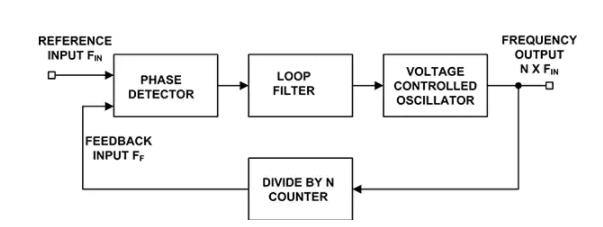
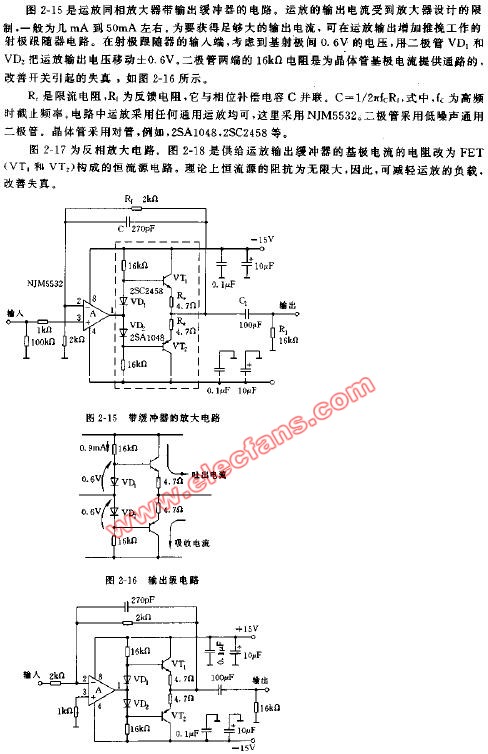
圖 2:配置為倍頻器的 PLL 框圖。它基本上是一個反饋控制系統(tǒng),控制壓控振蕩器 (VCO) 的相位。(圖片來源:Digi-Key Electronics)
圖 2 顯示了一個配置為倍頻器的基本 PLL 框圖。該電路的操作是所有 PLL 的典型操作。它基本上是一個反饋控制系統(tǒng),控制 VCO 的相位。輸入信號施加到相位檢測器的一個輸入。另一個輸入是來自 N 分頻計數(shù)器輸出的反饋信號。通常,兩個信號的頻率幾乎相同。
相位檢測器的輸出是一個與兩個輸入的相位差成比例的電壓。此信號施加于環(huán)路濾波器。該環(huán)路濾波器決定了 PLL 的動態(tài)特性。濾波后的信號用于控制 VCO。請注意,VCO 的輸出頻率是提供給頻率基準輸入 (FIN) 的輸入頻率的 N 倍。該輸出信號通過 N 分頻計數(shù)器返回至相位檢測器。
通常,環(huán)路濾波器設(shè)計為與 PLL 應(yīng)用所需的特性匹配。如果 PLL 要采集和跟蹤信號,則環(huán)路濾波器的帶寬將大于固定輸入頻率情況下的預(yù)期帶寬。PLL 接受并鎖定的頻率范圍稱為捕獲范圍。PLL 鎖定并跟蹤信號之后,PLL 所遵循的頻率范圍稱為跟蹤范圍。一般來說,跟蹤范圍大于捕獲范圍。PLL 環(huán)路濾波器還決定了信號頻率能以多快的速度改變,同時仍保持鎖定。這就是最大壓擺率。環(huán)路濾波器帶寬越窄,可實現(xiàn)的相位誤差越小。其代價是響應(yīng)速度變慢,捕獲范圍縮小。時鐘應(yīng)用中使用的 PLL 主要在固定頻率下工作。
零延遲時鐘緩沖器
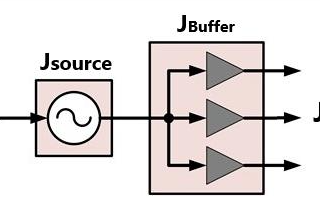
零延遲緩沖器是一種可以緩沖時鐘信號的器件,從單個參考時鐘輸入產(chǎn)生多個時鐘輸出。多個緩沖時鐘輸出相對于參考時鐘輸入的延遲很小或沒有延遲,并且輸出之間的偏移很小。Cypress Semiconductor 的 CY2308SXC-3T 零延遲緩沖器的簡化框圖如圖 3 所示。
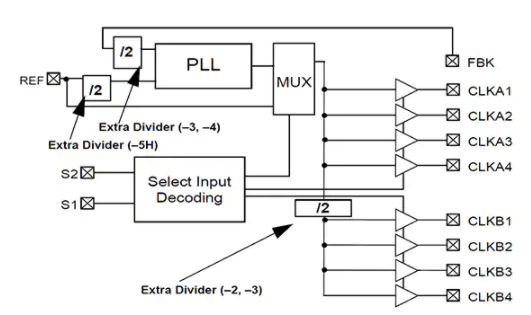
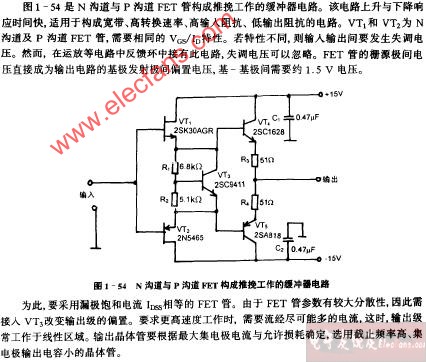
圖 3:CY2308SXC-3T 八輸出零延遲緩沖器使用 PLL 來同步所有輸出,使輸出之間的時間偏移接近零。(圖片來源:Cypress Semiconductor)
零延遲緩沖器采用積分 PLL 構(gòu)建,接受參考輸入 (REF) 和反饋輸入 (FBK) 作為其相位檢測器的輸入。反饋輸入由用戶選擇的輸出之一驅(qū)動。PLL 的內(nèi)部相位檢測器調(diào)節(jié) VCO 的輸出相位,使其兩個輸入沒有相位差或頻率差。其中一個緩沖的時鐘輸出及其負載選擇為反饋信號,通過相位檢測器反饋給 PLL。無論該輸出端的負載如何變化,PLL 都會動態(tài)補償這些輸出負載變化,使得從輸入到驅(qū)動反饋的輸出延遲為零,而不論其輸出負載有多大。
CY2308 系列有兩組四路輸出,工作頻率范圍為 10 至 133 MHz。輸入到輸出時間偏移小于 250 ps,輸出之間的時鐘偏移小于 200 ps。通過改變用于反饋輸入的輸出端負載電容,可以調(diào)整輸入到輸出時間偏移。
該產(chǎn)品系列提供多種二分頻分頻器配置。選擇的器件是帶“-3”的變型,如框圖所示,它有兩個這樣的分頻器。此配置允許用戶獲得兩倍于或四倍于參考時鐘輸入頻率的輸出。
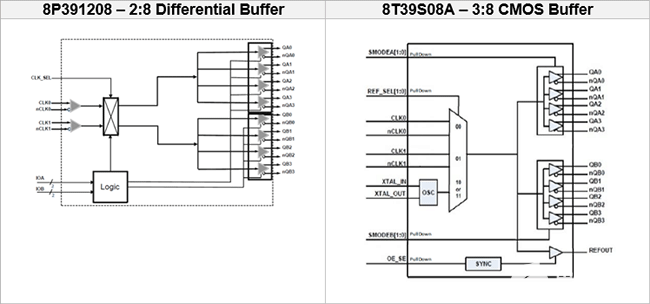
最常用的零延遲緩沖器配置有五個輸出,有多家制造商的產(chǎn)品可供選擇。Cypress Semiconductor 的 CY2305SXI-1HT、IDT 的 2305-1DCGI8 和 ON Semiconductor 的 NB2305AI1HDR2G 是非常類似的器件。它們都有五個緩沖的時鐘輸出、一個 CLKOUT 端口,以及四組時鐘輸出。與 CY2308 不同,PLL 反饋點固定在單個 CLKOUT 信號上。
零延遲緩沖器動態(tài)特性
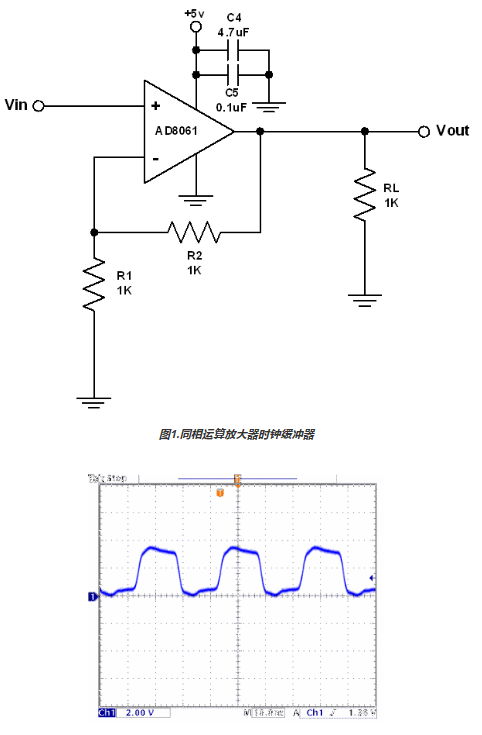
零延遲緩沖器中的 PLL 基本上是反饋控制系統(tǒng)。動態(tài)特性由 PLL 環(huán)路濾波器控制。同任何控制系統(tǒng)一樣,重要的是評估反饋環(huán)路響應(yīng)瞬態(tài)輸入的動態(tài)特性。一種評估方法是,施加一個含階躍變化的輸入來評估階躍響應(yīng)(圖 4)。
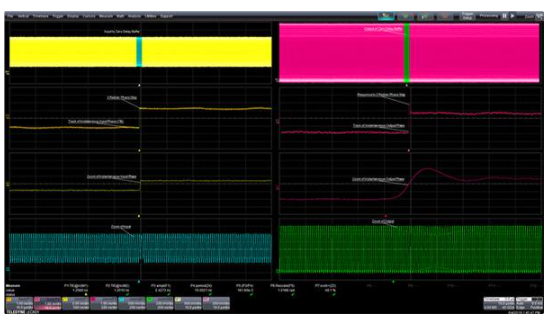
圖 4:在 66.67 MHz 使用 1 弧度相位階躍評估 CY2305 零延遲緩沖器的階躍響應(yīng)。左上方網(wǎng)格為輸入信號,右上方網(wǎng)格為輸出信號。(圖片來源:Digi-Key Electronics)
輸入信號是 66.67 MHz 正弦波,在所采集信號窗口的中心有一個 1 弧度的階躍。此波形由任意波形發(fā)生器 (AWG) 產(chǎn)生。CY2305 零延遲緩沖器的輸入和輸出均使用示波器采集,時基設(shè)置為每格 10 μs。
圖 4 左上方網(wǎng)格為輸入信號,右上方網(wǎng)格為輸出信號。時間間隔誤差 (TIE) 是實測時鐘邊沿與其理想位置的時間差,并且是針對每個波形測量的。實際上,它是以一個固定時鐘速率(本例為 66.67 MHz)為基準的信號的瞬時相位。輸入和輸出的每個時鐘周期的 TIE 值繪制為一個波形,稱為 TIE 軌跡。輸入軌跡是左上方起的第二個網(wǎng)格。這里,相位的階躍是可見的,幅度為 2.4 ns。該值表示 66.67 MHz 時鐘頻率的 1 弧度相移。
右上方起的第二條跡線是輸出的 TIE 軌跡。輸出軌跡顯示了一些過沖,并穩(wěn)定在新的平均值以匹配輸入變化。從上往下數(shù)的第三條跡線顯示了左側(cè)輸入和右側(cè)輸出的水平擴展縮放跡線。輸入階躍的細節(jié)顯示躍變很干凈。
放大輸出可以看出一些過沖,然后在一個大約 500 ns 持續(xù)時間的周期內(nèi)快速穩(wěn)定到新的平均值。對于如此大的相位階躍,這是一種表現(xiàn)良好的階躍響應(yīng)。它迅速穩(wěn)定下來,沒有不穩(wěn)定振蕩響應(yīng)的跡象。
下方兩條跡線是對輸入(左)和輸出(右)的水平擴充展示。在輸入中可以清楚地看到相位階躍很大,但在此時間尺度上,慢速輸出響應(yīng)不是那么顯而易見。
結(jié)語
高性能數(shù)字系統(tǒng)的設(shè)計人員需要不斷地細心關(guān)注時鐘發(fā)生和分配電路的設(shè)計,以避免時鐘分配時序的差異或不確定性。此類問題會降低系統(tǒng)性能,減少時序余裕,或?qū)е鹿δ苠e誤。
如上所述,當(dāng)傳播多個時鐘信號并與主時鐘信號保持同步時,零延遲緩沖器是實現(xiàn)主動控制的好工具。即使檢測到輸出端發(fā)生明顯的負載變化,也能出色地執(zhí)行跟蹤。但是,如本文所述,設(shè)計人員需要仔細評估零延遲緩沖器的反饋環(huán)路動態(tài)特性,以確保其滿足應(yīng)用要求。














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論