? ? ? 變頻器是一種電力調(diào)節(jié)設(shè)備,它通過改變電機(jī)的工作頻率來調(diào)節(jié)電機(jī)的轉(zhuǎn)速。在實(shí)際應(yīng)用中,變頻器通常采用三種控制方式:開環(huán)控制、閉環(huán)控制和矢量控制。這三種控制方式各有優(yōu)缺點(diǎn),下面將詳細(xì)介紹它們
2023-12-18 09:56:46 408
408 
伺服電機(jī)是否必須有對應(yīng)的伺服驅(qū)動(dòng)器來控制?沒有伺服驅(qū)動(dòng)器能使用伺服電機(jī)嗎?怎么控制?首次接觸,不懂
2023-12-15 07:49:19
上一回我們簡單聊了步進(jìn)馬達(dá)里面的結(jié)構(gòu),以及它為什么可以用小角度一步一步轉(zhuǎn)動(dòng)的原理,另外也介紹了兩相式步進(jìn)馬達(dá)常見的兩種接線方式。
2023-12-14 15:45:47612 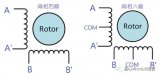
伺服電機(jī)(servo motor )是指在
伺服系統(tǒng)中
控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助
馬達(dá)間接變速裝置。根據(jù)使用電源不同:分直流
伺服電機(jī)和交流
伺服電機(jī)。他兩在功能上的區(qū)別:交流
伺服要好一些,因?yàn)?/div>
2023-12-11 17:14:52230 ?NY8A053E是一款高性能的微控制器MCU單片機(jī),它提供了三種封裝類型,包括QFP64、QFP100和QFN100。這些封裝類型使得NY8A053E適用于各種不同的應(yīng)用場景,包括工業(yè)控制
2023-11-27 21:45:44
DD馬達(dá)和伺服電機(jī)是兩種常見的電機(jī)類型,它們在許多方面都有所不同。下面將詳細(xì)介紹它們的區(qū)別。 一、定義和結(jié)構(gòu) DD馬達(dá),全稱為DD馬達(dá)驅(qū)動(dòng)器,是一種通過控制器來實(shí)現(xiàn)直流電機(jī)正反轉(zhuǎn)的設(shè)備。它主要由電機(jī)
2023-11-24 14:17:482543 目前做的方案是伺服電機(jī)方案,但是成本有點(diǎn)高,想改成變頻器+普通三相異步電動(dòng)機(jī)控制。
不知道可不可行。
大家可否給一點(diǎn)建議。伺服模鍛壓力機(jī)不知道有沒有干過的。
2023-11-21 06:03:42
電子發(fā)燒友網(wǎng)站提供《三極管的偏置電壓和三種連接方式.zip》資料免費(fèi)下載
2023-11-20 14:44:06 0
0 伺服電機(jī)控制器的類型包括降壓起動(dòng)器、調(diào)速驅(qū)動(dòng)器、智能控制器等三種分類,另外控制方面主要以方波控制、正弦波控制等兩種方式,那么下面就詳細(xì)介紹一下相關(guān)內(nèi)容。
2023-11-19 10:00:29252 伺服電機(jī)控制器的類型包括降壓起動(dòng)器、調(diào)速驅(qū)動(dòng)器、智能控制器等三種分類,另外控制方面主要以方波控制、正弦波控制等兩種方式。
2023-11-16 10:26:16269 智能物聯(lián)網(wǎng)時(shí)代里信息存儲(chǔ)、處理和傳輸方式的變化淺談
2023-11-10 17:51:02266 為Cache地址,這個(gè)變換過程叫作地址變換。 地址映像方式通常采用直接映像、全相聯(lián)映像、組相聯(lián)映像三種: 1-直接映像 每個(gè)主存地址映像到Cache中的一個(gè)指定地址的方式,稱為直接映像方式。在直接映像方式下,主存中存儲(chǔ)單元的數(shù)據(jù)只可調(diào)入Cache中的一個(gè)位置,如
2023-10-31 11:39:09415 PWM信號(hào)輸出的三種硬件驅(qū)動(dòng)方式 PWM信號(hào),即脈沖寬度調(diào)制信號(hào),用于控制電子設(shè)備的運(yùn)轉(zhuǎn)。在電路控制領(lǐng)域中,PWM信號(hào)是非常重要的信號(hào)之一,它通常用于控制電機(jī)、LED燈、音頻放大器等設(shè)備的運(yùn)轉(zhuǎn)
2023-10-30 09:47:03595 伺服控制1、交流伺服電機(jī)的工作原理伺服電機(jī)內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動(dòng)器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動(dòng),同時(shí)電機(jī)自帶的編碼器反饋信號(hào)給驅(qū)動(dòng)器,驅(qū)動(dòng)器根據(jù)反饋值與目標(biāo)值進(jìn)行比較
2023-10-27 08:07:40462 
伺服電機(jī)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)可以控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對象。
2023-10-24 11:28:14144 
通過總線控制伺服電機(jī)時(shí),如何進(jìn)行回零(尋參考點(diǎn))控制?這里就CANOPEN伺服電機(jī)的回零控制方法分享給大家。
2023-10-23 11:42:201627 
快充的三種實(shí)現(xiàn)方式是什么?快充對電池的損害程度大嗎? 快充技術(shù)在近年來隨著移動(dòng)設(shè)備的普及而得到廣泛應(yīng)用。傳統(tǒng)的充電方式需要幾個(gè)小時(shí)才能完成,但是快充技術(shù)大大縮短了充電時(shí)間。這種技術(shù)被廣泛應(yīng)用于手機(jī)
2023-10-22 15:08:27607 伺服電機(jī)(servo motor )是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。
2023-10-20 11:41:54325 
是通過位置、速度和力矩三種方式對伺服電機(jī)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位,是傳動(dòng)技術(shù)的高端產(chǎn)品。主流的伺服驅(qū)動(dòng)器均采用數(shù)字信號(hào)處理器(DSP)作為控制核心,可以
2023-10-11 08:07:531081 如何用單片機(jī)讓三極管出現(xiàn)三種不同的電平狀態(tài)?
2023-10-10 06:56:03
伺服驅(qū)動(dòng)器中可以集成多少種電機(jī)驅(qū)動(dòng)控制電路?
2023-10-08 07:07:48
非隔離型開關(guān)電源一般有三種基本工作方式,降壓型、升壓型、極性反轉(zhuǎn)型三種,而其他的都是這三種形式轉(zhuǎn)換而來,例如反激式、正激式、推挽式、半橋式、全橋式。
2023-09-24 11:28:0612062 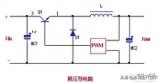
在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-09-08 11:22:48734 在位置模式控制中,伺服電機(jī)通過傳感器獲取自身位置信息和目標(biāo)位置信息,然后計(jì)算出兩者之間的差值,進(jìn)而控制電機(jī)輸出的電流、電壓、轉(zhuǎn)矩或速度,實(shí)現(xiàn)電機(jī)的精準(zhǔn)旋轉(zhuǎn)。在該模式下,伺服電機(jī)的準(zhǔn)確度非常高,可以在微小的角度范圍內(nèi)進(jìn)行控制。
2023-08-26 11:07:134521 降低運(yùn)動(dòng)控制應(yīng)用中可聞噪聲的三種出色方式
2023-08-24 13:37:07284 
在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-08-09 09:25:28599 1、所謂位置環(huán)的“環(huán)”,不是我們說的PID閉環(huán),位置不能像速度大小、電流大小那樣通過調(diào)節(jié)器調(diào)節(jié);
2、電機(jī)轉(zhuǎn)子、運(yùn)動(dòng)體的位置可以用編碼器也可以直接用位置檢測的方法,所以伺服都有直接位置檢測信號(hào)的輸入接口!
3、所謂運(yùn)動(dòng)控制的方式,主要是看運(yùn)動(dòng)體的那個(gè)運(yùn)動(dòng)參數(shù)受到控制:
2023-08-08 11:47:32800 伺服驅(qū)動(dòng)器又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機(jī)的一種控制器,其作用類似于變頻器作用于普通交流馬達(dá),屬于伺服系統(tǒng)的一部分。一般是通過位置、速度和力矩三種方式對伺服電機(jī)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位。
2023-08-08 10:38:194717 
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來控制,位置控制是通過發(fā)脈沖來控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來選擇。
2023-07-28 14:36:19574 
(1)位置控制:在位置控制模式下,控制系統(tǒng)通過控制伺服電機(jī)的位置來實(shí)現(xiàn)精確的定位。通常使用編碼器或其他位置傳感器來反饋電機(jī)的實(shí)際位置,并與目標(biāo)位置進(jìn)行比較,然后調(diào)整電機(jī)的輸出以使其達(dá)到目標(biāo)位置
2023-07-27 08:35:02802 伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場景下,該如何確定選擇伺服電機(jī)控制方式?
2023-07-26 09:22:20976 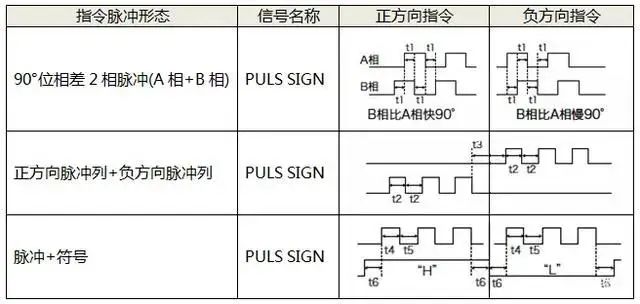
伺服的控制術(shù)語有很多:閉環(huán)控制、半閉環(huán)控制、開環(huán)控制,速度環(huán)、電流環(huán)、位置環(huán),很多朋友相信沒有弄清楚,今天就為大家詳細(xì)解答一下,伺服的控制模式是怎樣的,該怎樣系統(tǒng)的掌握這一塊。
2023-07-23 09:34:04706 
伺服電機(jī)是一種用于精確控制運(yùn)動(dòng)的電機(jī),它在許多自動(dòng)化應(yīng)用中發(fā)揮著關(guān)鍵作用。選擇合適的伺服電機(jī)需要考慮多個(gè)因素,包括但不限于以下幾點(diǎn)。
2023-07-12 10:20:22466 伺服電機(jī)是我們常用的一種電機(jī),在本文的案例中,將學(xué)習(xí)如何使用單片機(jī)控制伺服電機(jī),案例以PIC16F877A單片機(jī)作為接口的連接與控制示例。
2023-07-06 10:53:142779 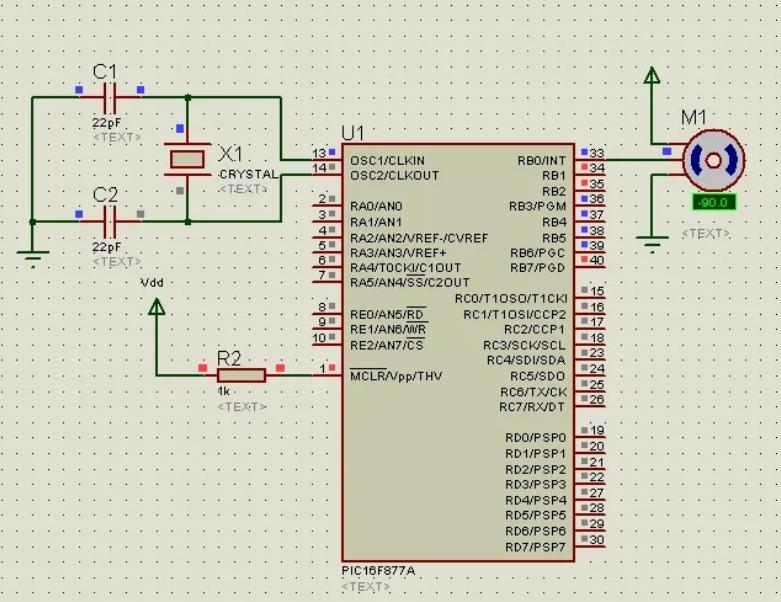
三菱伺服馬達(dá) 1.設(shè)置定位模塊基本參數(shù) 在智能功能模塊中(QD77MS系列)根據(jù)機(jī)械配置不同設(shè)置好相應(yīng)的參數(shù)
2023-06-25 09:21:292382 
作為現(xiàn)代工業(yè)運(yùn)動(dòng)控制的重要組成部分,低壓伺服驅(qū)動(dòng)器通過力矩、速度、位置三種方式對伺服電機(jī)進(jìn)行精準(zhǔn)控制
2023-06-19 16:45:38448 
請教各位達(dá)人有成功用新唐單片機(jī)控制伺服馬達(dá)嗎?如果四路同時(shí)輸出,是否每路脈沖能達(dá)到500K的頻率?
2023-06-19 06:14:25
我看MS51有三種Flash大小的,除了Flash大小不同外,其他配置一樣嗎
2023-06-15 10:15:16
Proteus教程:按鍵的三種控制方式(輪詢、矩陣、中斷)
2023-06-14 11:26:452329 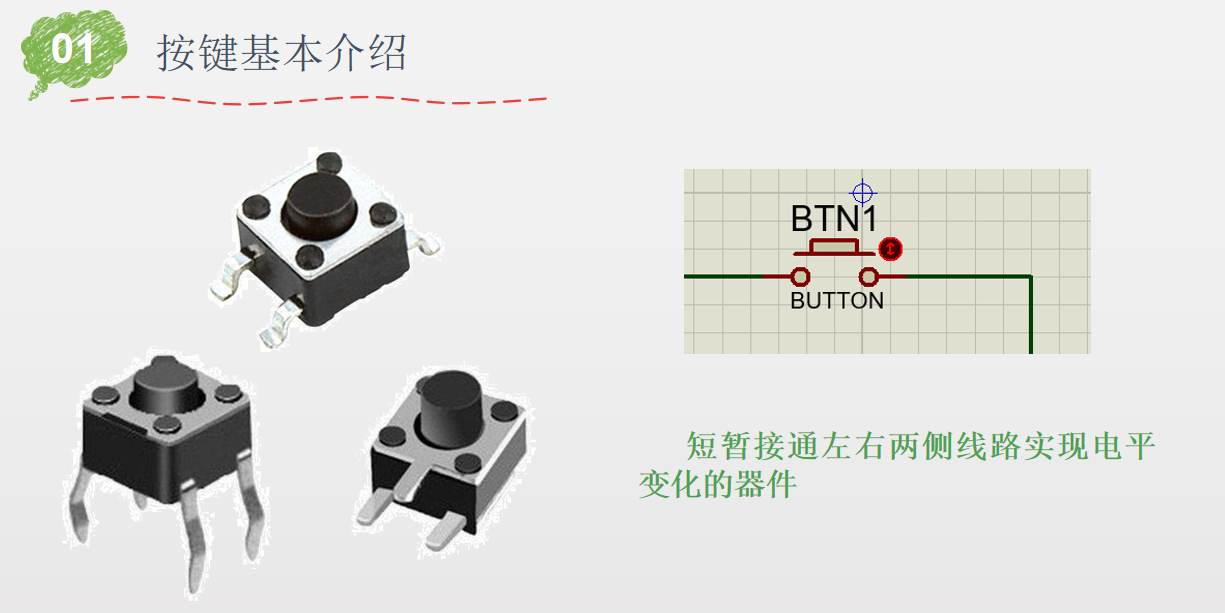
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來控制,位置控制是通過發(fā)脈沖來控制。
2023-05-24 09:44:00635 
伺服驅(qū)動(dòng)器是用來控制伺服電機(jī)的一種控制器,其作用類似于變頻器作用于普通交流馬達(dá),屬于伺服系統(tǒng)的一部分主要應(yīng)用于高精度的定位系統(tǒng)。
2023-05-19 10:40:291635 。一般是通過位置、速度和力矩三種方式對伺服電機(jī)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位,目前是傳動(dòng)技術(shù)的高端產(chǎn)品。
2023-05-18 10:45:25458 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場景下,我們該如何選擇伺服電機(jī)的控制方式呢?
2023-05-16 15:56:152476 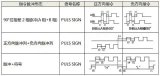
伺服系統(tǒng)指經(jīng)由閉環(huán)控制方式達(dá)到對一個(gè)機(jī)械系統(tǒng)的位置、速度和加速度的控制。
一個(gè)伺服系統(tǒng)的構(gòu)成包括被控對象、執(zhí)行器和控制器(負(fù)載、伺服電動(dòng)機(jī)和功率放大器、控制器和反饋裝置)。
1. 執(zhí)行器的功能
2023-05-16 14:46:430 伺服電機(jī)(servo motor )是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。
2023-05-11 17:30:559787 
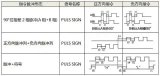
控制器控制伺服電機(jī)通常采用兩種指令方式:數(shù)字脈沖和模擬信號(hào)。數(shù)字脈沖這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號(hào);伺服驅(qū)動(dòng)器工作在位
2023-05-09 14:43:031009 通過模擬量的輸入或脈沖的頻率都可以進(jìn)行轉(zhuǎn)動(dòng)速度的控制,在有上位控制裝置的外環(huán)PID控制時(shí)速度模式也可以進(jìn)行定位,但必須把電機(jī)的位置信號(hào)或直接負(fù)載的位置信號(hào)給上位反饋以做運(yùn)算用。
2023-05-06 14:16:342150 
轉(zhuǎn)矩控制方式是通過外部模擬量的輸入或直接的地址的賦值來設(shè)定電機(jī)軸對外的輸出轉(zhuǎn)矩的大小,具體表現(xiàn)為例如10V對應(yīng)5Nm的話,當(dāng)外部模擬量設(shè)定為5V時(shí)電機(jī)軸輸出為2.5Nm。
2023-05-06 11:33:03211 伺服電機(jī)(servo motor )是指在 伺服系統(tǒng) 中控制 機(jī)械元件 運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。 伺服電機(jī)可以控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為 轉(zhuǎn)矩 和轉(zhuǎn)速以驅(qū)動(dòng)
2023-05-06 11:22:334 運(yùn)動(dòng)控制在實(shí)際的工業(yè)現(xiàn)場中隨處可見,也常聽到大家提到運(yùn)動(dòng)控制;那什么叫運(yùn)動(dòng)控制?以及基本概念有哪些?下面我們?yōu)榇蠹易龊唵蔚慕榻B 運(yùn)動(dòng)控制(MC)是自動(dòng)化的一個(gè)分支,它使用通稱為伺服機(jī)構(gòu)的一些
2023-05-06 10:14:201328 
伺服電機(jī)是一個(gè)閉環(huán)系統(tǒng),它使用位置反饋來控制其運(yùn)動(dòng)和最終位置。伺服電機(jī)有多種類型,其主要特點(diǎn)是能夠精確控制其軸的位置。在工業(yè)型伺服電機(jī)中,位置反饋傳感器通常是高精度編碼器,而在較小的 RC 或業(yè)余
2023-05-06 10:08:212 伺服控制單元,即,經(jīng)由閉環(huán)控制方式達(dá)到一個(gè)機(jī)械系統(tǒng)的位置,扭矩,速度或加速度的控制,是自動(dòng)控制系統(tǒng)中的執(zhí)行單元,是把上位控制
器的電信號(hào)轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出。
1. 控制器:動(dòng)作
2023-05-06 09:34:343 伺服馬達(dá)在驅(qū)動(dòng)時(shí)由于負(fù)載的關(guān)系而產(chǎn)生扭矩的緣故,使得流進(jìn)馬達(dá)的電流增大,一旦流進(jìn)馬達(dá)的電流過大時(shí)會(huì)造成馬達(dá)燒毀的情形。為防止此一情形發(fā)生,在馬達(dá)的輸出位置加入電流感測裝置,當(dāng)馬達(dá)電流超過一定電流時(shí),切斷伺服驅(qū)動(dòng)器以保護(hù)馬達(dá)。
2023-05-04 12:47:041173 
在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的伺服控制,其實(shí)就是對伺服電機(jī)的位置控制。 其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-04-27 17:34:351113 
電壓方式:只需要在控制信號(hào)端加入一定大小的電壓即可,在有些場景甚至使用一個(gè)電位器即可實(shí)現(xiàn)控制,非常的簡單。但選用電壓作為控制信號(hào),在環(huán)境復(fù)雜的場景下,電壓容易被干擾,造成控制不穩(wěn)定。
2023-04-26 10:48:001616 ,有好的靈感以及文章隨筆,歡迎投稿,投稿請標(biāo)明筆名以及相關(guān)文章,投稿接收郵箱:1033788863@qq.com。今天帶來的是“FPGA的三種配置方式”,話不多說,上貨。
FPGA的三種配置方式
2023-04-24 15:34:27
(DDR)、音圈、有刷、無刷伺服電機(jī)的位置、速度、轉(zhuǎn)矩控制。它能以獨(dú)立可編程控制(Stand-alone)、外部控制、或分布式網(wǎng)絡(luò)控制三種模式運(yùn)行,可支持增量編碼器、模
2023-04-20 09:57:49
(DDR)、音圈、有刷、無刷伺服電機(jī)的位置、速度、轉(zhuǎn)矩控制。它能以獨(dú)立可編程控制(Stand-alone)、外部控制、或分布式網(wǎng)絡(luò)控制三種模式運(yùn)行,可支持增量編碼器、模
2023-04-18 17:28:25
EVALKIT-ROBOT-1是一個(gè)隨插即用的馬達(dá)控制解決方案,旨在幫助使用者輕松進(jìn)入伺服驅(qū)動(dòng)器和機(jī)器人精準(zhǔn)定位,以及高階動(dòng)作控制領(lǐng)域。方案中包含一個(gè)內(nèi)建1024脈沖增量編碼器的maxon 100W
2023-04-17 09:59:50889 
淺談電子三防漆對PCB板的作用有哪些?
2023-04-14 14:36:27
系統(tǒng)的一部分,主要應(yīng)用于高精度的系統(tǒng)。一般是通過位置、速度和力矩三種方式對伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng),目前是傳動(dòng)技術(shù)的高端產(chǎn)品。
2023-04-13 16:48:511316 以三菱PLC控制伺服馬達(dá)為例,具體分享一下伺服馬達(dá)控制步驟。
2023-04-11 09:08:382781 通過模擬量的輸入或脈沖的頻率都可以進(jìn)行轉(zhuǎn)動(dòng)速度的控制,在有上位控制裝置的外環(huán)PID控制時(shí)速度模式也可以進(jìn)行定位,但必須把電機(jī)的位置信號(hào)或直接負(fù)載的位置信號(hào)給上位反饋以做運(yùn)算用。
2023-04-10 12:52:06633 西門子M440變頻器段子控制三種停車方式 西門子變頻器有三種停車方式: 自由停車、正常停車和快速停車 區(qū)別如下: OFF1-斜坡停車,減速停車過程按照系統(tǒng)或變頻器定義的斜坡下降時(shí)間制動(dòng),控制端子對應(yīng)
2023-04-10 10:09:212 三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。速度控制和轉(zhuǎn)矩控制都是用模擬量來控制的,位置控制是通過發(fā)脈沖來控制的。如果對電機(jī)的速度、位置都沒有要求,只要輸出一個(gè)恒轉(zhuǎn)矩,當(dāng)然是用轉(zhuǎn)矩模式
2023-04-07 10:42:03728 通過模擬量的輸入或脈沖的頻率都可以進(jìn)行轉(zhuǎn)動(dòng)速度的控制,在有上位控制裝置的外環(huán)PID控制時(shí)速度模式也可以進(jìn)行定位,但必須把電機(jī)的位置信號(hào)或直接負(fù)載的位置信號(hào)給上位反饋以做運(yùn)算用。
2023-04-04 12:38:12923  電子發(fā)燒友App
電子發(fā)燒友App


















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論