,它可以通過控制電流脈沖的數量和頻率來精確控制電機的旋轉角度和速度。 那么,步進伺服電機出現失步現象的原因有哪些呢? 1、電源問題:電源不穩定或者電壓波動過大,步進伺服電機可能會受到干擾,都可能導致步進伺服電機出
2024-03-19 08:44:18 24
24 
步進伺服電機出現失步現象的原因可能有多種,主要包括但不限于以下幾點
2024-03-18 11:02:04218 常見的問題及維護方法,幫助讀者更好地使用步進電機。 ? ? ? 一、步進電機常見問題 ? ? ? 1. 步進電機運轉不正常 ? ? ? 步進電機運轉不正常可能是由于驅動器參數設置不當、電機與驅動器連接不良、電機本身故障等原因引起的。為了解
2024-03-17 08:36:1032 
我用5.2的庫生成的FOC程序對電機進行控制,上電后通過workbench 控制電機,正常啟動電機后,串口會失聯,電機還保持著失聯前的狀態轉動
2024-03-15 06:37:12
簡析電氣火災的原因及其對策 張穎姣 安科瑞電氣股份有限公司?上海嘉定201801 摘要:隨著人們生活水平的提高,電氣已成為日常生活及生產作業中必不可少的能源。電給人們帶來便利的同時,也存在著一定
2024-03-12 10:18:5046 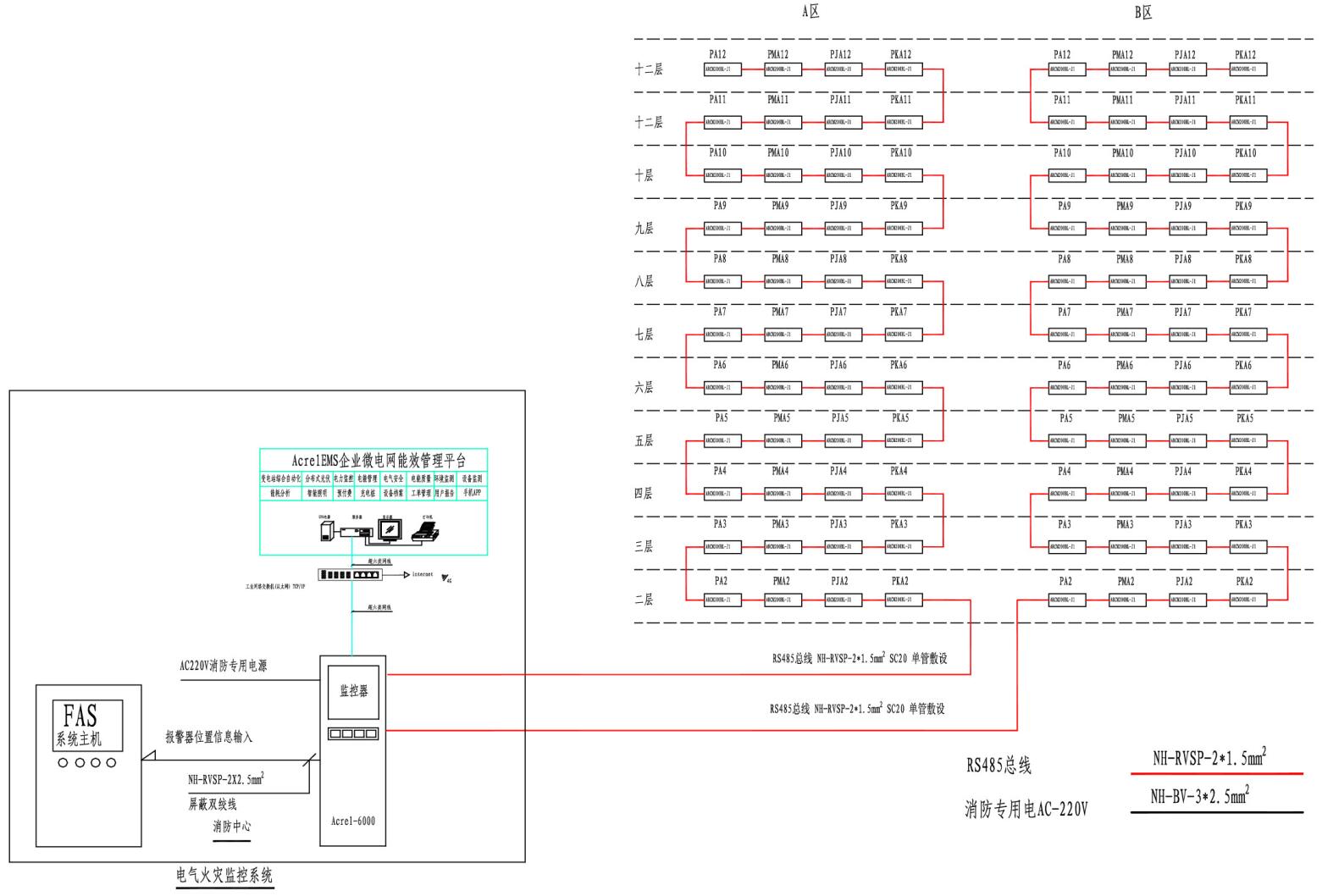
和穩定性。
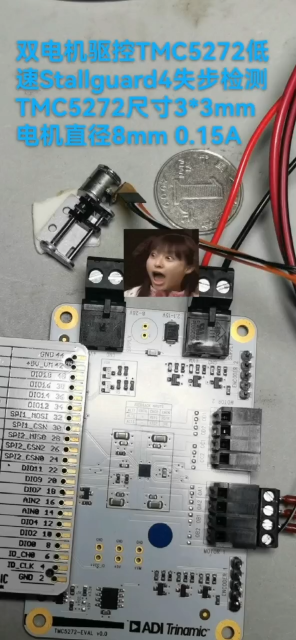
失步檢測與保護:模塊具備Stallguard4失步檢測專利技術,能夠實時監測步進電機的運行狀態,一旦發現失步現象,立即采取相應的保護措施,防止設備損壞。
節能與靜音:TMCM-1290采用
2024-03-10 20:44:08
什么是步進電機的細分控制?步進電機為什么要細分,如何細分? 步進電機的細分控制是一種控制技術,通過對電機驅動信號的細分來實現提高電機精度和減小振動、噪音的目的。步進電機是一種常用的電機類型,它通過
2024-02-18 09:39:32687 影響系統的穩定性和控制精度,因此有必要對步進電機丟步的原因進行分析,并提出相應的解決方法。 步進電機丟步的原因主要有以下幾個方面: 1. 負載過重:步進電機在正常運行時需要克服一定的負載,但如果負載過重,超過了步
2024-02-01 16:32:47690 步進電機驅動電路原理是指通過特定的電信號驅動步進電機工作的原理。而步進電機驅動器是將驅動電路封裝成一個整體,便于直接使用和連接的設備。在本文中,我將詳細介紹步進電機驅動電路原理。 一、步進電機驅動
2024-01-24 10:46:14480 步進電機控制方法 步進電機是一種將電信號轉化為機械轉動的電動機,其輸出轉角是按照電脈沖控制信號的變化而變化的。步進電機的控制方法有幾種常見的方式,包括全步進控制、半步進控制和微步進控制。 全步進控制
2024-01-22 17:18:18313 步進電機是一種電動機的類型,它以準確的固定角度步進方式運轉。步進電機內部包含電磁鐵和旋轉式永磁轉子,通過電流的變化控制電磁鐵的磁場強度,從而產生扭矩,驅動轉子旋轉。步進電機通常用于需要準確位置控制
2024-01-22 10:15:59204 步進電機是一種可以實現精確的位置控制的驅動器。它通過交替通電和斷電的方式來控制電機的旋轉角度和速度。步進電機通常由一個旋轉部分(轉子)和一個靜止部分(定子)組成。整個系統由電源、控制器和電機
2024-01-18 11:02:45686 步進電機驅動器是一種常見的電機驅動裝置,可用于控制步進電機的轉動。調整步進電機驅動器的撥碼開關可以改變其工作模式和參數設置,以滿足不同的應用需求。下面是一個詳細解釋如何調整步進電機驅動器撥碼開關
2024-01-15 13:56:45730 什么是波峰焊?波峰焊接缺陷原因分析及對策
2024-01-15 10:07:06185 
隨著物聯網的不斷發展,電機控制技術得到了廣泛應用,其中步進電機作為一種常見的電機類型,在各行各業中得到了廣泛應用。而作為一種強大、靈活的開源電子平臺,Arduino不僅能夠滿足普通電機的控制需求
2024-01-14 16:37:37671 用300控制三臺110步進電機,電機180轉以上的時候振動不明顯,但到90到150轉時振動比較大。
1、可能是90和150是電機的共振區?
2、網上說加個減速器或者加大驅動器細分可以避免這個共振區
2024-01-10 08:06:26
如何解決步進電機發熱 步進電機最有意義的一個優點就是在開環系統里可以實現精確的控制,因為只需要跟蹤輸入的步進脈沖就可以知道(轉子)的位置,但是步進電機也容易出現發熱的問題,那么遇到這種情況
2024-01-09 08:36:31132 
環電勢差產生電流。這種現象會導致電機系統的損耗和不良后果。本文將從各種角度分析電機軸電流產生的原因,并提出相應的對策,以減少軸電流對電機的影響。 一、電機軸電流產生的原因 1. 磁場不均勻性 電機中的磁場是由定子與轉子之
2023-12-25 11:47:11766 ? ? ? 步進電機主要根據相數來進行分類,其中二相和五相步進電機是目前市場上廣泛采用的。二相步進電機每轉最大可細分為400等分,而五相步進電機則可以細分為1000等分。因此,五相步進電機在控制精度
2023-12-22 08:40:32362 1、勵磁系統原因分析:
針對同步電動機起動運行過程中發生異常聲響、電機定子繞組過熱、起動繞組籠條開焊、斷裂等諸多現象,在排除電機質量原因引起事故的條件下,有必要對現行的勵磁系統進行合理的分析
2023-12-19 06:39:34
了一種以最少參數確定一條圓弧軌跡的插補方法和步進電機變頻調速的方法。步進電機控制系統的開發采用了軟硬件協同仿真的方法 可以有效地減少系統開發的周期和成本。最后給出了步進電機控制系統的應用實例。
2023-12-18 09:24:24 1
1 步進電機相電流的測量是一項涉及電子和機械技術的重要工作,主要用于確保電機正常運轉、故障診斷和優化電機性能。下面將為您提供一篇詳盡、詳實、細致的關于步進電機相電流測量的文章。 一、步進電機相電流測量
2023-12-13 15:47:241063 產生電機抖動原因是什么?有沒有對策呢?
2023-12-12 06:00:34
電子發燒友網站提供《什么是步進電機?步進電機分哪幾種?.pdf》資料免費下載
2023-11-28 14:21:291 在常規的步進電機驅動方案中為了發揮步進電機的較大力矩,不得不將驅動器的輸出電流設置的比較大,如此一來會導致步進電機發熱,永磁體退磁,進而導致丟步。控制發熱量 就需要控制電流,傳統控制電流的方式需要
2023-11-25 11:32:54
電機是uln2003驅動板//使用arduino IDE自帶的Stepper.h庫文件#include // 這里設置步進電機旋轉一圈是多少步#define STEPS 100//設置步進電機的步數
2023-11-10 08:15:41
。初始分析是對的,即保險一再熔斷,驅動器肯定存在某一不正常的大電流,并檢查出一功率管損壞。但對該管的作用沒有弄清楚。實際上該管為步進電機電源驅動管,步進電機為高壓起動,因而要承受高壓大電流。靜態檢查
2023-11-09 07:50:35
為什么用步進電機來畫畫呢?
因為步進電機的旋轉能精確到1.8°之差,能旋轉到特定的角度
正因為這個特性,用步進電機來畫畫就很準確,不僅如此,在自動化設備中大部分采用的也是步進電機
2023-11-03 10:02:19123 
步進電機:** 步進電機是一種將電脈沖信號轉換成相應角位移或線位移的電動機。
2023-11-02 09:35:541218 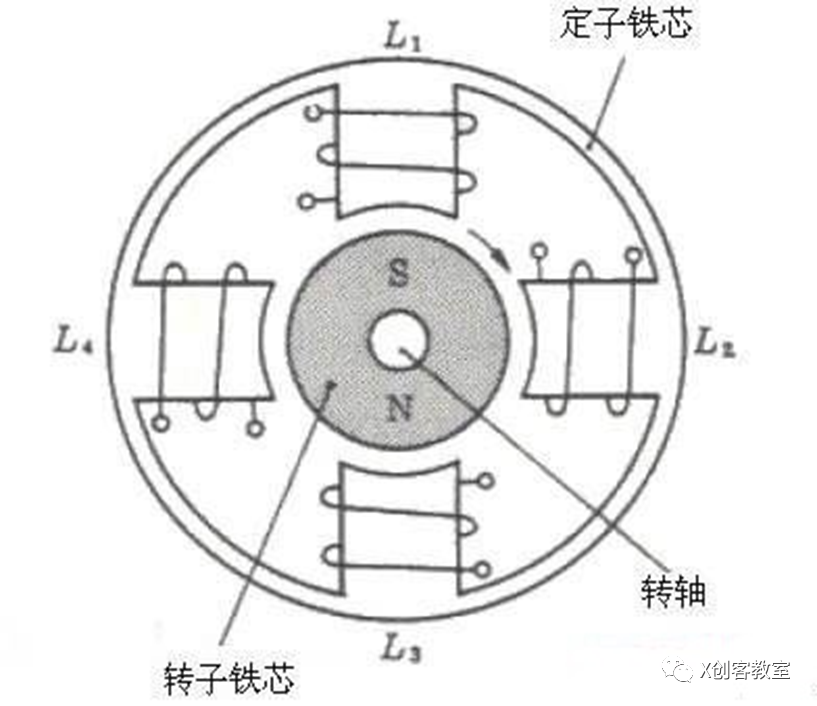
和噪聲困擾的難題,Spreadcycle高速度高動態電流控制,解決常規步進電機高速容易堵轉,高速上不去的問題。TMC5272和TMC5271還帶有不需要編碼器情況下編碼失步,其中Stallguard
2023-10-22 11:41:32
然后步進電機驅動器將程序轉為一系列脈沖信號來控制步進電機轉動。
2023-10-18 10:24:15569 
用51單片機通過ULN2803驅動步進電機,步進電機只有振動,振動的同時我用手給一個轉的力才會轉動, 會不會是步進電機壞了,而且步進電機震動起來很燙手,溫度很高
2023-10-17 07:26:17
發熱是步進電機的一個普遍現象,但怎樣的發熱程度才算正常,以及如何盡量減小步進電機發熱呢?以下是簡單的分析。1、步進電機發熱的原因1.步進電機為什么會發熱對于各種步進電機而言,內部都是由鐵芯和繞組線圈
2023-10-16 08:07:42703 
42步進電機常用有哪些驅動模塊,各有什么差異
2023-10-15 11:03:11
通常什么原因會導致步進電機丟步
2023-10-13 08:20:22
應該怎么檢測步進電機的丟步情況
2023-10-13 06:47:02
步進電機在控制的過程中怎么防止丟步
2023-10-12 08:07:53
是什么原因導致步進電機出現丟步
2023-10-10 06:22:47
圖中每個箭頭間隔是步進電機的一個步進角,每輸入一個脈沖,電機就會轉動一個步進角,不同的電機轉動的步進角是不一樣的。
2023-10-09 11:49:51506 
為什么步進電機改變運動方向就容易出現丟步的情況
2023-10-09 08:17:25
步進電機丟步后怎么對這個丟步的脈沖進行補償
2023-10-09 07:27:53
步進電機怎么精確控制轉角,細分以后怎么計算步距角?直接計算脈沖的個數和頻率嗎?
2023-09-27 07:35:36
各位大佬好,細節是這樣的。
想用Arduino驅動42步進電機做一個直線滑軌來拉伸一個應變電阻,然后再用另外一塊Arduino通過分壓來測量應變電阻的變化,
目前遇到的問題是步進電機上電后會給電阻
2023-09-26 07:59:00
1.步進電機配減速機的原因步進電機切換定子相電流的頻率,如改變步進電機驅動電路的輸入脈沖,使其變成低速運動。低速步進電機在等待步進指令時,轉子處于停止狀態,在低速步進時,速度波動會很大,此時如改為
2023-09-25 08:08:49863 STM32控制TMC5160步進電機控制驅動芯片的代碼
2023-09-22 07:31:40
大部分電子線路板廠家在使用錫膏進行焊接時,或多或少會遇到一些問題。例如,虛焊、假焊、錫珠、拉尖、發黃、發黑等等,這些問題困擾著不少人,今天佳金源錫膏廠家就來和大家著重聊一下錫膏發黃發黑的原因以及對策
2023-08-29 17:12:481835 
步進電機是一種可以與脈沖信號同步準確地控制旋轉角度和轉速的電機,步進電機的也稱為“脈沖電機”。由于步進電機無需使用位置傳感器僅通過開環控制即可實現準確的定位而被廣泛用于需要定位的設備中。步進電機
2023-08-29 08:08:451348 變頻電機振動原因分析? 變頻電機振動是一種常見的故障現象,往往會造成設備的不穩定性和降低設備的使用壽命。因此,對于變頻電機振動的原因進行分析和解決是非常必要的。本文將從以下幾個方面對變頻電機振動
2023-08-28 17:43:091573 的原理不同,尤其是電感器的嘯叫,其原因多種多樣,十分復雜。本文中將就DC-DC轉換器等電源電路的主要元件——功率電感器的嘯叫原因以及有效對策進行介紹。 目錄 功率電感器嘯叫原因 功率電感器主體振動以及噪音擴大的機制 功率電感器的嘯叫
2023-08-21 17:08:48561 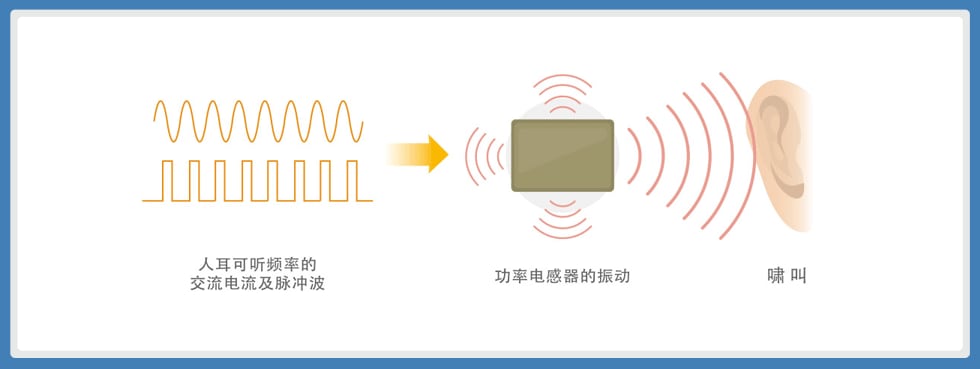
在如今這個智能時代,步進電機因其特有的開環位置控制性能而被廣泛應用。各設備在步進電機轉動的過程中,對它輸出力矩的平滑性有一定的要求。轉動的穩定性除了和步進電機的本體結構有關,也和步進電機的控制方式
2023-08-21 11:31:17718 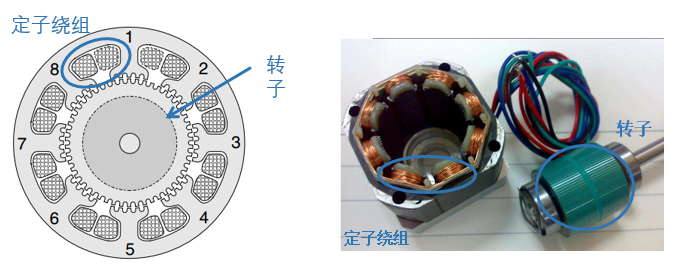
先來看一下硬件原理圖,可看到控制步進電機的管腳分別為:GPIO6[2]、GPIO6[3]、GPIO6[4]和GPIO1[15]。使用的是一路四相五線步進電機,使用的電機驅動芯片是L9110。
2023-08-04 14:45:412078 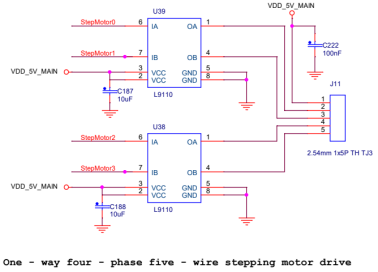
選擇步進電機時首先要考慮各種步進電機的優缺點,根據設備的具體要求選擇合適的電機。在這里先介紹不同相數的步進電機的優缺點:
2023-07-21 17:27:11435 步進電機和伺服電機的性能差異源自他們不同的電機設計方案。步進電機的極數比伺服電機多得多,因此步進電機旋轉一整圈,所需的繞組電流交換次數要多得多,從而導致在速度增加的情況下,其轉矩迅速下降。
2023-07-13 10:53:45749 
和異物粘附等問題更引人關注。為了避免這些問題,只能全力實施各種對策。以下介紹具體對策的一些示例。 防止制造工序中產生次品的靜電對策 帶電即靜電的一個眾所周知的原因是由物體或人在運動時的摩擦而產生的帶電(摩擦帶電)。這
2023-06-28 17:38:43599 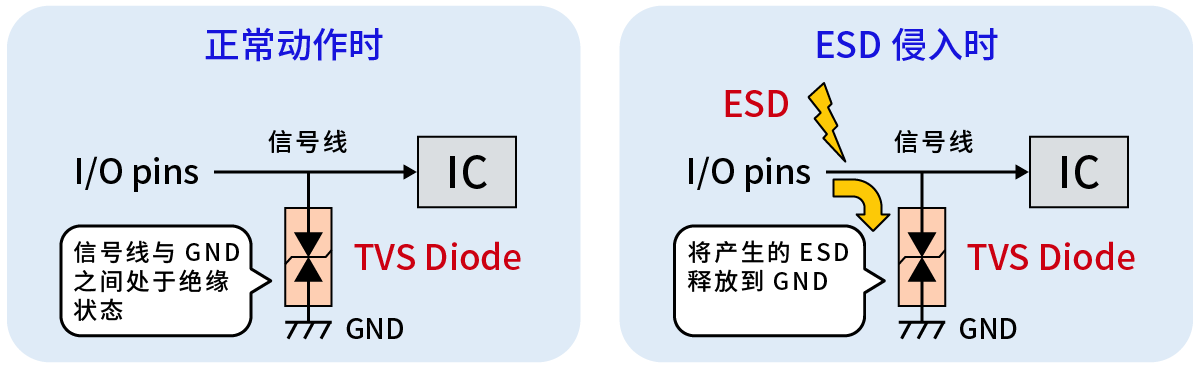
請問有NUVOTON關于DRV8833步進電機的例程嗎?
2023-06-27 08:39:53
BGA失效分析與改善對策
2023-06-26 10:47:41438 
運動誤差基本類型原因與對策
2023-06-20 15:58:420 步進伺服和步進電機都是一種設備,但它們的工作原理和控制方式有所不同。 步進電機是一種常見的電動機,其工作原理是通過交替通電使電機轉子按照一定的步距旋轉。步進電機通常采用開環控制方式,即根據輸入的脈沖
2023-06-13 08:30:02492 我們選購步進電機時,經常會看到這種字樣,即這個步進電機是幾相的,這個相是什么意思呢? 所謂的相,就是電機內部定子有幾對通電繞組。以最為常見的兩相步進電機來說,它的內部有四個通電繞組,即兩對,那就
2023-06-01 19:55:022487 的發生嘯叫的原理不同,尤其是電感器的嘯叫,其原因多種多樣,十分復雜。 ? ? 本文中將就DC-DC轉換器等電源電路的主要元件——功率電感器的嘯叫原因以及有效對策進行介紹。 ? 01 . 功率電感器嘯叫原因 ? 1. 間歇工作、頻率可變模式、負荷變動等可能
2023-05-24 16:37:263327 
首先,步進電機每轉步數與步進角的存在一定的關系。這些參數值可以從我們的步進電機篩選條件進行篩選。
2023-05-11 09:42:31498 
步進電機接收低到高電平走一步,如果是從高到低呢?也會轉一步嗎?
2023-05-10 15:07:47
步進電機控制器是一種能夠發出均勻脈沖信號的電子產品,它發出的信號進入步進電機驅動器后,會由驅動器轉換成步進電機
所需要的強電流信號,帶動步進電機運轉。步進電機控制器能夠準確的控制步進電機轉過每一個
2023-05-05 14:16:034 步進電機是一種特殊的電機,它的轉動是以固定的步進角度為單位進行的。步進電機具有精度高、響應速度快、控制方便等優點,因此在許多領域得到了廣泛的應用。本文將介紹步進電機的主要應用領域。
2023-05-02 16:20:002312 選擇步進電機時首先要考慮各種步進電機的優缺點,根據設備的具體要求選擇合適的電機。在這里先介紹不同相數的步進電機的優缺點:??一、兩相PM型步進電機??1、優點:??(1)便宜。一般比同等大小的HB
2023-04-28 09:53:44407 觀察分析出現該現象的原因,由此找出解決之道!步進電機的丟步及定位不準,一般由以下幾方面原因引起:1、 改變方向時丟脈沖,表現為往任何一個方向都準,但一改變方向就累計偏差,并且次數越多偏得越多;2、 啟動
2023-04-15 16:33:58
在一些自動控制領域中,步進電機的使用仍占著相當大的比例,步進電機與驅動電路組成的開環數控系統,因其簡單的結構、低廉的價格和可靠的性能,目前已在很多行業中(工業自動化、醫療自動化、紡織自動化等)廣泛應用。步進電機經常被用于精確定位的場合,因而保證電機不發生失步至關重要。
2023-04-15 16:33:4412489 
決?6)如何降低步進電機驅動芯片的發熱量?7)如何在開環情況下檢測步進電機的力矩,避免步進電路失步?8)在使用TMC5130TMC2209TMC2208 TMC225時候高速堵轉,如何解
2023-04-15 11:17:28
BGA失效分析與改善對策
2023-04-11 10:55:48577 反應式步進電機和永磁式步進電機都是常見的步進電機類型,它們的區別主要在于其工作原理和結構。
反應式步進電機是利用異步電機的原理,將定子繞組分為兩個或以上繞組,同時用電子器件(如晶閘管)控制
2023-03-27 16:11:141506 步進電機控制器是一種專門用于控制步進電機的設備,可以用來控制步進電機的轉速和方向。步進電機控制器通常包括一個驅動電路板和一個控制板,驅動電路板用于提供電源和輸出脈沖信號,控制板則用于控制步進電機的運行。
步進電機控制器的應用設置一般包括以下幾個方面:
2023-03-26 22:30:201182 一個線圈的單相步進電機。雖說單相,實為一個線圈產生的磁通方向交互反轉而驅動轉子轉動。實用的步進電機的相數有單相、兩相、三相、四
相、五相。
現在使用的步進電機大部分用永磁轉子。普遍使用水久磁鐵的原因是效率高,分辨
2023-03-24 11:16:5736 一文帶你了解步進電機的相關知識:相、線、極性和步進方式 原文鏈接:這里不說步進電機的 “細分” 實驗,只說一下有關步進電機的基礎概念以及步進電機的三種工作方式——單拍、雙拍、單雙拍,現在步進電機
2023-03-24 11:04:023 請教一下大神伺服電機失步時是怎樣得到補償的?
2023-03-23 15:34:44
) 普通57兩相步進電機 ???????? 硬件接線EDS文件常規設置撥碼設置步進驅動器地址為3,波特率為500k,終端電阻有效。 在TwinCAT3 EL6751模塊下添加 SSD2608PC 驅動器
2023-03-23 14:21:500 步進電機和伺服電機哪個好,這個沒有絕對的答案,適合的才是最好的!下面從步進電機和伺服電機各種的優缺點、性能特點
進行分析:
步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成
2023-03-23 11:07:324 步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為
步進電機供電,步進電機才能正常工作,驅動器就是為步進電機分時供電的。雖然步進電機已被
2023-03-23 10:50:161 步進電機具有快速啟動、精確定位和直接將數字量轉化為角度量的優點,是工業傳動和工業定
位系統主要元件之一,當然肯定是還有比步進電機更好的電機,不過因為步進電機價格的原因會有很多手工達人會選擇步進
2023-03-23 10:49:251 知識點: 樹莓派GPIO控制步進電機的正轉一定角度和反轉一定角度 下面是我用的步進電機:
步進電機28BYJ-48名稱含義: 28:表示步進電機的有效最大外徑為28毫米 B:表示步進電機
2023-03-23 10:29:230 步進電機基礎(2.6)-直線步進電機 前言 基本信息 公式 前言說明 直線步進電機 前言 基本信息 名稱 描述說明 教材名稱 步進電機應用技術 作者 坂本正文 譯者 王自強公式 θs = 180
2023-03-23 09:30:391
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論