的了解和參考。 伺服電機(jī)對拖測功機(jī) 一、伺服電機(jī)對拖測功機(jī)的工作原理 伺服電機(jī)對拖測功機(jī)主要由兩臺伺服電機(jī)、控制系統(tǒng)、測量系統(tǒng)、加載機(jī)構(gòu)等組成。其中,兩臺伺服電機(jī)分別作為驅(qū)動(dòng)電機(jī)和負(fù)載電機(jī),通過傳動(dòng)機(jī)構(gòu)相互連
2024-03-21 15:22:49 90
90 
伺服電機(jī)主要由伺服驅(qū)動(dòng)器、電動(dòng)機(jī)和其他相關(guān)部件組成。伺服馬達(dá)用來提供動(dòng)力,而伺服控制器則負(fù)責(zé)調(diào)整輸出速度和位置,并將其轉(zhuǎn)化為電信號發(fā)送給執(zhí)行機(jī)構(gòu)。
2024-02-22 11:26:35148 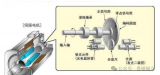
交流伺服電機(jī)是一種通過閉環(huán)反饋控制系統(tǒng)實(shí)現(xiàn)精確位置、速度和轉(zhuǎn)矩控制的電機(jī)。它在工業(yè)自動(dòng)化、機(jī)械加工、機(jī)器人領(lǐng)域有著廣泛的應(yīng)用。本文將詳細(xì)介紹交流伺服電機(jī)的工作原理和控制方式。 一、交流伺服電機(jī)
2024-02-18 14:59:25268 是工業(yè)自動(dòng)化中經(jīng)常需求的功能之一。本文將詳細(xì)介紹伺服電機(jī)的反轉(zhuǎn)原理以及相序調(diào)整方法。 一、伺服電機(jī)反轉(zhuǎn)原理 在介紹伺服電機(jī)反轉(zhuǎn)原理之前,我們先來了解一下伺服電機(jī)的基本工作原理。伺服電機(jī)由電機(jī)、編碼器和控制器三部分
2024-02-18 14:35:29541 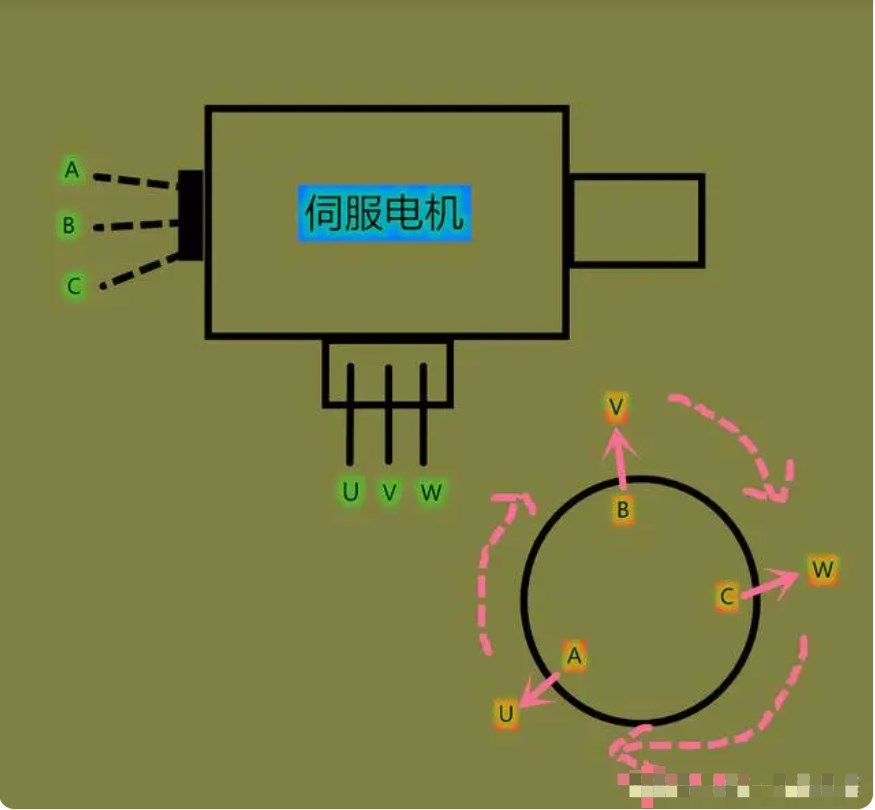
在本Arduino伺服電機(jī)教程中,您將學(xué)習(xí)如何使用Arduino UNO板和電位器控制伺服電機(jī)。
2024-02-11 10:11:00352 
電機(jī)的定位方式有兩種,一種是絕對定位,另一種是相對定位。本文將詳細(xì)介紹伺服電機(jī)的絕對定位和相對定位方法,并探討其適用場景和特點(diǎn)。 絕對定位是指在伺服電機(jī)初始化之前,電機(jī)控制器需要準(zhǔn)確地知道電機(jī)的當(dāng)前位置,這樣才
2024-02-05 17:39:501070 伺服電機(jī)是一種通過反饋機(jī)制實(shí)現(xiàn)精確位置和速度控制的電機(jī)。伺服電機(jī)通常由電機(jī)、控制器和編碼器等組成。控制器接收來自編碼器的反饋信號,并根據(jù)指令信號調(diào)節(jié)電機(jī)的速度和位置。伺服電機(jī)廣泛應(yīng)用于需要高精度定位
2024-02-04 10:10:45247 伺服電機(jī)原理與應(yīng)用 一、伺服電機(jī)原理 伺服電機(jī)是一種控制系統(tǒng),通過傳感器接受反饋信號,將輸出信號與輸入信號進(jìn)行比較,并通過控制器對輸出信號進(jìn)行調(diào)整,以實(shí)現(xiàn)精確控制電機(jī)運(yùn)動(dòng)的位置、速度和力矩。伺服電機(jī)
2024-01-22 16:32:26281 伺服電機(jī)是一種特殊的電機(jī),可以根據(jù)控制信號準(zhǔn)確地控制角度、速度和位置。伺服電機(jī)的最簡單控制方法可以分為開環(huán)控制和閉環(huán)控制兩種。 開環(huán)控制:開環(huán)控制是指通過直接提供控制信號,使伺服電機(jī)旋轉(zhuǎn)到所設(shè)
2024-01-14 14:40:27570 伺服電機(jī)和伺服電機(jī)驅(qū)動(dòng)器是緊密相關(guān)的兩個(gè)部分,它們通常作為一個(gè)完整的系統(tǒng)來實(shí)現(xiàn)精確的運(yùn)動(dòng)控制。
2024-01-13 17:53:221243 SMART控制的驅(qū)動(dòng)器自動(dòng)運(yùn)行時(shí)如何實(shí)現(xiàn)伺服電機(jī)反轉(zhuǎn)的
2024-01-10 06:30:14
電動(dòng)汽車電機(jī)控制器是電動(dòng)汽車的核心部件之一,它的主要功能是根據(jù)駕駛員的操作和汽車的運(yùn)行狀態(tài),對電動(dòng)汽車電機(jī)控制器是電動(dòng)汽車的核心部件之一,它的主要功能是根據(jù)駕駛員的操作和汽車的運(yùn)行狀態(tài),對電動(dòng)汽車
2024-01-09 13:48:49356 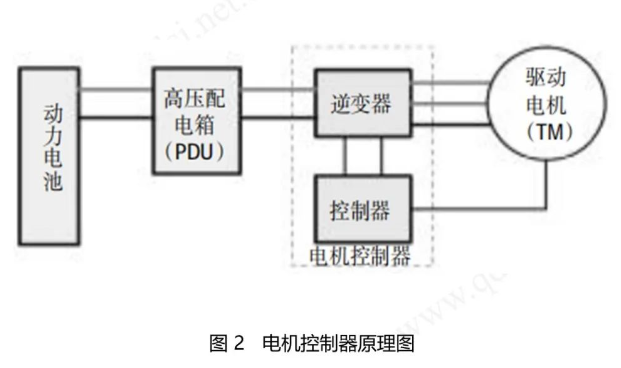
伺服電機(jī)一運(yùn)行控制器報(bào)F31101和F7452。控制器沒有問題,伺服電機(jī)可能是那部分壞了?
如果是電機(jī)軸承壞了,可以自己更換嗎?
2024-01-09 09:26:03
。相比于其他傳動(dòng)方式,如傳統(tǒng)的帶傳動(dòng)和齒輪傳動(dòng)等,電機(jī)光軸傳動(dòng)的效率更高。 2. 緊湊結(jié)構(gòu):電機(jī)光軸傳動(dòng)具有簡單、緊湊的結(jié)構(gòu)。光軸傳動(dòng)通常由電機(jī)和光軸組成,減少了傳動(dòng)部件的數(shù)量和體積,提高了整體結(jié)構(gòu)的緊湊性。這使得電
2024-01-04 11:26:24389 伺服電機(jī)效率一般是多少?選型時(shí)也得考慮到這個(gè)問題吧?
變頻電機(jī)一般都標(biāo)功率因素,指的就是電機(jī)實(shí)際的輸出功率吧?
異步伺服效率 88%;
同步伺服效率 100%,采用絕對值編碼器時(shí)效率下降10%-20%.
2023-12-28 06:46:24
伺服電機(jī)的三種控制方式 如何確定選擇伺服電機(jī)控制方式? 伺服電機(jī)是一種能夠根據(jù)輸入信號實(shí)時(shí)調(diào)整轉(zhuǎn)速和位置的電動(dòng)機(jī)。它通常用于需要高精度、高效率、高可靠性的工業(yè)領(lǐng)域,如機(jī)床、機(jī)器人、印刷設(shè)備等。伺服
2023-12-26 14:02:19579 什么是伺服電機(jī)的原點(diǎn)設(shè)置?伺服電機(jī)零點(diǎn)和原點(diǎn)的區(qū)別 伺服電機(jī)的原點(diǎn)設(shè)置,簡單來說,就是確定電機(jī)的起始位置或參考位置。在使用伺服電機(jī)控制系統(tǒng)時(shí),需要將電機(jī)的位置與設(shè)定的參考位置進(jìn)行對齊,以確保精準(zhǔn)
2023-12-25 13:57:591129 伺服電機(jī)速度增益的作用? 伺服電機(jī)速度增益是伺服控制系統(tǒng)中的一個(gè)重要參數(shù),它對于電機(jī)的運(yùn)行速度和穩(wěn)定性起著關(guān)鍵作用。本文將詳盡、詳實(shí)、細(xì)致地介紹伺服電機(jī)速度增益的作用。 一、伺服電機(jī)的基本原理 伺服
2023-12-25 13:57:55555 什么是過沖 過沖是指伺服電機(jī)在停止運(yùn)轉(zhuǎn)之前,由于慣性等原因繼續(xù)運(yùn)動(dòng)超過設(shè)定的目標(biāo)位置,導(dǎo)致機(jī)械系統(tǒng)或工作部件發(fā)生不受控制的運(yùn)動(dòng)。通常有兩種類型的過沖:正向過沖和負(fù)向過沖。正向過沖是指伺服電機(jī)的停止位置超過了目標(biāo)位置,而負(fù)
2023-12-25 11:47:22309 PLC(可編程邏輯控制器)是一種常用于工業(yè)自動(dòng)化系統(tǒng)的控制器。伺服電機(jī)是一種具有高精度、高速度和高可靠性的電動(dòng)機(jī),可以用于實(shí)現(xiàn)精確控制和準(zhǔn)確位置的要求。在PLC中,我們可以使用不同的方法來控制伺服
2023-12-25 11:16:30800 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場景下,我們該如何選擇伺服電機(jī)的控制方式呢?
2023-12-20 18:22:53894 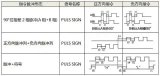
,控制精度越高。 剛性過大的后果包括: 1. 動(dòng)態(tài)性能降低:剛性過大會(huì)使得伺服電機(jī)的動(dòng)態(tài)響應(yīng)能力降低,降低控制系統(tǒng)的速度和加速度性能。 2. 控制精度下降:剛性過大會(huì)導(dǎo)致伺服電機(jī)的位置跟蹤精度下降,無法準(zhǔn)確控制運(yùn)動(dòng)軌跡,影響產(chǎn)品
2023-12-20 17:36:553055 伺服電機(jī)是否必須有對應(yīng)的伺服驅(qū)動(dòng)器來控制?沒有伺服驅(qū)動(dòng)器能使用伺服電機(jī)嗎?怎么控制?首次接觸,不懂
2023-12-15 07:49:19
最近使用的有臺帶編碼器的伺服電機(jī)(配著相應(yīng)的伺服驅(qū)動(dòng)器)漏油,想拆開更換油封,但是聽說伺服電機(jī)拆開自己不能安裝。因?yàn)?b class="flag-6" style="color: red">涉及到編碼器的位置。我想問一下:
1.帶編碼器的電機(jī)能拆開嗎?
2.電機(jī)拆開的話
2023-12-15 06:57:52
伺服控制器是一種用于精確控制電機(jī)運(yùn)動(dòng)的電子設(shè)備,通過接收來自控制系統(tǒng)的指令以及監(jiān)測電機(jī)的位置、速度等參數(shù),實(shí)現(xiàn)對電機(jī)的精確控制。基于高精度、高速度、高可靠性等優(yōu)點(diǎn),在制造業(yè)、航空航天、醫(yī)療設(shè)備等領(lǐng)域
2023-12-14 18:15:01185 
為什么用PLC控制伺服控制器一給使能電機(jī)就轉(zhuǎn)(此時(shí)PLC還沒運(yùn)行呢),控制器和電機(jī)都已經(jīng)測試好了
2023-12-11 07:00:33
變頻電機(jī)和伺服電機(jī)的區(qū)別? 變頻電機(jī)和伺服電機(jī)是現(xiàn)代工業(yè)領(lǐng)域中常用的兩種電動(dòng)機(jī)類型。雖然它們都可以實(shí)現(xiàn)電動(dòng)機(jī)的運(yùn)轉(zhuǎn),但在設(shè)計(jì)原理、控制方式以及應(yīng)用范圍等方面存在許多區(qū)別。本文將從這些方面進(jìn)行詳盡
2023-12-08 10:47:38748 伺服電機(jī)選型是在設(shè)計(jì)或選擇機(jī)械設(shè)備時(shí),根據(jù)工作需求和性能參數(shù)來確定適合的伺服電機(jī)。伺服電機(jī)是一種特殊類型的電機(jī),具有高精度控制和反饋系統(tǒng),廣泛應(yīng)用于機(jī)械、自動(dòng)化和機(jī)器人領(lǐng)域。 伺服電機(jī)選型計(jì)算
2023-12-01 16:20:16561 DD馬達(dá)和伺服電機(jī)是兩種常見的電機(jī)類型,它們在許多方面都有所不同。下面將詳細(xì)介紹它們的區(qū)別。 一、定義和結(jié)構(gòu) DD馬達(dá),全稱為DD馬達(dá)驅(qū)動(dòng)器,是一種通過控制器來實(shí)現(xiàn)直流電機(jī)正反轉(zhuǎn)的設(shè)備。它主要由電機(jī)
2023-11-24 14:17:482549 目前做的方案是伺服電機(jī)方案,但是成本有點(diǎn)高,想改成變頻器+普通三相異步電動(dòng)機(jī)控制。
不知道可不可行。
大家可否給一點(diǎn)建議。伺服模鍛壓力機(jī)不知道有沒有干過的。
2023-11-21 06:03:42
伺服電機(jī)控制器的類型包括降壓起動(dòng)器、調(diào)速驅(qū)動(dòng)器、智能控制器等三種分類,另外控制方面主要以方波控制、正弦波控制等兩種方式,那么下面就詳細(xì)介紹一下相關(guān)內(nèi)容。
2023-11-19 10:00:29252 控制器、伺服電機(jī)和減速器是工業(yè)機(jī)器人運(yùn)行的關(guān)鍵部件。它們負(fù)責(zé)機(jī)器人的精確定位、力量傳遞和運(yùn)動(dòng)控制。在本文中,我們將詳細(xì)介紹這些核心零部件的特點(diǎn)和作用。
2023-11-18 16:38:02947 伺服電機(jī) “伺服”一詞是來源于希臘語“奴隸”的意思,那么伺服電機(jī)也可以理解為絕對服從控制信號指揮電機(jī),所以伺服電機(jī)是指在伺服系統(tǒng)中被控制的電機(jī)。 如果單指一個(gè)電機(jī)的話,那只能算一個(gè)被控的機(jī)械元件
2023-11-16 16:13:33284 伺服電機(jī)控制器的類型包括降壓起動(dòng)器、調(diào)速驅(qū)動(dòng)器、智能控制器等三種分類,另外控制方面主要以方波控制、正弦波控制等兩種方式。
2023-11-16 10:26:16269 伺服電機(jī)在自動(dòng)化領(lǐng)域產(chǎn)品中扮演著重要角色,通常用于項(xiàng)目中較精確的速度或位置控制部件的驅(qū)動(dòng)。在面臨多樣化的選型需求時(shí),如何正確選擇合適的伺服電機(jī)成為一項(xiàng)重要任務(wù)。下面我們將分享一些經(jīng)驗(yàn),以幫助您快速選取適用的伺服電機(jī)。
2023-11-15 10:25:39228 
伺服電機(jī)控制一個(gè)排線收卷裝置,不知道是不是排線交接地方帶電的原因,操作工說一到交接的地方伺服電機(jī)就會(huì)馬上停止下來,而伺服驅(qū)動(dòng)器是直接斷電了,伺服驅(qū)動(dòng)器也接地了,不知道怎么解決,想問一下大家
2023-11-14 07:02:16
要準(zhǔn)確地定義伺服電機(jī),我們首先需理解其核心特性:反饋與閉環(huán)控制。伺服電機(jī)憑借這些特性,能精確控制扭矩、速度或位置,即使在零速度下,也能保持足夠的扭矩以鎖定負(fù)載。
2023-11-10 10:46:39246 
我有一個(gè)s120雙電機(jī)模塊(6SL3120-2TE13-0AA4)帶伺服電機(jī)(1FL6064-1AC61-0AA1),用伺服控制。原來運(yùn)行正常,后面有報(bào)編碼器異常,把帶編碼器速度控制改為無編碼器速度
2023-11-09 07:32:05
電機(jī)斷軸,與功率及傳動(dòng)方式有關(guān)嗎? 電機(jī)斷軸與功率及傳動(dòng)方式有著密切的關(guān)系。在本文中,我們將詳細(xì)探討電機(jī)斷軸與功率及傳動(dòng)方式之間的聯(lián)系。 首先,電機(jī)的功率對其斷軸的影響是顯而易見的。功率是衡量電機(jī)
2023-11-06 11:46:281133 伺服電機(jī)重要的應(yīng)用是定位控制。位置控制有兩個(gè)需要控制的物理量,即速度和位置。準(zhǔn)確地說,是控制伺服電機(jī)到達(dá)位置的速度和停止的速度。
2023-11-06 10:29:18331 電子發(fā)燒友網(wǎng)站提供《基于FPGA的步進(jìn)電機(jī)伺服控制器設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-25 09:10:40 0
0 通過總線控制伺服電機(jī)時(shí),如何進(jìn)行回零(尋參考點(diǎn))控制?這里就CANOPEN伺服電機(jī)的回零控制方法分享給大家。
2023-10-23 11:42:201627 
是通過位置、速度和力矩三種方式對伺服電機(jī)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位,是傳動(dòng)技術(shù)的高端產(chǎn)品。主流的伺服驅(qū)動(dòng)器均采用數(shù)字信號處理器(DSP)作為控制核心,可以
2023-10-11 08:07:531081 
伺服驅(qū)動(dòng)器中可以集成多少種電機(jī)驅(qū)動(dòng)控制電路?
2023-10-08 07:07:48
要減輕伺服電機(jī)的磨損,可以采取以下措施: (1)適當(dāng)?shù)臐櫥憾ㄆ趯?b class="flag-6" style="color: red">伺服電機(jī)進(jìn)行潤滑是減輕磨損的重要步驟。使用適合的潤滑劑,按照制造商的建議和規(guī)定進(jìn)行潤滑,確保電機(jī)內(nèi)部零部件的摩擦和磨損得到有效減少
2023-09-08 17:05:01250 
在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-09-08 11:22:48734 香蕉派BPI-FSM8191D伺服電機(jī)控制器是香蕉派開源社區(qū)與峰岹科技合作打造的一款工業(yè)級伺服電機(jī)控制產(chǎn)品。是一款應(yīng)用于驅(qū)動(dòng)旋轉(zhuǎn)伺服電機(jī),直線伺服電機(jī)以及力矩電機(jī)的伺服模塊,在實(shí)際應(yīng)用中,由主控板
2023-09-04 09:16:12
什么是伺服電機(jī)?伺服是一種電磁裝置,利用負(fù)反饋機(jī)制將電信號轉(zhuǎn)換為受控運(yùn)動(dòng)。基本上,伺服系統(tǒng)的行為類似于執(zhí)行器,提供對速度、加速度和線性或角度位置的精確控制。它由四件事組成:直流電機(jī)、位置傳感器、齒輪
2023-08-30 08:08:521675 伺服電機(jī)包括一個(gè)電機(jī)、一個(gè)編碼器和一個(gè)控制器組成。編碼器給出反饋信號,控制器接收反饋信號并控制電機(jī)轉(zhuǎn)速、方向和位置。控制器可以直接編程,以便更好更精確地控制電機(jī)。
2023-08-26 11:13:282731 伺服電機(jī)的控制方式比異步電機(jī)更為復(fù)雜。伺服電機(jī)需要一個(gè)控制器來監(jiān)視電機(jī)狀態(tài)并做出相應(yīng)的調(diào)整,這需要一定的技術(shù)和經(jīng)驗(yàn)。而異步電機(jī)的控制方式更為簡單,只需要通過變頻器等設(shè)備對其進(jìn)行調(diào)速即可。
2023-08-26 11:12:322036 伺服電機(jī)是一種常用于控制精度要求較高的機(jī)械設(shè)備的電機(jī)。它通過精密的控制裝置來保持輸出轉(zhuǎn)矩或轉(zhuǎn)速的穩(wěn)定性,實(shí)現(xiàn)高精度的運(yùn)動(dòng)控制。伺服電機(jī)內(nèi)部包含了控制器、編碼器、功率放大器和電機(jī)等幾個(gè)主要組成部分,它們協(xié)同工作來實(shí)現(xiàn)控制。
2023-08-26 11:11:272497 控制器設(shè)置問題:控制器中一些參數(shù)設(shè)置不當(dāng),可能會(huì)導(dǎo)致伺服電機(jī)速度不穩(wěn)定。解決這種情況需要查閱控制器的設(shè)定手冊,詳細(xì)檢查控制器參數(shù)設(shè)置是否合理。
2023-08-26 11:02:064414 安川伺服電機(jī)的核心是電機(jī)和伺服控制器。伺服控制器通過檢測電機(jī)轉(zhuǎn)速和位置等反饋信息,精確控制電機(jī)的旋轉(zhuǎn)速度、位置和力矩等參數(shù)。而這種精準(zhǔn)的控制方式,又可以使機(jī)器人和自動(dòng)化設(shè)備在各種復(fù)雜環(huán)境中更加靈活和高效地工作。
2023-08-17 08:52:19637 
在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-08-09 09:25:28599 伺服驅(qū)動(dòng)器又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機(jī)的一種控制器,其作用類似于變頻器作用于普通交流馬達(dá),屬于伺服系統(tǒng)的一部分。一般是通過位置、速度和力矩三種方式對伺服電機(jī)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位。
2023-08-08 10:38:194721 
本項(xiàng)目制作了一個(gè)基于RT-Thread+RA6M4的無刷電機(jī)控制器,可以實(shí)現(xiàn)是無刷電機(jī)的伺服控制。可以應(yīng)用在小型CNC、人機(jī)交互等場景。
2023-08-02 17:51:42443 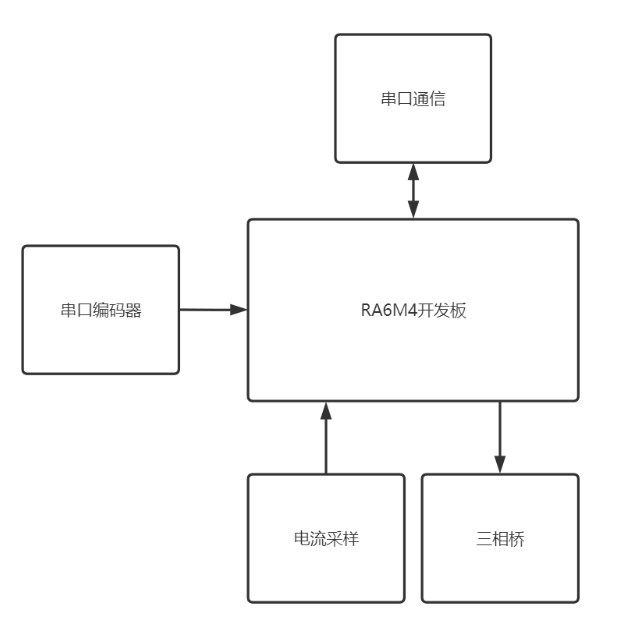
在這篇文章中,我們將學(xué)習(xí)如何使用操縱桿和Arduino控制伺服電機(jī)。我們將看到有關(guān)操縱桿,其銷,其結(jié)構(gòu)和工作的概述。我們將從操縱桿中提取有用的數(shù)據(jù),這些數(shù)據(jù)將成為控制伺服電機(jī)的基礎(chǔ)。
2023-07-27 11:47:461102 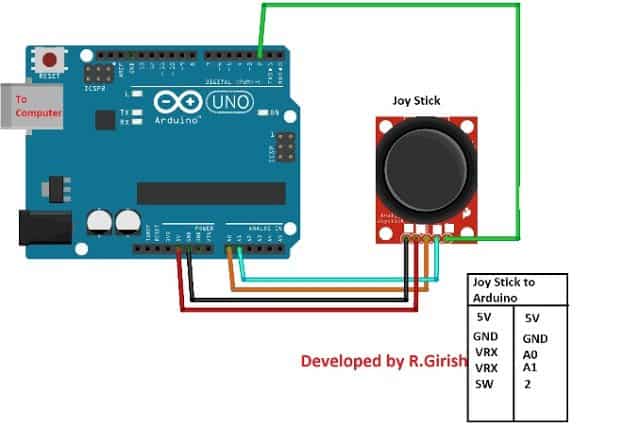
行星減速機(jī)和伺服電機(jī)是目前廣泛應(yīng)用于工業(yè)領(lǐng)域的機(jī)械裝置。它們在實(shí)現(xiàn)機(jī)械傳動(dòng)和控制方面起著重要的作用。
2023-07-26 09:47:42227 伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場景下,該如何確定選擇伺服電機(jī)控制方式?
2023-07-26 09:22:20976 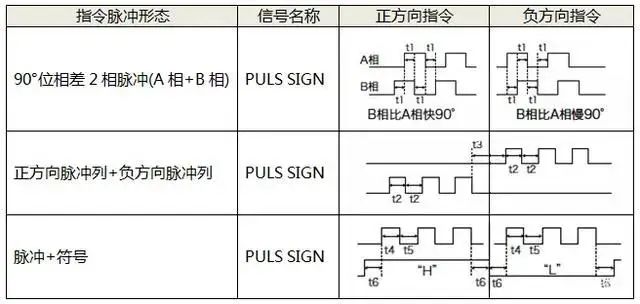
BPI-FSM8191D伺服電機(jī)控制器是香蕉派開源社區(qū)與峰岹科技合作打造的一款工業(yè)級伺服電機(jī)控制產(chǎn)品。是一款應(yīng)用于驅(qū)動(dòng)旋轉(zhuǎn)伺服電機(jī),直線伺服電機(jī)以及力矩電機(jī)的伺服模塊,在實(shí)際應(yīng)用中,由主控板與功率
2023-07-13 19:07:15426 在自動(dòng)化領(lǐng)域,運(yùn)動(dòng)控制器和基本的伺服驅(qū)動(dòng)器之間存在著微妙的差異。許多應(yīng)用都需要運(yùn)動(dòng)控制器和伺服驅(qū)動(dòng)器共同組成一個(gè)完整的系統(tǒng),因此,掌握每個(gè)設(shè)備的功能和智能水平至關(guān)重要。 ? 伺服系統(tǒng) 伺服驅(qū)動(dòng)器
2023-07-10 10:02:25982 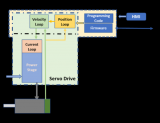
伺服電機(jī)是我們常用的一種電機(jī),在本文的案例中,將學(xué)習(xí)如何使用單片機(jī)控制伺服電機(jī),案例以PIC16F877A單片機(jī)作為接口的連接與控制示例。
2023-07-06 10:53:142779 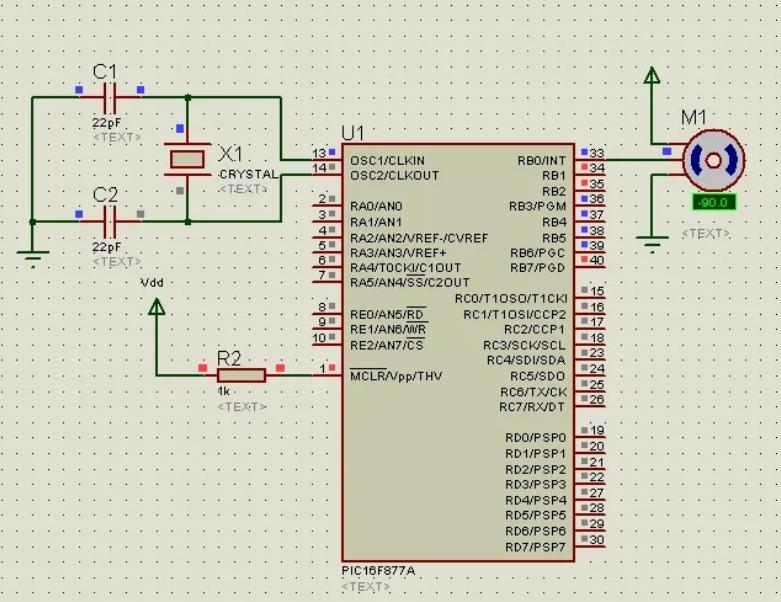
伺服控制芯片TMC4671性能概述 使用TMC4671伺服控制芯片可以加速設(shè)計(jì)伺服控制器。 TMC4671是一款完全集成伺服控制芯片,為直流無刷電機(jī)、永磁同步電機(jī)、2相步進(jìn)電機(jī)、直流有刷電機(jī)
2023-07-06 10:48:29846 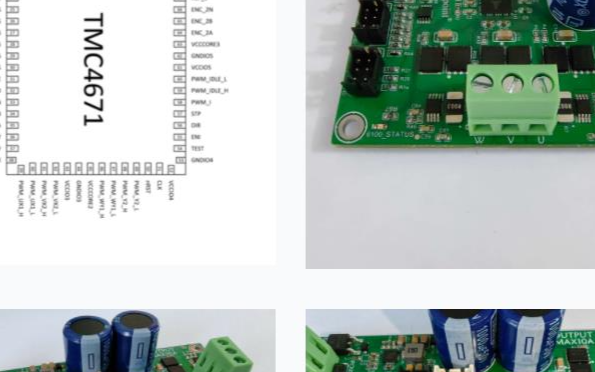
伺服電機(jī)具有獨(dú)特的特性,即根據(jù)輸入信號的脈沖寬度轉(zhuǎn)向特定角度(0,90,180)。這些伺服電機(jī)廣泛用于機(jī)器人應(yīng)用、機(jī)械控制等。通常微控制器將用于控制伺服電機(jī),但偶爾您會(huì)發(fā)現(xiàn)一些其他IC用于此目的。本文介紹了伺服電機(jī)的工作原理和工作原理。
2023-06-29 15:44:291641 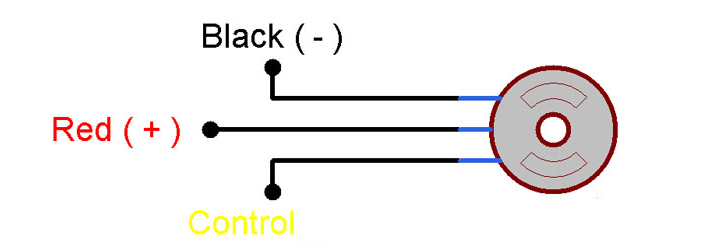
伺服電機(jī)是一種可以精確控制角度方向的電子設(shè)備。當(dāng)涉及到以精確角度移動(dòng)或旋轉(zhuǎn)物體時(shí),伺服電機(jī)是此類應(yīng)用的最佳選擇。它由一個(gè)簡單的直流電機(jī)和位置反饋系統(tǒng)組成,用于確定電機(jī)位置。我們將使用可以360o旋轉(zhuǎn)
2023-06-18 09:58:21406 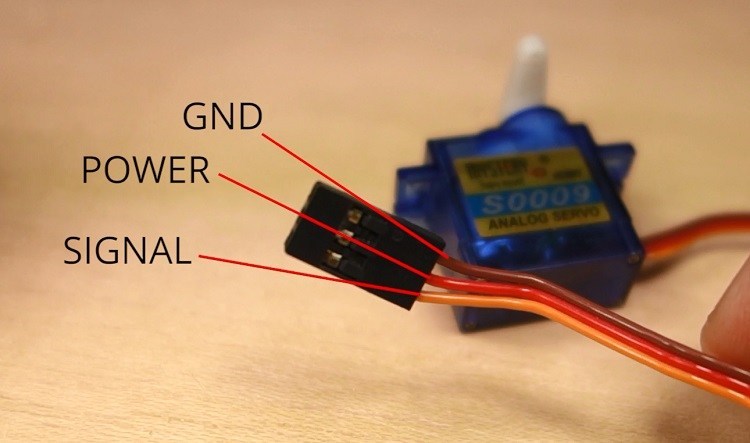
操縱桿,誰不喜歡它!我們想將操縱桿的樂趣融入到電子設(shè)備中,并設(shè)計(jì)了一個(gè)使用操縱桿控制器控制伺服電機(jī)的電路。伺服電機(jī)具有強(qiáng)大的應(yīng)用,主要以其對距離和角度的精確控制而聞名。借助伺服數(shù)據(jù)引腳的準(zhǔn)確
2023-06-16 17:31:41408 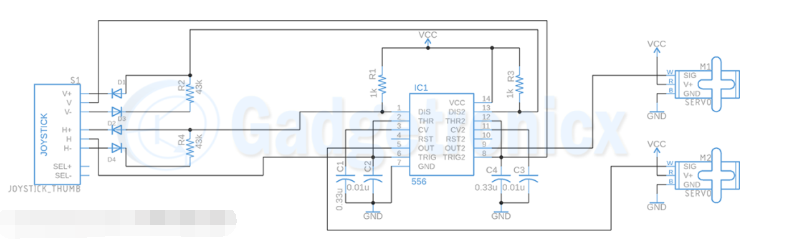
信號來控制電機(jī)的轉(zhuǎn)動(dòng)角度和速度。 步進(jìn)伺服是一種基于步進(jìn)電機(jī)的改進(jìn)型產(chǎn)品,其工作原理是在步進(jìn)電機(jī)上增加了閉環(huán)控制系統(tǒng),以實(shí)現(xiàn)更高的精度和穩(wěn)定性。步進(jìn)伺服可以通過反饋控制器獲取電機(jī)的實(shí)際位置和速度信息,并與設(shè)
2023-06-13 08:30:02492 電機(jī)控制器工作原理詳解 電機(jī)控制器是控制電動(dòng)機(jī)運(yùn)行的關(guān)鍵部件,通過對電機(jī)進(jìn)行電流、電壓、頻率等參數(shù)的控制來實(shí)現(xiàn)對電機(jī)運(yùn)行狀態(tài)的調(diào)節(jié),具有很大的應(yīng)用價(jià)值和意義。其工作原理如下: 1. 電機(jī)控制器
2023-06-08 11:38:092605 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來控制,位置控制是通過發(fā)脈沖來控制。
2023-05-24 09:44:00635 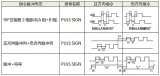
。一般是通過位置、速度和力矩三種方式對伺服電機(jī)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位,目前是傳動(dòng)技術(shù)的高端產(chǎn)品。
2023-05-18 10:45:25458 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場景下,我們該如何選擇伺服電機(jī)的控制方式呢?
2023-05-16 15:56:152476 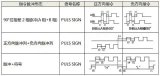
一、什么是伺服電機(jī)?伺服電機(jī)是一種可以通過控制器精確地控制位置、速度和加速度的電機(jī),主要由電機(jī)、編碼器和控制器三部分組成,具有高轉(zhuǎn)矩、高精度、快速響應(yīng)和低轉(zhuǎn)速穩(wěn)定特性,能夠在負(fù)載擾動(dòng)、電壓變化及機(jī)械
2023-05-12 11:30:06624 
控制器控制伺服電機(jī)通常采用兩種指令方式:數(shù)字脈沖和模擬信號。數(shù)字脈沖這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號;伺服驅(qū)動(dòng)器工作在位
2023-05-09 14:43:031009 通常由電機(jī)控制器、電機(jī)驅(qū)動(dòng)、電機(jī)本體(多為伺服電機(jī))組成。電機(jī)控制器具備智能運(yùn)算功能,并可傳送指令以驅(qū)動(dòng)電機(jī)。驅(qū)動(dòng)可提供增壓電流,根據(jù)控制器指令以驅(qū)動(dòng)電機(jī)。電機(jī)可以直接移動(dòng)機(jī)器人, 也可通過傳動(dòng)
2023-05-06 11:06:371 伺服電機(jī)主要有兩類:直流無刷電機(jī)和永磁同步電機(jī)。這兩者之間的區(qū)別、聯(lián)系、結(jié)構(gòu)和原理在許多文章中都有涉及,故在此不再贅述。需要了解的可以在這文后相關(guān)鏈接里找到相關(guān)內(nèi)容。許多關(guān)于直
流伺服電機(jī)控制
2023-05-06 10:29:460 伺服電機(jī)中,位置傳感器通常是簡單的電位器。這些設(shè)備捕獲的實(shí)際位置被反饋到誤差檢測器,并與目標(biāo)位置進(jìn)行比 較。然后控制器根據(jù)誤差修正電機(jī)的實(shí)際位置,使其與目標(biāo)位置相匹配。
2023-05-06 10:08:212 伺服控制器故障處理資料
2023-05-05 22:54:06
步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號的電子產(chǎn)品,它發(fā)出的信號進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)
所需要的強(qiáng)電流信號,帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)
2023-05-05 14:16:034 驅(qū)動(dòng)器有如下幾個(gè)端口:X1、X2、X3、X4、X5、X6、XA、XBX1 X2 X3 X4 X5 X6伺服電機(jī)的四種控制模式:1.位置控制模式 2.速度控制模式 3.轉(zhuǎn)矩控制模式4.全閉環(huán)控制模式 PR
2023-05-05 11:36:140 FOC控制通常會(huì)涉及到PID控制算法和變頻器(或驅(qū)動(dòng)器)控制器。PID控制算法通過調(diào)整電機(jī)的磁場方向和大小來實(shí)現(xiàn)對電機(jī)的控制,變頻器則用于將電源電壓轉(zhuǎn)換成可變的電機(jī)電壓和頻率,從而對電機(jī)進(jìn)行控制。
2023-05-02 09:53:005524 控制器的組成部件 控制器由程序計(jì)數(shù)器、指令寄存器、指令譯碼器、時(shí)序產(chǎn)生器和操作控制器組成。 控制器分組合邏輯控制器和微程序控制器,兩種控制器各有長處和短處。組合邏輯控制器設(shè)計(jì)麻煩,結(jié)構(gòu)復(fù)雜,一旦
2023-04-28 11:10:113460 在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的伺服控制,其實(shí)就是對伺服電機(jī)的位置控制。 其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-04-27 17:34:351113 
交流伺服電機(jī)的性能要好一些,因?yàn)榻涣?b class="flag-6" style="color: red">伺服是正弦波控制,轉(zhuǎn)矩脈動(dòng)小;而無刷直流伺服是梯形波控制。但無刷直流伺服實(shí)現(xiàn)控制比較簡單,便宜。
2023-04-26 10:27:00832 編碼器安裝在伺服電機(jī)上,與電機(jī)同步旋轉(zhuǎn),轉(zhuǎn)動(dòng)的同時(shí)將編碼信號送回控制器,控制器據(jù)以判斷伺服電機(jī)的轉(zhuǎn)向、轉(zhuǎn)速、位置信息。伺服系統(tǒng)按照執(zhí)行元件的不同可分為液壓伺服系統(tǒng)、電氣伺服系統(tǒng)以及氣動(dòng)伺服系統(tǒng),目前應(yīng)用最為廣泛的是電氣伺服系統(tǒng)。
2023-04-24 16:11:02235 
電力傳動(dòng)是指利用電能來控制、驅(qū)動(dòng)機(jī)械傳動(dòng)裝置,實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)的技術(shù)方法。其原理是將電能轉(zhuǎn)化為機(jī)械能,通過運(yùn)動(dòng)控制器,輸出給電機(jī),再由電機(jī)驅(qū)動(dòng)傳動(dòng)裝置(如齒輪、聯(lián)軸器、皮帶)將機(jī)械能轉(zhuǎn)移和擴(kuò)散到需要的位置或設(shè)備上,以實(shí)現(xiàn)生產(chǎn)或生活中機(jī)械或裝置的運(yùn)轉(zhuǎn)或運(yùn)動(dòng),完成相應(yīng)的任務(wù)。
2023-04-20 17:32:582437 伺服驅(qū)動(dòng)器(servo drives)又稱為"伺服控制器"、"伺服放大器",是用來控制伺服電機(jī)的一種控制器,其作用類似于變頻器作用于普通交流馬達(dá),屬于伺服
2023-04-13 16:48:511316 如果PLC在一分鐘內(nèi)發(fā)送10000個(gè)脈沖,那么伺服電機(jī)就以1r/min的速度走完一圈,如果在一秒鐘內(nèi)發(fā)送10000個(gè)脈沖,那么伺服電機(jī)就以60r/min的速度走完一圈。
2023-04-08 10:18:551361 器用于提升、傾斜、拉動(dòng)或推動(dòng)物體(圖 2)。我們這里使用的微型線性執(zhí)行器由驅(qū)動(dòng)部分的直流伺服電機(jī)和位置傳感部分的電位器組成。 對于該裝置,PID 控制器板需要輸出 12V PWM 信號來控制電機(jī)速度
2023-04-04 15:11:34
伺服電動(dòng)機(jī)分為直流伺服電機(jī)和交流伺服電機(jī)。直流伺服電機(jī)比較便宜,交流伺服電機(jī)比較常用。
2023-04-04 15:05:451421 JMDM-20DIOMBADD串口控制 2 路步進(jìn)伺服電機(jī)高速運(yùn)動(dòng)系統(tǒng)是深圳市精敏數(shù)字機(jī)器有限公 司自主研發(fā)的一種主要由電腦和工業(yè)級高可靠步
進(jìn)電機(jī)串口控制器實(shí)現(xiàn)的串口控制 2 路步進(jìn)
2023-04-03 15:09:060 不會(huì)涉及到大部分內(nèi)容。 Arduino開發(fā)板控制BLDC電機(jī)的連接原理圖 BLDC電機(jī)與Arduino開發(fā)板的連接非常簡單。 ESC需要一個(gè)最小12V/5A的電源。 在本篇文章中,我使用的是RPS
2023-03-31 14:48:40
PLC步進(jìn)電機(jī)指令可以控制伺服電機(jī)么? 也就是步進(jìn)電機(jī)指令和伺服電機(jī)指令有區(qū)別嗎?
2023-03-30 17:34:11
PLC步進(jìn)電機(jī)指令可以控制伺服電機(jī)么? 也就是步進(jìn)電機(jī)指令和伺服電機(jī)指令有區(qū)別嗎?
2023-03-30 17:34:10
1200PLC控制伺服電機(jī)沒有原點(diǎn)傳感器可以回零嗎?
2023-03-30 16:40:53
伺服電機(jī)配合伺服控制器精確控制電機(jī)軸的角位置、速度和加速度。這是通過帶有解析器(與控制器的模擬通信)或絕對或增量編碼器(與控制器的數(shù)字通信)的閉環(huán)反饋系統(tǒng)來實(shí)現(xiàn)的,它提供軸的位置信息和速度。
2023-03-25 17:16:441787 2023-2024年,以機(jī)器人核心零部件產(chǎn)品為主要技術(shù)研發(fā)路線,產(chǎn)品包括標(biāo)準(zhǔn)伺服電機(jī)、協(xié)作伺服電機(jī)、人形機(jī)器人伺服電機(jī)以及伺服電機(jī)配套產(chǎn)品,實(shí)現(xiàn)產(chǎn)業(yè)化生產(chǎn)以及產(chǎn)品的國產(chǎn)化替代。
2023-03-23 14:45:45475 本人最近在做項(xiàng)目當(dāng)中,涉及到利用PWM對伺服電機(jī)(servo motor)和步進(jìn)電機(jī)(step motor)的控制。分享下所寫的代碼,以及遇到的問題,希望可以幫到大家。
PWM信號:網(wǎng)上已經(jīng)有很多
2023-03-23 13:51:540 分時(shí)供電的,多相時(shí)序控制電流,用這種電流為
步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
2023-03-23 11:07:324
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論