1、初始化參數(shù) 在接線(xiàn)之前,先初始化參數(shù)。在控制卡上:選好控制方式;將PID參數(shù)清零;讓控制卡上電時(shí)默認(rèn)使能信號(hào)關(guān)閉;將此狀態(tài)保存,確保控制卡再次上電時(shí)即為此狀態(tài)。 在伺服電機(jī)上:設(shè)置控制方式;設(shè)置
2017-11-22 06:04:00 45936
45936 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2022-08-17 11:01:346057 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2023-05-16 15:56:152478 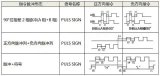
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2023-12-20 18:22:53895 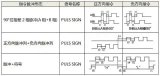
模擬量控制方式在需要使用伺服電機(jī)實(shí)現(xiàn)速度控制的應(yīng)用場(chǎng)景,我們可以選用模擬量來(lái)實(shí)現(xiàn)電機(jī)的速度控制,模擬量的值決定了電機(jī)的運(yùn)行速度。 模擬量有兩種方式可以選擇,電流或電壓。 電壓方式:只需要在控制信號(hào)端加入
2020-09-29 07:57:38
伺服電機(jī)有哪些功能?伺服電機(jī)有哪些調(diào)試步驟?
2021-09-30 07:14:49
速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的。位置控制是通過(guò)發(fā)脈沖來(lái)控制的。具體采用什么控制方式要根據(jù)客戶(hù)的要求,滿(mǎn)足何種運(yùn)動(dòng)功能來(lái)選擇。如果您對(duì)電機(jī)的速度、位置都沒(méi)有要求,只要輸出一個(gè)恒轉(zhuǎn)矩,當(dāng)然是用
2018-10-26 10:51:18
伺服電機(jī)可使控制速度,位置精度很準(zhǔn)確,能夠?qū)㈦妷?b class="flag-6" style="color: red">信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)可應(yīng)用在是火花機(jī)、機(jī)械手、精確的機(jī)器等方面,通常僅僅要是要有動(dòng)力源的,并且對(duì)精度有要求的一般都可能涉及到
2021-06-28 08:22:00
伺服電機(jī)可使控制速度,位置精度很準(zhǔn)確,能夠?qū)㈦妷?b class="flag-6" style="color: red">信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)可應(yīng)用在是火花機(jī)、機(jī)械手、精確的機(jī)器等方面,通常僅僅要是要有動(dòng)力源的,并且對(duì)精度有要求的一般都可能涉及到
2021-06-28 06:08:42
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶(hù)的要求以及滿(mǎn)足何種運(yùn)動(dòng)功能來(lái)選擇。接下來(lái),給大家介紹伺服電機(jī)的三種控制方式。如果您對(duì)電機(jī)的速度
2018-11-02 09:40:43
線(xiàn)。以下的線(xiàn)是必須要接的:控制卡的模擬量輸出線(xiàn)、使能信號(hào)線(xiàn)、伺服輸出的編碼器信號(hào)線(xiàn)。復(fù)查接線(xiàn)沒(méi)有錯(cuò)誤后,伺服電機(jī)和控制卡(以及PC)上電。此時(shí)電機(jī)應(yīng)該不動(dòng),而且可以用外力輕松轉(zhuǎn)動(dòng),如果不是這樣,檢查使能
2020-12-10 16:24:37
),訂貨號(hào)為6ES7 288-3AE08-0AA0,分別如下圖所示:圖1 西門(mén)子S7200-SMART的CPU ST60圖2 擴(kuò)展的數(shù)字量模塊圖3 擴(kuò)展的模擬量模塊其中CPU 共計(jì)輸入點(diǎn)36個(gè),輸出點(diǎn)24
2019-12-27 15:21:10
大神們,求幫給點(diǎn)意見(jiàn)和思路。要求模擬量溫度傳感器,運(yùn)放和濾波電路,ADC采集,然后51控制,輸出顯示等
2014-06-19 09:57:54
各位高手,大家好:我剛開(kāi)始學(xué)畫(huà)原理圖,哪位有電流4-20mA模擬量輸入的原理圖例子,發(fā)給我看看吧,謝謝。
2015-04-28 15:55:40
伺服電機(jī)有何功能?調(diào)試伺服電機(jī)的步驟有哪些?
2021-09-30 08:58:20
請(qǐng)問(wèn)哪位高手使用過(guò)Arduino 自帶的a/d轉(zhuǎn)換器。目前遇到的問(wèn)題是模擬量轉(zhuǎn)換結(jié)果不停跳變,在模擬量保持為恒定值的情況下,求幫忙解答,急用,謝啦!
2019-11-07 17:29:30
想用鴻蒙開(kāi)發(fā)板做工業(yè)實(shí)時(shí)控制,輸入輸出信號(hào)均是模擬量。看官方開(kāi)發(fā)板是針對(duì)智能家居。想問(wèn)一下官方開(kāi)發(fā)板或者第三方開(kāi)發(fā)板有集成AD/DA芯片或者支持模擬量采集和輸出功能嗎?如果支持,AD/DA芯片的維數(shù)和速度是多少呢?
2020-09-17 16:19:51
傳感器等各種模擬量信號(hào),來(lái)采集或檢測(cè)8路模擬量信號(hào);還可輸出8路模擬量信號(hào)用于控制比例閥、變頻器、直流電機(jī)、激光器等外部器件;支持通過(guò)RS232串口進(jìn)行功能擴(kuò)展,最大可擴(kuò)5個(gè)擴(kuò)展板,功能有I/O、A/D
2011-03-08 15:30:02
傳感器等各種模擬量信號(hào),來(lái)采集或檢測(cè)8路模擬量信號(hào);還可輸出8路模擬量信號(hào)用于控制比例閥、變頻器、直流電機(jī)、激光器等外部器件;支持通過(guò)RS232串口進(jìn)行功能擴(kuò)展,最大可擴(kuò)5個(gè)擴(kuò)展板,功能有I/O、A/D
2011-03-09 11:25:06
現(xiàn)在有NI9263模擬量輸出卡,想用這個(gè)卡去控制步進(jìn)電機(jī)的轉(zhuǎn)速,不知道能不能實(shí)現(xiàn),怎么實(shí)現(xiàn)?因?yàn)椴竭M(jìn)電機(jī)需要脈沖信號(hào)來(lái)控制,現(xiàn)在手里只有模擬量輸出的卡,不知道怎么把這個(gè)模擬量轉(zhuǎn)成脈沖信號(hào),轉(zhuǎn)了之后能不能控制步進(jìn)電機(jī)?
2019-07-25 10:20:13
今天為大家講解的是關(guān)于PLC控制伺服電機(jī)三種方式: 一、轉(zhuǎn)矩控制 二、位置控制 三、速度模式 1、轉(zhuǎn)矩控制 轉(zhuǎn)矩控制方式是通過(guò)外部模擬量的輸入或直接的地址的賦值來(lái)設(shè)定電機(jī)軸對(duì)外的輸出轉(zhuǎn)矩的大小
2019-10-27 08:00:00
PLC對(duì)模擬量信號(hào)的處理過(guò)程及方法。
2021-03-11 06:44:54
通過(guò)計(jì)算轉(zhuǎn)換,將這些模擬量信號(hào)轉(zhuǎn)換為內(nèi)部的數(shù)值信號(hào)。從而實(shí)現(xiàn)系統(tǒng)的監(jiān)控及控制。從現(xiàn)場(chǎng)的物理信號(hào)到PLC內(nèi)部處理的數(shù)值信號(hào),有以下幾個(gè)步驟:從以上PLC模擬量的信號(hào)輸入流程可以看到,在自動(dòng)化過(guò)程控制
2020-09-05 08:31:39
本身不帶有模擬量輸入,此時(shí)我們可以用單片機(jī)制作一個(gè)建議的模擬量脈沖調(diào)速裝置——通過(guò)單片機(jī)來(lái)接收模擬量信號(hào),然后根據(jù)模擬量的不同來(lái)調(diào)節(jié)輸出脈沖的頻率,以此來(lái)實(shí)現(xiàn)對(duì)伺服電機(jī)的模擬量調(diào)速控制。要實(shí)現(xiàn)上述
2021-06-28 09:07:34
對(duì)于超出ADC量程的模擬量應(yīng)該如何處理
2023-10-15 12:43:46
回收歐姆龍CP1H,回收歐姆龍CP1L,回收歐姆龍CP1E系列PLC,回收歐姆龍模塊高價(jià)回收西門(mén)子模塊、回收西門(mén)子模塊、回收歐姆龍模塊、高價(jià)回收全新模塊、求購(gòu)西門(mén)子模塊、觸摸屏、伺服電機(jī)、模擬量模塊,電話(huà)聯(lián)系***(微信同號(hào))
2021-07-01 09:07:28
請(qǐng)問(wèn),我需要使用fpga檢測(cè)脈沖模擬量輸入(大約1kHz吧),檢測(cè)到每一個(gè)脈沖后都要延時(shí)一定時(shí)間,最后輸出一個(gè)ttl信號(hào)。這功能通過(guò)ad模塊能實(shí)現(xiàn)么?ad是檢測(cè)的具體模擬量的大小,只檢測(cè)有或無(wú)這樣子有什么方便的方案么?以前沒(méi)接觸過(guò)電這塊,頭很痛啊
2016-12-15 10:07:53
我有一個(gè)NI的模擬量模塊N9217是PT100的模塊,現(xiàn)在接上了傳感器,請(qǐng)問(wèn)如何在FPGA程序中做工程量的標(biāo)定,讓它直接顯示實(shí)時(shí)的溫度,請(qǐng)問(wèn)有標(biāo)準(zhǔn)的函數(shù)嗎?還是說(shuō)要自己編寫(xiě)程序?有例程參考下嗎?附件圖片是我自己的例子但沒(méi)有工作
2018-12-05 17:28:28
labview 做模擬量輸出AO,能否輸出一個(gè)隨機(jī)信號(hào)(文件格式SIF)?隨機(jī)信號(hào)不是正弦波或常數(shù),而是隨時(shí)間變化的一個(gè)電壓波形,求各位大神指點(diǎn),謝謝。
2019-07-22 10:58:49
在平時(shí)使用PLC調(diào)試傳感器過(guò)程中經(jīng)常會(huì)遇到傳感器輸出信號(hào)為模擬量信號(hào),而PLC能處理的是數(shù)字信號(hào),這時(shí)候就需要使用PLC的擴(kuò)展模塊FX2N-4AD,該模塊可以將模擬量輸入轉(zhuǎn)換成數(shù)字量輸出到PLC中,達(dá)到PLC對(duì)傳感器信號(hào)的采集和處理。...
2021-07-02 07:36:41
大家好,這是一個(gè)模擬量采集電路,請(qǐng)問(wèn)圖中C1和C2的作用是什么?該怎么選取C1和C2的值
2015-09-17 11:53:16
現(xiàn)在用ESCON 70/10伺服控制器控制無(wú)刷電子換向電機(jī),有兩個(gè)問(wèn)題,1,伺服控制器里J6接口有兩個(gè)模擬量輸入,此兩者有何區(qū)別。2、會(huì)向驅(qū)動(dòng)器輸入使能信號(hào),使能信號(hào)應(yīng)該屬于開(kāi)關(guān)量,接到驅(qū)動(dòng)器里應(yīng)該接在數(shù)字輸入端,還是模擬量輸入端?謝謝!
2015-07-20 14:52:52
大家好,我想用單片機(jī)采集8路模擬量,控制4個(gè)繼電器,下位單片機(jī)實(shí)現(xiàn)自動(dòng)控制,然后把采集到的8路模擬量利用GPRS模塊傳輸?shù)竭h(yuǎn)程服務(wù)器。在淘寶上選了3個(gè)模塊,因?yàn)榧?jí)別不夠不能發(fā)鏈接,我就傳了個(gè)文件,幫忙看看能不能實(shí)現(xiàn)。誰(shuí)有好的建議還請(qǐng)不吝賜教,謝謝各位,打擾各位!
2013-04-19 12:55:02
開(kāi)關(guān)量輸出模塊,回收模擬量輸入模塊,回收模擬量輸出模塊,回收發(fā)那科伺服電機(jī),回收三菱PLC模塊,回收工控西門(mén)子plc模塊,輸入模塊,輸出模塊,回收CPU標(biāo)準(zhǔn)型模塊,回收西門(mén)子CPU輸入輸出模塊,計(jì)算器模塊,常年高價(jià)回收機(jī)床數(shù)控西門(mén)子品牌觸摸屏,人機(jī)界面,精智面板,6AV6系列觸摸屏,微信***
2021-11-22 14:40:32
`回收模塊PLC、觸摸屏、伺服電機(jī)、模擬量輸入、輸出模塊、cpu中央處理器、 長(zhǎng)期回收回收西門(mén)子S7-300、400、1200、1500、6GK、6DD、6SL、6FC、6SN、6SE、6
2020-11-18 20:14:25
基于mcp3221多路模擬量采集系統(tǒng)能不能實(shí)現(xiàn),實(shí)現(xiàn)時(shí)設(shè)計(jì)思路是咋樣的,采集的模擬量可以用分壓電路產(chǎn)生嗎
2019-05-23 21:14:28
外界對(duì)模擬量傳感器傳輸信號(hào)存在哪些干擾
2021-03-17 06:53:58
的轉(zhuǎn)速,出廠(chǎng)值為500,如果你只準(zhǔn)備讓電機(jī)在1000轉(zhuǎn)以下工作,那么,將這個(gè)參數(shù)設(shè)置為111。2、接線(xiàn)將控制卡斷電,連接控制卡與伺服之間的信號(hào)線(xiàn)。以下的線(xiàn)是必須要接的:控制卡的模擬量輸出線(xiàn)、使能信號(hào)
2015-12-29 11:12:23
labview利用混合信號(hào)圖做模擬量和開(kāi)關(guān)量顯示我試了好多次,數(shù)字信號(hào)形式通道信號(hào)不知道怎么混合,求大神幫幫我,最好給個(gè)案例,謝謝了
2019-07-09 17:18:27
伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2021-01-21 07:38:46
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2021-01-22 07:46:05
`山東地區(qū)求購(gòu)西門(mén)子模塊、觸摸屏、伺服電機(jī)、模擬量輸入,CPU中央處理器,高價(jià)收購(gòu)西門(mén)子6AV 6DD 6GK 西門(mén)子一系列型號(hào)、求購(gòu)西門(mén)子模塊、觸摸屏、伺服電機(jī)、模擬量輸入、輸出模塊、cpu
2020-11-17 10:01:44
我現(xiàn)在設(shè)計(jì)的圖是這樣的,當(dāng)是電流模擬量輸入是165歐電阻進(jìn)行IV轉(zhuǎn)換然后進(jìn)電壓跟隨器后進(jìn)MCU的ADC采集;當(dāng)是電壓的時(shí)候直接進(jìn)電壓跟隨器。現(xiàn)在Multism仿真和用普通的模擬量傳感器(電壓電流都有
2022-01-05 13:18:00
伺服電機(jī)一般都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式 。 速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的。位置控制是通過(guò)發(fā)脈沖來(lái)控制的。具體采用什么控制方式要根據(jù)客戶(hù)的要求,滿(mǎn)足何種運(yùn)動(dòng)
2018-10-26 10:57:29
樹(shù)莓派用AD7793怎么進(jìn)行模擬量輸入的擴(kuò)展
2017-08-02 15:28:29
求大佬分享模擬量濾波程序
2021-12-15 07:19:09
回收西門(mén)子模塊PLC、哪里回收西門(mén)子模塊、回收西門(mén)子模塊、回收西門(mén)子觸摸屏長(zhǎng)期高價(jià)收購(gòu)西門(mén)子6ES7200\\\300\\\\400\西門(mén)子一系列模塊高價(jià)收購(gòu)西門(mén)子6AV 6DD 6GK 西門(mén)子一系列型號(hào)、求購(gòu)模塊PLC、觸摸屏、伺服電機(jī)、模擬量輸入、輸出模塊、cpu中央處理器,,微信***
2021-05-28 08:06:18
求購(gòu)模塊PLC、觸摸屏、伺服電機(jī)、模擬量輸入、輸出模塊、cpu中央處理器、長(zhǎng)期大量收購(gòu)西門(mén)子:S7-200 , S7-300 , S7-400系列 PLC 模塊 CPU 觸摸屏6A|V系列ET200
2021-02-28 12:04:53
求購(gòu)西門(mén)子模塊、觸摸屏、伺服電機(jī)、模擬量輸入、輸出模塊、cpu中央處理器、長(zhǎng)期大量收購(gòu)西門(mén)子6ES7 321-1BL00-0AA0、6ES7 322-1BL00-0AA0、6
2021-06-30 20:30:37
電壓對(duì)應(yīng)的轉(zhuǎn)速,出廠(chǎng)值為500,如果你只準(zhǔn)備讓電機(jī)在1000轉(zhuǎn)以下工作,那么,將這個(gè)參數(shù)設(shè)置為111。2、接線(xiàn)將控制卡斷電,連接控制卡與伺服之間的信號(hào)線(xiàn)。以下的線(xiàn)是必須要接的:控制卡的模擬量輸出線(xiàn)、使
2018-10-31 11:06:33
請(qǐng)問(wèn)一下伺服電機(jī)的調(diào)試步驟有哪些?
2021-10-12 06:13:24
步進(jìn)電機(jī)+驅(qū)動(dòng)器工作的時(shí)候影響我線(xiàn)路板上的溫度傳感器的模擬量輸出該怎么辦
2019-04-02 04:27:21
跪求51單片機(jī)實(shí)現(xiàn)模擬量輸入/輸出控制的例子
2015-11-01 16:37:45
運(yùn)動(dòng)控制器控制伺服電機(jī)的指令方式運(yùn)動(dòng)控制器以模擬量信號(hào)控制伺服電機(jī)的調(diào)試步驟
2021-01-21 07:15:51
,12個(gè)電機(jī)數(shù)據(jù)通過(guò)1張采集卡采集,1個(gè)天平數(shù)據(jù)通過(guò)1張采集卡采集。項(xiàng)目需求1、軟件通過(guò)控制模擬量采集卡完成對(duì)電機(jī)運(yùn)行數(shù)據(jù)的采集,12 個(gè)電機(jī)數(shù)據(jù)通過(guò)1張NI9205采集卡采集,1 個(gè)天平數(shù)據(jù)通過(guò)1張NI9220采集卡采集:2、軟件通過(guò)控制NI9263模擬量輸出卡實(shí)現(xiàn)相機(jī)同...
2021-09-03 07:43:53
/ 1794-系列,PLC,模塊,CPU,控制器,觸摸屏等重慶求購(gòu)模塊PLC、觸摸屏、伺服電機(jī)、模擬量輸入模塊微信*** QQ2651064022`
2020-08-18 10:13:38
,回收西門(mén)子模擬量輸入模塊,回收模擬量輸出模塊,回收模擬量輸入輸出模塊回收回收西門(mén)子模塊回收全新CPU模塊觸摸屏、專(zhuān)業(yè)回???收西門(mén)子plc模塊、回收西門(mén)子觸摸屏、求購(gòu)西門(mén)子模塊、觸摸屏、伺服電機(jī)
2021-05-03 22:26:59
HY5700-16mA(Z)電流模擬量光纖轉(zhuǎn)換器是一款16通道電流模擬量光纖轉(zhuǎn)換設(shè)備。采用ARM芯片方案,穩(wěn)定可靠低耗電。同時(shí)支持單向1~16路通道或雙向1~8通道的電流模擬量在光纖上透明傳輸,無(wú)需
2022-06-13 23:07:32
基本說(shuō)明:FAD-3160是一款將6路模擬量輸入信號(hào)(AI)連接到Modbus TCP網(wǎng)絡(luò)的模塊。
2023-02-28 10:42:31
基本說(shuō)明:FAD-1160是一款將6路模擬量輸入信號(hào)(AI)連接到PROFIBUS DP網(wǎng)絡(luò)的模塊。
2023-04-06 15:25:29
伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)可應(yīng)用在是火花機(jī)、機(jī)械手、精確的機(jī)器等方面,通常只要是要有動(dòng)力源的,而且對(duì)精度有要求的一般都可能涉及到伺服電機(jī)。
2017-03-01 13:46:1133492 伺服電機(jī)(servo motor )是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服
2017-12-15 15:06:4410899 模擬信號(hào) 這種方式下,運(yùn)動(dòng)控制系統(tǒng)給伺服驅(qū)動(dòng)器發(fā)送+/-10V的模擬電壓指令,同時(shí)接收來(lái)自電機(jī)編碼器或直線(xiàn)光柵等位置檢測(cè)元件的位置反饋信號(hào);伺服驅(qū)動(dòng)器工作在速度控制模式,位置閉環(huán)由運(yùn)動(dòng)控制器完成。歐美的伺服產(chǎn)品大多采用這種工作模式。其優(yōu)點(diǎn)是伺服響應(yīng)快,但缺點(diǎn)是對(duì)現(xiàn)場(chǎng)干擾較敏感,調(diào)試稍復(fù)雜。
2018-04-25 15:52:2715660 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶(hù)的要
2018-07-24 11:19:483808 這種方式與步進(jìn)電機(jī)的控制方式類(lèi)似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類(lèi)型的脈沖指令信號(hào);伺服驅(qū)動(dòng)器工作在位置控制模式,位置閉環(huán)由伺服驅(qū)動(dòng)器完成。日系伺服和國(guó)產(chǎn)伺服產(chǎn)品大都采用這種模式。其優(yōu)點(diǎn)是系統(tǒng)調(diào)試簡(jiǎn)單,不易產(chǎn)生干擾,但缺點(diǎn)是伺服系統(tǒng)響應(yīng)稍慢。
2019-02-17 11:16:2710987 技術(shù)需知伺服電機(jī)調(diào)試的基本步驟, 運(yùn)動(dòng)控制器控制伺服電機(jī)通常采用兩種指令方式: 1、數(shù)字脈沖 這種方式與步進(jìn)電機(jī)的控制方式類(lèi)似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送脈沖/方向或CW/CCW類(lèi)型的脈沖指令信號(hào)
2020-06-12 14:45:485452 PLC讀取模擬量信號(hào)必須要有模擬量輸入模塊,即常說(shuō)的AI模塊。
2019-11-12 16:21:2211413 選用伺服電機(jī)規(guī)格時(shí),依下列步驟進(jìn)行。
2020-09-11 13:58:344778 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2021-01-20 10:34:52 20
20 運(yùn)動(dòng)控制器控制伺服電機(jī)通常采用兩種指令方式:1、數(shù)字脈沖 這種方式與步進(jìn)電機(jī)的控制方式類(lèi)似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類(lèi)型的脈沖指令信號(hào);
2021-01-29 08:57:3814 伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2021-02-03 06:46:1237 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶(hù)的要求以及滿(mǎn)足何種運(yùn)動(dòng)功能來(lái)選擇。
2021-04-04 06:08:5826 系統(tǒng),給伺服控制機(jī)推送不同的單脈沖版完成不同速權(quán)部位的控制。通常采用單脈沖和模擬量輸入控制,有速率PID,轉(zhuǎn)距PID,伺服還具有意見(jiàn)反饋,將對(duì)意見(jiàn)反饋數(shù)據(jù)和輸出數(shù)據(jù)信號(hào)進(jìn)行處理,非常好的閉換控制。 閉環(huán)控制系統(tǒng)軟件,又稱(chēng)意
2021-07-11 15:22:496624 在伺服電機(jī)上:設(shè)置控制方式;設(shè)置使能由外部控制;編碼器信號(hào)輸出的齒輪比;設(shè)置控制信號(hào)與電機(jī)轉(zhuǎn)速的比例關(guān)系。一般來(lái)說(shuō),建議使伺服工作中的最大設(shè)計(jì)轉(zhuǎn)速對(duì)應(yīng)9V的控制電壓。
2023-01-03 12:51:101788 將控制卡斷電,連接控制卡與伺服之間的信號(hào)線(xiàn)。以下的線(xiàn)是必須要接的:控制卡的模擬量輸出線(xiàn)、使能信號(hào)線(xiàn)、伺服輸出的編碼器信號(hào)線(xiàn)。復(fù)查接線(xiàn)沒(méi)有錯(cuò)誤后,電機(jī)和控制卡(以及PC)上電。
2023-01-16 14:06:121803 伺服電機(jī)的使能信號(hào)是控制伺服電機(jī)運(yùn)動(dòng)的重要信號(hào)之一,通過(guò)使能信號(hào)的控制,可以實(shí)現(xiàn)對(duì)伺服電機(jī)的啟動(dòng)和停止。同時(shí),通過(guò)對(duì)使能信號(hào)的設(shè)置和調(diào)試,還可以實(shí)現(xiàn)對(duì)伺服電機(jī)的運(yùn)動(dòng)速度、加速度等參數(shù)的控制,提高
2023-03-03 11:20:4011209 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶(hù)的要求以及滿(mǎn)足何種運(yùn)動(dòng)功能來(lái)選擇。
2023-03-07 10:19:53601 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶(hù)的要求以及滿(mǎn)足何種運(yùn)動(dòng)功能來(lái)選擇。
2023-03-17 09:47:13448 控制器控制伺服電機(jī)通常采用兩種指令方式:數(shù)字脈沖和模擬信號(hào)。數(shù)字脈沖這種方式與步進(jìn)電機(jī)的控制方式類(lèi)似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類(lèi)型的脈沖指令信號(hào);伺服驅(qū)動(dòng)器工作在位
2023-05-09 14:43:031011 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。
2023-05-24 09:44:00636 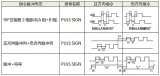
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?一、伺服電機(jī)脈沖控制方式在一些小型單機(jī)設(shè)備,選用脈沖控制實(shí)現(xiàn)電機(jī)的定位,應(yīng)該是常見(jiàn)的應(yīng)用方式,這種
2022-03-14 14:33:482401 
伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2023-07-26 09:22:20980 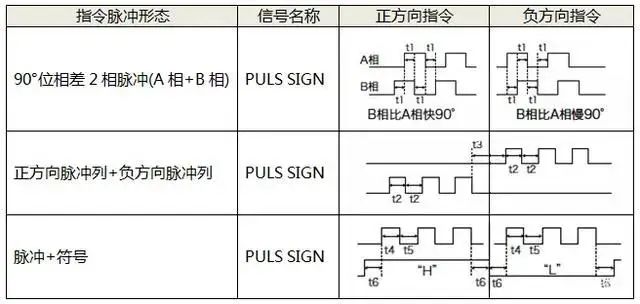
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶(hù)的要求以及滿(mǎn)足何種運(yùn)動(dòng)功能來(lái)選擇。
2023-07-28 14:36:19574 
信號(hào)輸入,通過(guò)該隔離變送器進(jìn)行信號(hào)變換采集,以標(biāo)準(zhǔn)模擬量信號(hào)的形式或者用戶(hù)指定的特殊的模擬量信號(hào)傳輸?shù)?b class="flag-6" style="color: red">控制室、PLC、PC及DCS系統(tǒng)。產(chǎn)品的輸入、輸出、工作電源間
2023-09-02 02:31:430 一進(jìn)二出模擬量信號(hào)隔離變送器4-20mA一進(jìn)二出模擬量信號(hào)隔離變送器一進(jìn)二出模擬量信號(hào)隔離變送器深圳捷晟達(dá)(JSD科技)的JSD TA-1002一進(jìn)二出模擬量信號(hào)隔離變送器,是將輸入與輸出之間電氣
2023-09-02 02:55:260 模擬量信號(hào)輸入,通過(guò)模擬量信號(hào)隔離變送器進(jìn)行信號(hào)變換調(diào)理,以標(biāo)準(zhǔn)模擬量信號(hào)的形式或者用戶(hù)指定的特殊的模擬量信號(hào)傳輸?shù)?b class="flag-6" style="color: red">控制室、PLC及DCS系統(tǒng)。本產(chǎn)品的輸入、輸出
2023-09-02 02:57:390 模擬量信號(hào)隔離變送器進(jìn)行信號(hào)變換調(diào)理,以標(biāo)準(zhǔn)模擬量信號(hào)的形式或者用戶(hù)指定的特殊的模擬量信號(hào)傳輸?shù)?b class="flag-6" style="color: red">控制室、PLC及DCS系統(tǒng)。本產(chǎn)品的輸入、輸出、工作電源間相互隔離,
2023-09-02 02:59:220 儀表的各種模擬量信號(hào)輸入,通過(guò)模擬量信號(hào)隔離變送器進(jìn)行信號(hào)變換調(diào)理,以標(biāo)準(zhǔn)模擬量信號(hào)的形式或者用戶(hù)指定的特殊的模擬量信號(hào)傳輸?shù)?b class="flag-6" style="color: red">控制室、PLC及DCS系統(tǒng)。本產(chǎn)品的
2023-09-02 03:04:001 隔離變送器進(jìn)行信號(hào)變換調(diào)理,以標(biāo)準(zhǔn)模擬量信號(hào)的形式或者用戶(hù)指定的特殊的模擬量信號(hào)傳輸?shù)?b class="flag-6" style="color: red">控制室、PLC、PC及DCS系統(tǒng)。本產(chǎn)品的輸入、輸出、工作電源間相互隔離,采
2023-09-16 01:23:260 伺服電機(jī)選型是在設(shè)計(jì)或選擇機(jī)械設(shè)備時(shí),根據(jù)工作需求和性能參數(shù)來(lái)確定適合的伺服電機(jī)。伺服電機(jī)是一種特殊類(lèi)型的電機(jī),具有高精度控制和反饋系統(tǒng),廣泛應(yīng)用于機(jī)械、自動(dòng)化和機(jī)器人領(lǐng)域。 伺服電機(jī)選型計(jì)算
2023-12-01 16:20:16571 伺服電機(jī)的選型和調(diào)試是實(shí)現(xiàn)精準(zhǔn)控制和提高工業(yè)自動(dòng)化效率的關(guān)鍵步驟。正確的選型和調(diào)試可以顯著提升機(jī)械系統(tǒng)的性能,減少維護(hù)成本,延長(zhǎng)設(shè)備使用壽命。以下是伺服電機(jī)調(diào)試和選型的詳盡步驟。
2023-12-25 14:34:23275 ,通常用于控制和調(diào)節(jié)外部設(shè)備的運(yùn)行狀態(tài)。下面將詳細(xì)介紹PLC模擬量輸出的接線(xiàn)方法、信號(hào)類(lèi)型、輸出范圍以及其在實(shí)際應(yīng)用中的應(yīng)用。 接線(xiàn)方法: PLC模擬量輸出需要通過(guò)模擬量輸出模塊連接到外部設(shè)備。通常情況下,PLC模擬量輸出模塊的外部接口包括模擬量輸出
2024-02-05 14:46:28515
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論