 電子發燒友App
電子發燒友App


蓄電池監測裝置的研究
一、基于數字濾波器的內阻測量技術
在線測量每個單電池的內阻是檢測裝置的難題之一,測量準確度直接關系到分析的準確度。在線測量需要解決充電機和用電負載干擾的問題。對于大容量電池,電池內阻是微歐級小信號,本文中采用了數字濾波技術提高測量準確度。
在線測量主要存在以下因素影響測量:
1)? 測量線耦合的高頻干擾信號;
2)? 50Hz工頻干擾;
3)? 充電機低頻紋波;
4)? 充電或放電的電壓緩變;
5)? 負載的不規則變動。
對于高頻干擾,一方面通過硬件低通濾波削減,另一方面,在有效的A/D采樣頻率下進行平滑濾波處理。有效信號組成如圖1-1所示。
本文的研究中設計了專用的激勵裝置,向電池組饋入受控交流信號,測量電路采集被測電池的交流電壓信號。為消除上述影響因素,采用了IIR數字濾波技術。
.
采用直接方式即可實現差分方程運算。圖1-2是采用橢圓濾波器設計的帶通濾波器,M=N=11,具有良好的下降斜率,在通帶和阻帶內均為等紋波。
圖1-1
表1是量程為50mΩ的實測數據,表明該方法具有良好的線性和重復性。
表1 采用IIR濾波器的實測數據(mΩ)
二、監測裝置與充電機互動設計方案
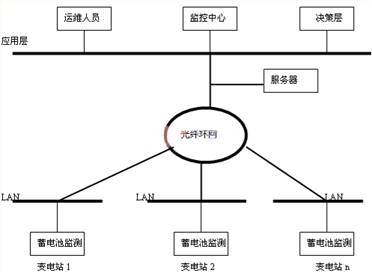
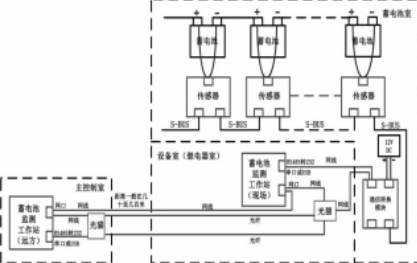
監測裝置與充電機互動方案是提高劣化程度預測準確性的創造性工作模式,其基本結構如圖2-1所示。
互動方案的監測系統結構
浮充狀態下的測量理論和方法有其固有的局限性,放電測試能得到更為可靠的數據,但目前的放電測試或者需要人工干預,或者在不確定的停電發生后被動進行,前者難于經常性的進行,而且風險較大,后者的不確定性也帶來隱患。本文的互動方案是針對先進電源裝置的系統化設計方案,能有效解決前述的多方面問題。
互動方案的主要原理是:電池監測(Battery Monitoring Unit--BMU)進行日常的巡檢,并且分析采集的數據及變化趨勢,在一定條件下請求充電機(Rectifier Unit--RU)配合進行部分放電測試。由于RU在部分放電時設置為一個比蓄電池放電下限電壓低的某一整流輸出值,既能使電池提供用電設備的負荷功率,又避免了放電過程中由于電池問題帶來的停機風險。
?
??? 在正常浮充狀態下,BMU連續檢測電池組的電壓和內阻,若發現電壓或內阻異常,則啟動部分放電測試過程,進行更深一層次的測試。該測試過程也被設置為按一定周期啟動,如一個月。
???
在放電測試期間,將劣化程度預測模型所需的放電數據,采集包括浮充電壓、初始跌落、正常放電電壓等數據,通過電池的劣化程度(SOH)預測模型運算,準確得知SOH。
此外,互動方案并不排斥停電后的被動測試,被動放電也可以觸發進行預測計算,出現放電即觸發數據采集,在放電深度達到某個設定值時啟動一次預測運算。
這樣,在內阻監測的基礎上,監測系統通過采用三類不同深度的放電測試達到長期連續準確檢測SOH的目的:
1) 完全放電 電池在投運之前應進行一次100%深度的放電,以確認該電池組能滿足設計要求。否則,若存在產品本身的質量問題,會影響到后續監測數據處理的準確性,放電前應該充滿并在浮充狀態保持一定的時間。
2) 中等深度的放電 中等深度指30—50%深度的放電。檢測裝置的數據處理方法根據此深度的放電數據可以相當準確地計算各電池的SOH,同時亦避免了更加深度放電過程的突然停電,使設備承受斷電的危險,一般的電池配置往往考慮了電池容量的裕量,比如一倍。因此中等深度的放電在一般情況下,包括一般性的停電故障發生情況下是安全的 。
3) 周期性的短時放電 根據蓄電池應用場合選取適合的周期,例如3個月。一般短時放電的深度為5%左右,檢測裝置啟動FNN運算,預測電池的SOH。因為是預測,其可靠程度在目前仍處在研究中。這也包括FNN算法中所使用的輸入數據是否對所有 的電池失效情況均敏感。在FNN運算中,還存在算法的“保守性”一面,即寧可低估SOH,也放棄高估SOH所帶來的風險。
因此,互動方案在長期運行方式如圖2-2所示,一般為多次短時放電測試后加入一次中等深度放電,或者在短時放電測試結果發現電池可能嚴重劣化時進行一次中等放電予以確認。如果被確認預測結果正確,則通知控制中心;若證明預測有誤,則對預測模型作自適應調整。在最后一次中等深度放電確定電池劣化嚴重后,采取更換措施,更換之前進行一次完全放電,本組數據對于SOH模型的完善有重要意義。
圖2-2 互動方案的監測過程
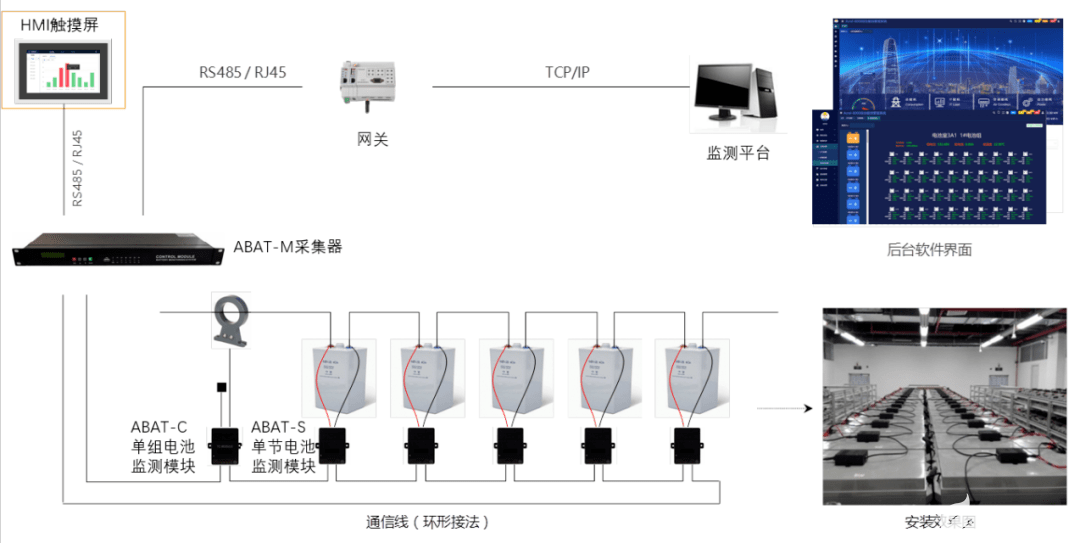
三、監測裝置的模塊化設計
3.1監測裝置設計要求
圖3-1 監測裝置硬件結構
3.2檢測模塊設計
檢測模塊主要包括5個部分:
1)? 電壓、電流、溫度的測量電路;
2)? 通道切換;
3)? A/D轉換電路;
4)? 微處理器單元;
5)? 通訊接口。
檢測模塊完成數據采集,并將數據傳給控制模塊。高精度、高時效的數據采集模塊采用模塊化設計方案,兼顧了專用化與通用化原則,配置靈活,根據采樣點種類及規模的需求,各個模塊可單獨使用,亦可自由組合,能適應不同的監測場合。
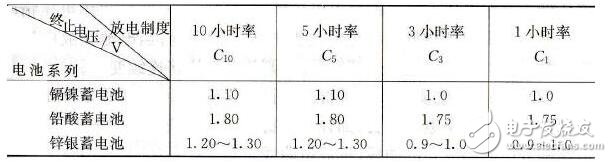
電池組是由多個單電池串聯構成的,一般的配置情況如表3-1所示。
電池的串聯給采樣電路的設計帶來困難,目前的主要解決方法有以下幾種:
1)? 繼電器切換 由于機械觸點的壽命和可靠性問題,不能使用在需要快速巡檢的場合。
2)? 分段采樣 將電池組分段,使得每段的電壓降低,使用常規的巡檢電路。由于每段之間需要隔離,帶來成本的提高。而且,如果發生電池開路,加在某一段的電壓仍然可能很高,同時還存在現場接線順序出錯時可能損壞電路。
3)? 電阻分壓 在許多的設計中都使用了電阻分壓方法,由于可以為每一通道設定標定系數,在一定程度上可以修正因電阻匹配精度不夠所帶來的共模誤差。該方法的長期穩定性受電阻的穩定性制約,在高共模下很難達到需要的準確度。BB公司INA117高共模運算放大器電阻的匹配達到0.005%、溫度系數為1ppm時共模抑制比為86dB,在400V共模范圍的檢測誤差達到20mV,對于2V的VRLA電池,浮充電壓的檢測準確度應該達到10mV或更優。顯然,在現實中很難用分壓方法獲得如此高的準確度。
4)? 耐高壓電子開關 本課題中使用耐高壓電子開關解決巡檢的困難。PhotoMOS是一種新型光耦合的耐高壓電子開關,它與普通的光耦相似,但輸出端為場效應管,克服了晶體管的管壓降問題,適合本文所要求的高耐壓、高精度、高速的要求。
高共模采樣電路原理如圖3-2所示,在A/D和CPU之間采用光耦合方式進行電氣隔離。
圖3-2 高共模采樣電路
3.3內阻模塊設計
內阻模塊與系統的分布式結構相適應,接受檢測模塊的調度。用于向電池組注入內阻測量的激勵信號。
內阻模塊的設計主要研究解決以下4方面問題:
1)? 受控 波形和頻率受采樣模塊CPU控制,可以工作在設計范圍內的任意頻率點和不同波形。
2)? 穩定性和準確性? 要保持長期工作的時間穩定性和溫度穩定性,模塊之間可以互換。
3)? 獨立性 激勵信號不受電池充放電回路的影響。
4)? 工作范圍寬 能夠在電池組的最低放電下限和最高充電上限范圍內正常工作。
以上要求主要體現在硬件電路設計中。
3.4控制模塊設計
控制模塊用于數據傳輸、處理和人機界面操作,具有遠程(集中)管理RS-485(RS-232)接口、檢測模塊控制口、操作鍵盤、顯示面板、聲光報警及報警輸出接點。控制單元實時顯示電池數據,智能分析數據,對異常的電池運行情況進行及時報警。通過總線結構控制檢測模塊工作,收集檢測模塊采集的數據。本單元對發生的事件進行判斷處理并發出聲光報警,完成數據的通訊、存儲和查詢功能,這些功能供運行人員進行現場事件處理使用。
四、監測裝置應用
在本文的研究過程中,監測裝置在電信48V直流系統、電力220V直流系統和石油化工400V不間斷電源系統3種典型的閥控鉛酸蓄電池應用場合得到實際應用,驗證了技術方案的合理性。
以電信局站直流系統為例,電池應用有以下特點:??????
1、48V系統,每組由24只2V單體電池串聯,一般2組電池。
2、大容量電池,擺放合理,運行環境較好。
3、難于進行周期性容量核對放電。
4、一般有備用油機,停電后一段時間即啟動油機,電池容量下降的問題更難及時發現。
5、電池數據可通過動力環境集中監控系統傳送至中央控制室。
電池監測采用了1個控制模塊帶2個采樣模塊和2個內阻模塊,該系統接入動力環境集中監控系統,與中心控制室聯網。
根據閥控鉛酸電池的一般使用情況和監測管理的目的,監測裝置的設計主要考慮以下幾個方面:
1) 浮充電壓測量 電池的運行參數主要受充電機的控制,尤其是電池的浮充電壓,直接影響電池的浮充使用壽命。浮充電壓的相對差異很小,要求測量電路具有高準確度;電池組串聯后的高電壓要求電路具有抗高共模性能。
2) 電流監測? 檢測電池充電,放電,電流值。
3) 環境溫度(或標樣電池溫度)監測。
4) 內阻測量? 在線測量每個單電池的內阻值。
5) 模塊結構 系統要滿足蓄電池應用的大部分應用場合,包括電信、電力、UPS等不同電池配置的應用。可以根據電池的不同數量、不同規格和不同的擺放形式來靈活配置,便于現場安裝與維護。
6) 網絡化設計,網絡化和信息化是電子設備的發展趨勢,系統設計要有通訊接口和多種網絡方案。要適于遠程管理和集中監控。
7) 可靠性 檢測裝置應用于對可靠性要求很高的場合,要求裝置長期穩定工作。
8) 電磁兼容 檢測裝置應對用戶設備不能產生任何附加干擾,保證用戶設備同監測系統共同長期穩定工作。同時還要求裝置具有較強的抗干擾能力,在大功率電源裝置投切時保持穩定。
如圖3-1所示,裝置由控制模塊、檢測模塊、內阻模塊、相關軟件和輔助部件構成,一個控制模塊可接入多個檢測模塊,完成對不同只數和不同電壓規格的蓄電池組的監測管理,可同時管理多組蓄電池。










 工商網監
工商網監
評論