無刷主流電機的驅(qū)動控制方式主要分為有位置傳感器和無位置傳感器的控制方式兩種。由于在四軸飛行器中的要求無刷直流電機控制器要求體積小、重量輕、高效可靠,因而采用無位置傳感器的無刷直流電機
2015-01-12 13:54:28 9335
9335 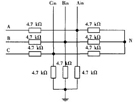
直流電機驅(qū)動電路介紹
2022-07-25 18:22:0212542 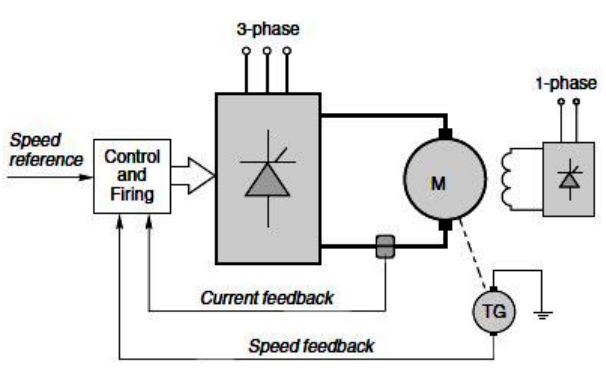
在直流電機中,有有刷直流電機和無刷直流電機之分,它們之間各有各的優(yōu)點,有刷直流電機優(yōu)點在于價格便宜、控制方便但轉(zhuǎn)速和壽命無法做得很高,無刷直流電機可以,但是成本高且控制較為復雜。
2022-11-07 11:50:384795 端連冷地(變壓器次級),三極管端連熱地。供電采用兩個獨立電源,一個直流電源連在dvcc和熱地上,另一個連在vcc和冷地上, 這樣雖然在3525和ir2110的控制口上有幾百伏的電位, 但是沒有高電壓
2019-04-18 08:10:38
的轉(zhuǎn)速,能夠很方便的實現(xiàn)電機的智能控制。其間是通過AT89C52單片機產(chǎn)生脈寬可調(diào)的脈沖信號并輸入到L298驅(qū)動芯片來控制直流電機工作的。該直流電機PWM控制系統(tǒng)由以下電路模塊組成:設(shè)計輸入部分:這一
2019-08-06 15:42:06
IR2110做MOS管驅(qū)動,低端正常,高端一直高電平是什么原因?
2017-03-25 19:06:03
用IR2110驅(qū)動全橋逆變電路發(fā)現(xiàn),IR2110發(fā)熱,MOSFET管也發(fā)熱,請問是什么原因啊?
2015-06-05 18:45:09
我用兩片ir2110做了一個全橋電路,邏輯電源12V,驅(qū)動電源12V。當我通電,輸入邏輯信號但不接負載時(空載)。直流穩(wěn)壓電源顯示0.13A的電流,ir2110工作溫度35℃。
2016-02-21 14:47:44
求一個,根據(jù)直流電機電流的大小控制電機正反轉(zhuǎn),也就是說,當直流電機正轉(zhuǎn)時堵轉(zhuǎn)了,電路就給電機斷電,但是電機還可以反轉(zhuǎn);同理反轉(zhuǎn)也是這樣的
2019-08-16 13:24:41
控制直流電機的正轉(zhuǎn)反轉(zhuǎn)和PWM調(diào)速直流電機驅(qū)動,單片機與L298之間如何用光耦隔離?
2012-12-06 15:54:01
采用dsp2812怎么實現(xiàn)直流電機調(diào)速控制,求大神指點,小弟在此感激不盡。
2018-01-06 23:52:51
直流電機的旋轉(zhuǎn)原理是什么?直流電機的控制原理是什么?直流無刷電機的旋轉(zhuǎn)原理是什么?直流無刷電機的控制原理是什么?
2021-09-24 11:26:17
采用DSP怎么實現(xiàn)直流電機調(diào)速控制呢,以及采用何種編程語言,求大神
2018-01-05 23:59:33
直流電機的基本構(gòu)成直流電機的組成結(jié)構(gòu)直流電機驅(qū)動電路
2021-01-26 06:31:39
直流電機驅(qū)動芯片IR8200B相關(guān)資料下載
2021-05-17 07:25:17
什么是直流電機?L298N驅(qū)動板是怎樣控制直流電機的?
2021-10-19 08:29:57
STM32怎么實現(xiàn)對直流電機的勻速控制
2023-10-09 09:02:31
`stm32控制IR2110S驅(qū)動BLDC無刷直流電機,陸續(xù)分享技術(shù)細節(jié)原理圖pcb實物`
2019-08-21 18:05:29
一般我們需要控制的電機有:有刷直流電機,直流減速電機、三相無刷直流電機、感應(yīng)電機、永磁同步電機、開關(guān)磁阻電機。1.PWM逆變電路驅(qū)動 大型電機控制中一般都需要6路PWM波,這里使用該機定時器TIM1
2016-07-04 11:40:32
本文介紹如何使用STM32F103單片機,通過官方固件庫,設(shè)置高級定時器TIM1輸出嵌入死區(qū)的互補PWM,來驅(qū)動直流電機的程序設(shè)計與電路設(shè)計。硬件電路采用IR2110S芯片作為mos管的驅(qū)動,驅(qū)動
2021-06-29 06:49:37
我需要用IR2110驅(qū)動全橋,我從一個震蕩電路上輸出方波給IR2110去驅(qū)動同側(cè)橋臂上的2個MOSFET,請問我是不是需要先讓方波變成2個互補的方波再輸入IR2110?如果需要,要如何實現(xiàn)生成一個互補的方波?IR2110有沒有這樣功能讓高側(cè)輸出和低側(cè)輸出互補?
2016-03-15 07:33:02
各位大神,剛開始使用ir2110做有H橋驅(qū)動直流電機,請問在驅(qū)動過程中ir2110是怎樣充電的
2019-09-25 02:50:29
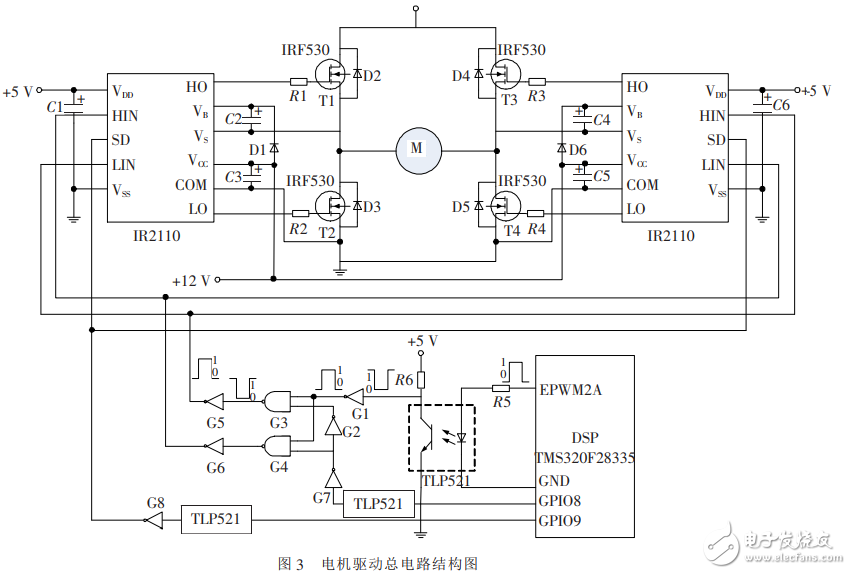
直流電機。 無刷直流電機驅(qū)動控制系統(tǒng)包括驅(qū)動電路和系統(tǒng)程序控制兩部分。采用功率管的開關(guān)特性構(gòu)成三相全橋驅(qū)動電路,之后使用DSP作為主控芯片,借助其強大的運算處理能力,實現(xiàn)電機的啟動與控制,但電路結(jié)構(gòu)復雜
2018-10-08 15:13:09
這個是國外的開源的DIY項目。[size=16.0016px]H-Bridge是圍繞國際整流器的IR2104 IC設(shè)計的,該板主要用于直流電機應(yīng)用,驅(qū)動器可以處理高達8-10安培的負載,我已經(jīng)用
2018-10-22 13:38:04
,直流電機具有調(diào)速性能優(yōu)異,啟動迅速,啟動轉(zhuǎn)矩大,帶負載能力強的特點。因此在工業(yè)自動化領(lǐng)域中得到了廣泛的應(yīng)用。 目前,直流電機驅(qū)動電路通常是采用DSP通過一個H橋電路發(fā)送PWM控制脈沖,控制直流電機以
2018-09-27 15:06:25
如何使用Arduino控制直流電機?
2021-10-19 07:38:00
IR2110是什么?IR2110的內(nèi)部結(jié)構(gòu)是有哪些部分組成的?如何使用STM32F103單片機來驅(qū)動直流電機的程序設(shè)計與電路設(shè)計?
2021-07-29 09:18:30
附錄2直流電機PWM調(diào)速系統(tǒng)中控制電壓非線性研究引言 由于線性放大驅(qū)動方式效率和散熱問題嚴重,目前絕大多數(shù)直流電動機采用開關(guān)驅(qū)動方式。開關(guān)驅(qū)動方式是半導體功率器件工作在開關(guān)狀態(tài),通過脈寬調(diào)制PWM
2021-07-14 06:12:00
查找了好多文獻,發(fā)現(xiàn)都是對無刷直流電機進行轉(zhuǎn)矩控制,我現(xiàn)在想要對有刷直流電機進行轉(zhuǎn)矩控制,比如根據(jù)不同負載的大小輸出不同大小的轉(zhuǎn)矩,可以實現(xiàn)嗎?應(yīng)該怎樣解決?對轉(zhuǎn)矩進行控制與有刷和無刷有關(guān)嗎?跪求看到帖子的大神解救我這個小白!!!
2019-08-06 12:19:36
直流無刷電機的工作原理是什么?電機霍爾傳感器工作原理是什么?怎么實現(xiàn)無刷直流電機驅(qū)動電路的設(shè)計?
2021-10-09 07:04:15
無刷直流電機(BLDC)具有哪些特點?無刷直流電機是如何進行工作的?無刷直流電機的驅(qū)動方法有哪些?
2021-08-11 07:48:12
有刷直流電機和無刷直流電機的驅(qū)動器有區(qū)別嗎?
2015-09-02 10:32:20
繼電器如何控制直流電機,實現(xiàn)按鍵控制直流電機功能?
2021-10-18 07:50:53
什么是直流電機?L298N雙H橋直流電機驅(qū)動模塊的引腳有哪些功能?樹莓派如何控制直流電機?
2021-08-30 06:00:04
主電路圖如圖一,驅(qū)動電路如圖二(用TL494產(chǎn)生推挽信號,分別輸入給兩個IR2110單元),加了直流電源后的驅(qū)動波形如圖三,去掉直流電源后的驅(qū)動波形如圖四。現(xiàn)在主要問題是加上20V直流電源后,兩個
2019-12-05 15:00:31
摘要:IR2110是IR公司的橋式驅(qū)動集成電路芯片,它采用高度集成的電平轉(zhuǎn)換技術(shù),大大簡化了邏輯電路對功率器件的控制要求,同時提高了驅(qū)動電路的可靠性。對于典型的6管構(gòu)成的
2010-05-13 09:24:54 198
198 摘要:介紹了IR2110的內(nèi)部結(jié)構(gòu)和特點,高壓側(cè)懸浮驅(qū)動的原理和自舉元件的設(shè)計。針對IR2110的不足提出了幾種擴展應(yīng)用的方案,并給出了應(yīng)用實例。關(guān)鍵詞:懸浮驅(qū)動;柵電荷;
2010-06-12 08:38:53284 介紹IR2110驅(qū)動模塊的特點,針對其存在的一些不足,給出相關(guān)解決方案。設(shè)計相應(yīng)的優(yōu)化驅(qū)動電路,較好地改善IR2110的驅(qū)動和保護性能,增強其實用性。
Abstract
2010-12-30 15:57:24291 直流電機驅(qū)動電路
以上是兩組
2008-09-22 17:51:282278 
ir2110應(yīng)用電路
美國IR 公司生產(chǎn)的IR2110驅(qū)動器。它兼有光耦隔離(體積小)和電磁隔
2008-12-03 12:18:587372 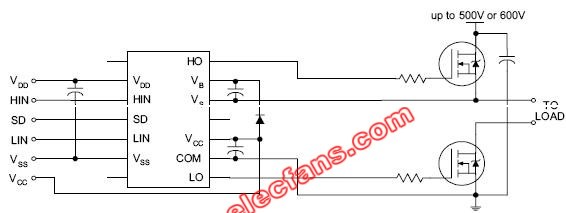
ir2110驅(qū)動電路
圖3 具有負偏壓的
2008-12-03 12:20:495919 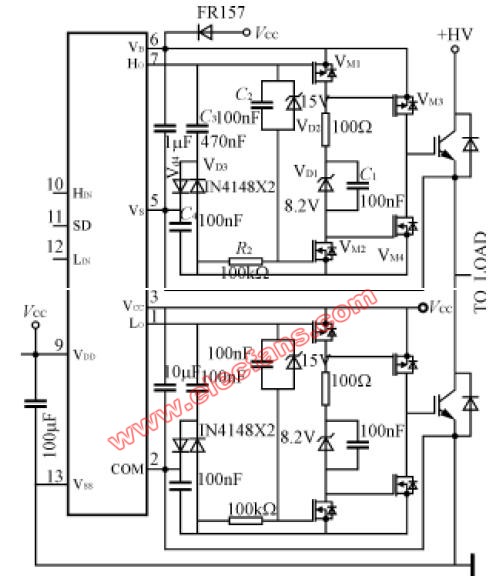
三相橋式電機驅(qū)動電路圖由IR2110組成.
2008-12-03 13:22:376415 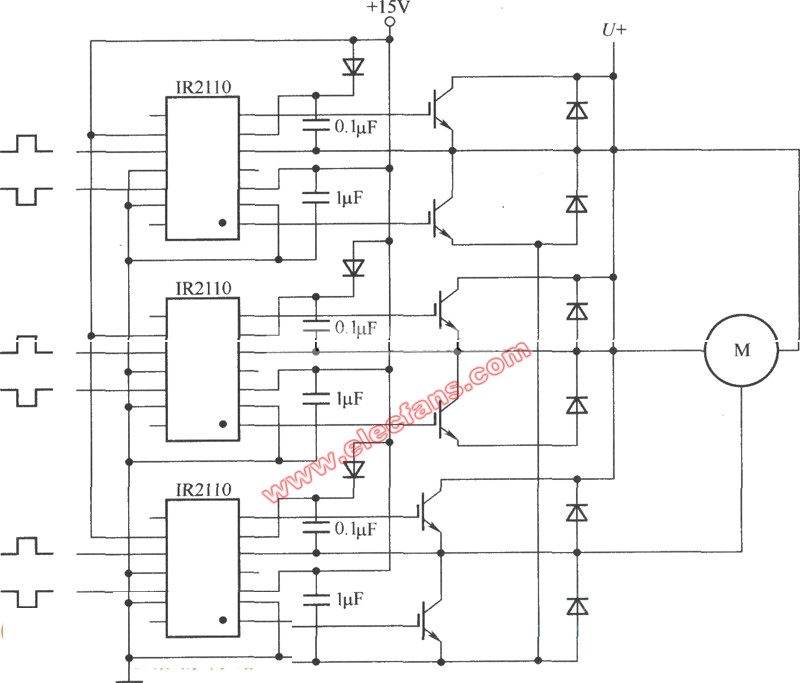
智能小車的直流電機控制【實驗?zāi)康摹苛私庖詥纹瑱C為核心的直流電機控制系統(tǒng)掌握此系統(tǒng)中直流電機驅(qū)動與調(diào)速原理熟悉ICCAVR 軟件編譯環(huán)境,會編寫
2009-03-06 20:21:413038 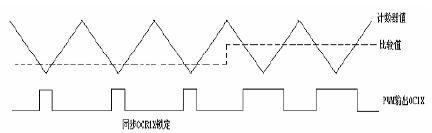
高壓懸浮驅(qū)動器IR2110的原理和擴展應(yīng)用
摘要:介紹了IR2110的內(nèi)部結(jié)構(gòu)和特
2009-07-09 10:59:502506 
什么是直流電機
使用直流電源的電機叫做直流電機。因此只要把直流電機的端子接到直流電源上,就可以使其簡單的動轉(zhuǎn)。直流電機是一種具有優(yōu)良控制特性的電機。
2010-01-09 15:05:173695 
帶電平鉗位功能的IR2110驅(qū)動電路
2010-02-18 11:25:31979 
IR2110在三相橋式電機驅(qū)動電路中的應(yīng)用電路
2010-02-18 22:34:094184 
無刷直流電機控制器UCC3626的原理及應(yīng)用簡介
摘要:介紹了無刷直流電機控制器專用集成芯片UCC3626的內(nèi)部結(jié)構(gòu)、功能特點和基本原理,給出了采用UCC3626和IR2110構(gòu)成三
2010-04-24 10:18:203075 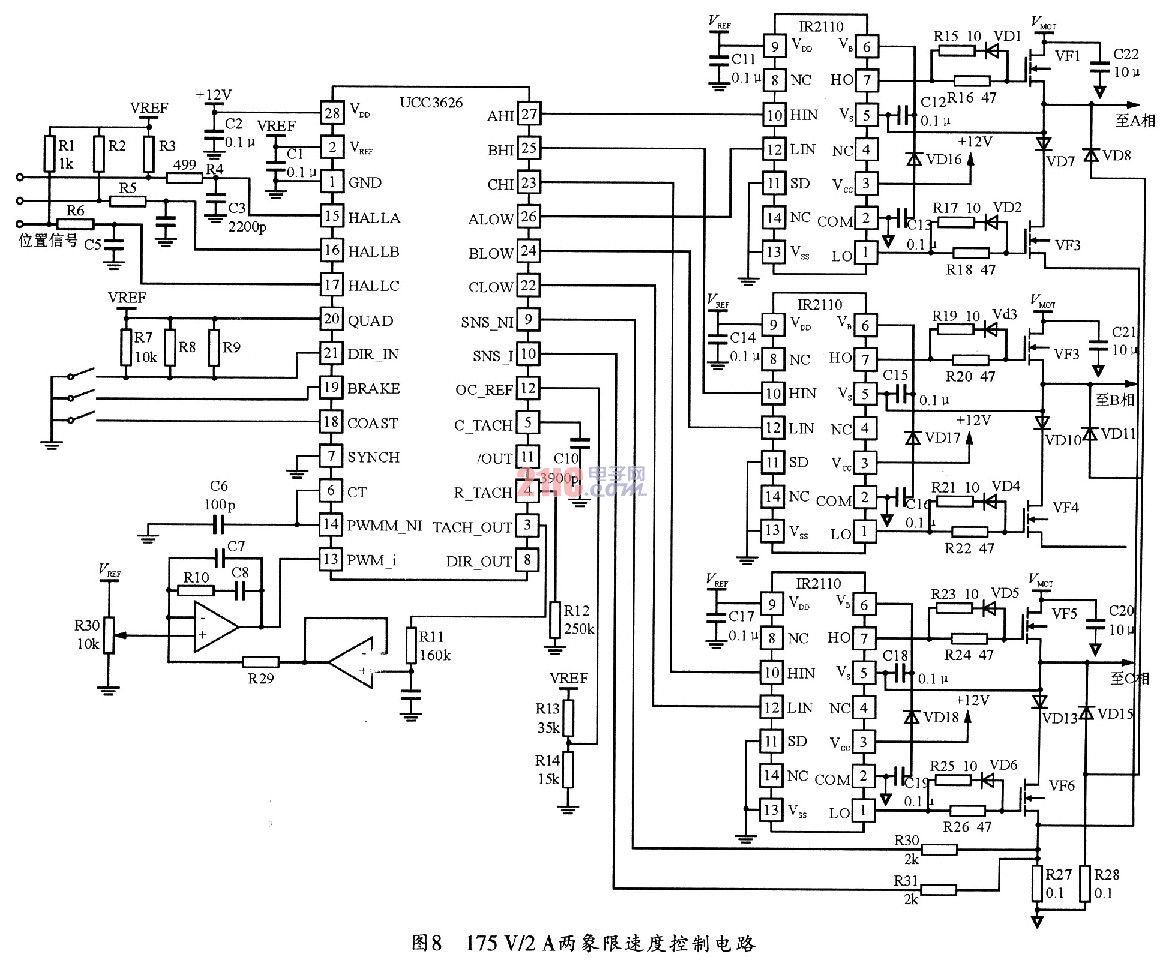
實現(xiàn)了一個基于IR2136的適用于無刷直流電機的三相全橋驅(qū)動電路的設(shè)計。詳細介紹了電路的信號隔離模塊、邏輯綜合電路、三相逆變驅(qū)動電路和過流保護電路,并對電路中的關(guān)鍵參數(shù)進
2012-05-30 15:04:39780 介紹了無刷直流電機的工作原理和控制方式,并提出了一種基于DSP技術(shù)無刷直流電機控制器設(shè)計方案,DSP將CPU、PWM波發(fā)生單元和數(shù)據(jù)采集單元等外設(shè)都集成在一片DSP上,提高了系統(tǒng)集成
2012-11-23 11:25:46280 直流電機PWM調(diào)速控制器的實現(xiàn).rar直流電機PWM調(diào)速控制器的實現(xiàn).rar
2015-10-30 17:48:2888 基于Matlab/Simulink的無刷直流電機控制仿真研究基于Matlab/Simulink的無刷直流電機控制仿真研究基于Matlab/Simulink的無刷直流電機控制仿真研究基于Matlab/Simulink的無刷直流電機控制仿真研究
2015-12-29 10:32:500 基于DSP的無刷直流電機的模糊控制-2006。
2016-04-01 17:11:4923 基于DSP的無刷直流電機模糊控制系統(tǒng)設(shè)計和仿真研究-2009。
2016-04-05 10:53:3318 IR2110 原理 設(shè)計 MOS驅(qū)動。
2016-04-28 10:46:3441 直流電機PWM控制設(shè)計:基于VHDL語言實現(xiàn)直流電機PWM控制設(shè)計,有仿真,有程序,有結(jié)論
2016-11-08 18:51:1650 基于DSP的永磁無刷直流電機弱磁控制系統(tǒng)
2016-12-10 00:05:135 IR2110在開關(guān)磁阻電機調(diào)速系統(tǒng)中的應(yīng)用-蘇瑜田
2017-01-21 12:12:165 調(diào)頻控制的直流電機驅(qū)動電源
2017-09-14 08:43:5615 無刷直流電機的DSP控制及轉(zhuǎn)矩脈動的改善
2017-10-19 09:38:0919 主要介紹了功率驅(qū)動芯片IR2110在無刷直流電機驅(qū)動電路中的應(yīng)用,IR2110芯片是一種雙通道、柵極驅(qū)動、高壓高速功率器件的單片式集成驅(qū)動模塊。永磁無刷直流電機是隨著高性能永磁材料、電機控制技術(shù)和電力電子技術(shù)的發(fā)展而出現(xiàn)的一種新型電機。
2017-12-21 13:37:4517157 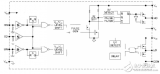
為驅(qū)動器的他勵直流電機H橋PWM調(diào)速系統(tǒng)上實驗表明:IR2110能有效控制功率MOS-FET管實現(xiàn)他勵直流電機的軟啟動和減速制動以及過流保護。
2017-12-21 15:28:3659345 
直流電機具有優(yōu)良的調(diào)速特性, 調(diào)速平滑、方便、調(diào)速范圍廣, 過載能力強, 可以實現(xiàn)頻繁的無級快速啟動、制動和反轉(zhuǎn), 能滿足生產(chǎn)過程中自動化系統(tǒng)各種不同的特殊運行要求, 因此在工業(yè)控制領(lǐng)域, 直流電機
2018-06-11 05:31:0023362 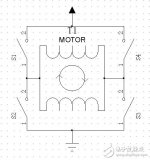
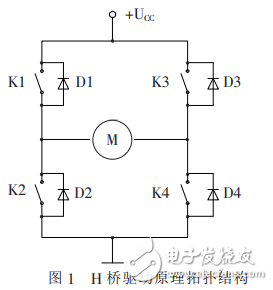
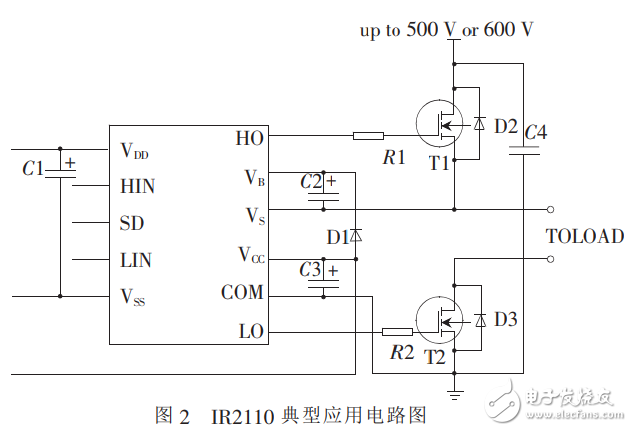
本文開始介紹了mos管的定義與mos管主要參數(shù),其次對ir2110驅(qū)動mos管進行了介紹,其中包括H橋工作原理及驅(qū)動分析、前級PWM信號和方向控制信號邏輯處理電路設(shè)計分析和IR2110介紹及懸浮驅(qū)動電路設(shè)計分析。
2018-03-04 14:20:0378742 本文開始介紹看IR2110的特點和IR2110內(nèi)部功能圖,其次詳細闡述了IR2110的工作原理,對IR2110自舉電路工作原理進行了分析和IR2110柵極電平箝位電路,最后介紹了三款ir2110的應(yīng)用電路。
2018-03-04 15:01:31198108 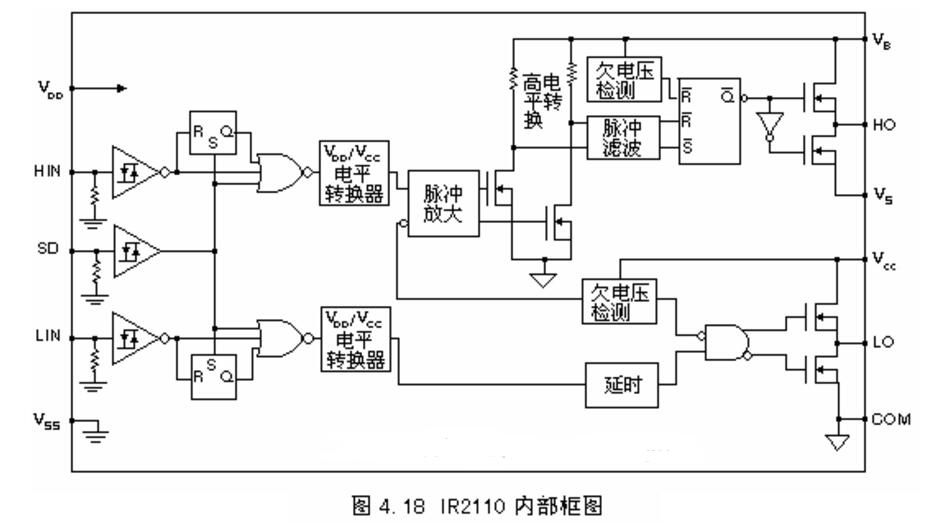
本文開始介紹了IR2110內(nèi)部結(jié)構(gòu)和特點,其次介紹了高壓側(cè)懸浮驅(qū)動的自舉原理與自舉元器件的分析與設(shè)計,最后介紹了IR2110的擴展應(yīng)用與應(yīng)用實例。
2018-03-04 15:20:2263447 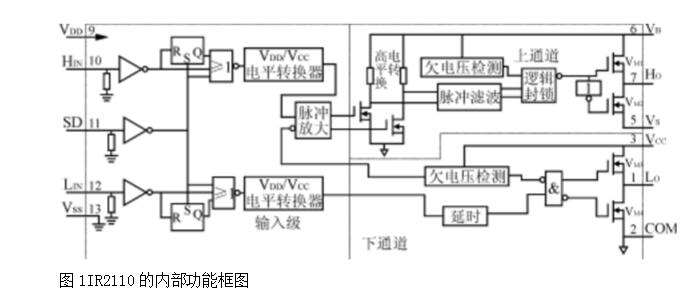
電動牙科座椅選用稀土永磁無刷直流電機驅(qū)動體系,此體系將近年來發(fā)展迅速的無刷直流電機與DSP控制技術(shù)相結(jié)合,選用一片DSP控制器完成對兩臺稀土永磁無刷直流電機的控制,具有低成本、高性能的特色。
2018-11-12 17:54:081130 如果調(diào)速的同時還需要控制直流電機的正轉(zhuǎn)和反轉(zhuǎn),可以搭建一個H橋驅(qū)動電路來驅(qū)動直流電機。
2020-01-11 10:12:359882 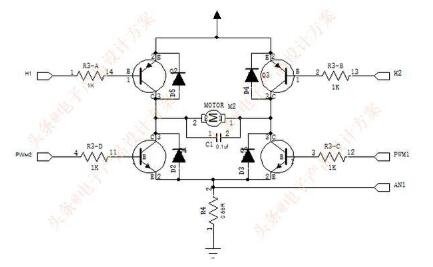
只找到了一個來L298N的驅(qū)動電路,可以驅(qū)動兩個直流電機,需要兩個電源5V,12V。可以實現(xiàn)直流電機正反轉(zhuǎn),停止控制。這里介紹下肖基特二極管。
2020-05-14 10:01:358583 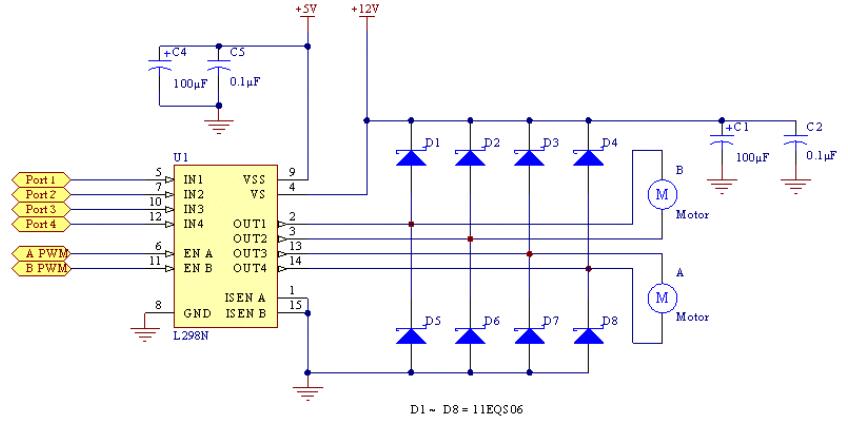
基于FPGA的直流電機控制器的研究與實現(xiàn)。
2021-05-28 10:50:409 有刷直流電機的PWM驅(qū)動方法有幾種。本文將介紹有刷直流電機PWM驅(qū)動方法的H橋恒流驅(qū)動。
2021-06-12 15:54:007104 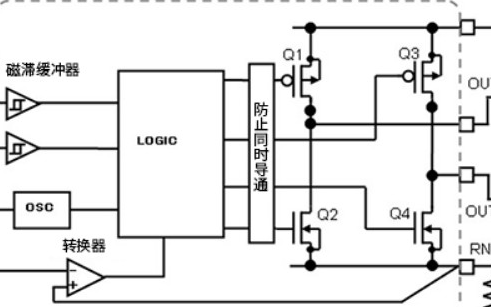
無刷直流電機驅(qū)動控制板(直流逆變電源)-無刷直流電機驅(qū)動控制板無刷直流電機驅(qū)動控制板
2021-07-26 10:53:10148 直流電機控制原理及C程序(通訊電源技術(shù)的組成)-直流電機控制原理及C程序,有需要的可以參考!
2021-09-15 14:08:4041 直流電機PWM控制(電源技術(shù)屬于哪個期刊)-直流電機PWM控制,有需要的可以參考!
2021-09-15 15:29:10138 基于IR2136的無刷直流電機驅(qū)動電路的設(shè)計(當今電源技術(shù)的發(fā)展趨勢是什么)-?基于IR2136的無刷直流電機驅(qū)動電路的設(shè)計,有需要的可以參考!
2021-09-15 17:03:41248 STM32驅(qū)動無刷直流電機(電源技術(shù)是干什么的)-STM32驅(qū)動無刷直流電機包括原理圖和驅(qū)動程序
2021-09-28 14:26:21424 直流電機驅(qū)動設(shè)計(電源技術(shù)雜志評述)-?電機驅(qū)動,直流電機驅(qū)動設(shè)計,包括PWM電機控制原理,MOSFET管驅(qū)動技術(shù),集成電路驅(qū)動芯片介紹
2021-09-28 14:29:07215 本次來寫一下關(guān)于驅(qū)動直流電機的知識,今天目的是驅(qū)動它,下次寫使用PWM精準的對直流電機進行控速。下面是我使用的直流電機圖:
2021-11-23 17:21:4026 在這個Arduino教程中,我們將學習如何使用Arduino控制直流電機。我們來看看控制直流電機的一些基本技術(shù),并通過兩個例子,學習如何使用L298N電機驅(qū)動器和Arduino板來控制直流電機。
2022-04-08 15:06:289847 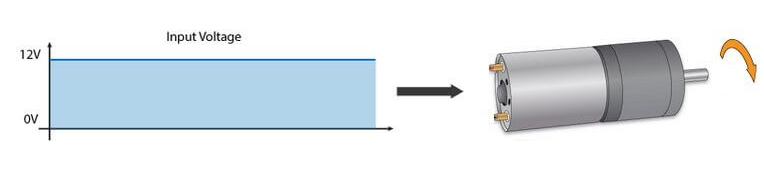
無刷直流電機(驅(qū)動電機及控制技術(shù))
2022-06-23 14:48:515 從本文開始,我們將介紹如何使用H橋電路來驅(qū)動有刷直流電機。在介紹具體的使用H橋電路來驅(qū)動有刷直流電機的驅(qū)動方法之前,本文將介紹H橋電路的原理。
2023-03-02 11:49:241577 
STM32 HAL 驅(qū)動有刷直流電機和無刷直流電機 (有刷)直流電機和無刷直流電機的機電結(jié)構(gòu)不同,(有刷)直流電機通過兩根線供電,由這兩根線的電壓方向控制電機軸轉(zhuǎn)動的方向,調(diào)節(jié)額定范圍內(nèi)的電壓可控制
2023-03-08 11:34:2113 直流電機是一種最基本的電動機類型之一,其速度和方向可以通過控制電流來實現(xiàn)。直流電機常常作為工業(yè)控制系統(tǒng)的主要組成部分,其他領(lǐng)域也廣泛應(yīng)用。
直流電機控制的基本方法包括以下幾種:
2023-03-26 22:21:583924 復激有刷直流電機 微型有刷直流電機基本驅(qū)動電路 微型有刷直流電機速度控制 如何使用PIC單片機來產(chǎn)生控制直流電機速度的PWM信號 微型有刷直流反饋機制 反電磁通量 引言 https://baijiahao
2023-03-30 14:11:397 這一期我們來學習如何控制直流電機。
需要材料:Arduino UNO
直流電機——本文以12V額定電機為例
電機驅(qū)動——本文以L298N為例
直流電機顧名思意,即可以將直流電轉(zhuǎn)化成機械能
2023-03-30 13:46:113 直流電機屬于大功率器件,GPIO無法直接驅(qū)動,需要電機驅(qū)動模塊配合,才能驅(qū)動直流電機. TB6612可以驅(qū)動2個直流電機。由IN1,IN2控制電機旋轉(zhuǎn)方向,由PWM控制電機旋轉(zhuǎn)速度。核心代碼還是
2023-03-31 10:02:059 前言:在成功通過arduino開發(fā)板控制直流電機后,開始嘗試用ros與arduino通信來控制直流電機,為無人小車作準備
硬件 arduino開發(fā)板、杜邦線、直流電機、L298N電機驅(qū)動板 板子的連接參考我之前寫的博客:L298N電機驅(qū)動器和Arduino板來控制直流電機
2023-03-31 11:45:231 有刷直流電機驅(qū)動和無刷直流電機驅(qū)動的原理是不同的,因此,在驅(qū)動方式上也存在較大的差異。
2023-04-01 15:36:321824 直流電機的單向控制 直流電機的單向控制較為簡單,可以通過開關(guān)的通斷來接通和斷開直流電源,實現(xiàn)電機的啟動與停止控制,開關(guān)控制直流電機如圖9-2所示。也可以通過三極管、場效應(yīng)管、繼電器等對直流電機
2023-04-03 11:41:212 直流電機驅(qū)動電路是一種將直流電源轉(zhuǎn)換為直流電機所需的電流和電壓的電路。它主要由電源模塊、電流控制模塊和速度控制模塊組成。這些模塊的功能和相互之間的關(guān)系是實現(xiàn)電機穩(wěn)定運行的關(guān)鍵。 電源模塊 電源模塊
2023-12-20 17:11:51401 直流電機的勵磁是直流電嗎?直流電機勵磁的作用?直流電機勵磁方式的區(qū)分? 直流電機的勵磁是直流電。直流電機勵磁的作用是產(chǎn)生磁場,使電機能夠轉(zhuǎn)動。 直流電機勵磁方式可以分為自勵磁和獨立勵磁兩種。 自勵
2024-01-18 16:07:26726
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論