 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
當今可用的大多數(shù)教育機器人都在小型計算機上運行,??其中包括最受歡迎的raspberry pi 、Jetson和arduino 。
我們將要研究的一些附加功能是人臉識別和對話式人工智能。
在 Raspberry Pi Model 3、4 上安裝 Virtualenvwrapper
在我們在樹莓派上開始任何 AI/ML 項目之前,我們必須先設置環(huán)境。
最好的做法是始終創(chuàng)建虛擬環(huán)境,這樣我們的基礎環(huán)境就不會受到影響,僅將其用于管理目的。
另一個原因是避免不同應用程序之間的沖突。應用程序使用同一模塊的不同版本是很常見的,因此為了避免這些沖突,我們使用不同的環(huán)境。
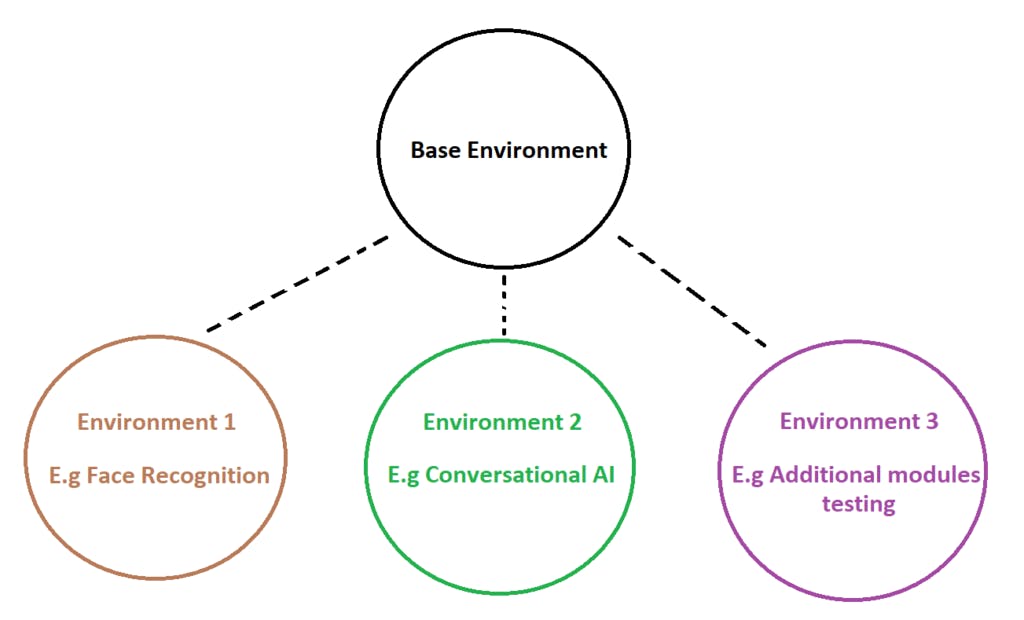
我們將使用 virtualenvwrapper:
我們將調用環(huán)境 1 – facrec (人臉識別的縮寫)
和
環(huán)境 2 – cbot (聊天機器人的縮寫)
virtualenvwrapper 5.0.1.dev2
首先,一些初始化步驟。其中大部分只需要完成一次。您需要將該命令添加source /usr/local/bin/virtualenvwrapper.sh到您的 shell 啟動文件中,根據(jù) pip 或包管理器的安裝位置更改 virtualenvwrapper.sh 的路徑。
$ pip install virtualenvwrapper
...
$ export WORKON_HOME=~/Envs
$ mkdir -p $WORKON_HOME
$ source /usr/local/bin/virtualenvwrapper.sh
$ mkvirtualenv facrec
Installing
setuptools..........................................
....................................................
....................................................
...............................done.
virtualenvwrapper.user_scripts Creating /Users/dhellmann/Envs/facrec/bin/predeactivate
virtualenvwrapper.user_scripts Creating /Users/dhellmann/Envs/facrec/bin/postdeactivate
virtualenvwrapper.user_scripts Creating /Users/dhellmann/Envs/facrec/bin/preactivate
virtualenvwrapper.user_scripts Creating /Users/dhellmann/Envs/facrec/bin/postactivate New python executable in facrec/bin/python
(facrec)$ ls $WORKON_HOME
facrec hook.log
創(chuàng)建另一個環(huán)境,稱為 cbot
(facrec)$ ls $WORKON_HOME
facrec hook.log
(facrec)$ mkvirtualenv cbot
Installing setuptools...............................
....................................................
....................................................
........... ...............................done.
virtualenvwrapper.user_scripts Creating /Users/dhellmann/Envs/cbot/bin/predeactivate
virtualenvwrapper.user_scripts Creating /Users/dhellmann/Envs/cbot/bin/postdeactivate
virtualenvwrapper.user_scripts Creating /Users/dhellmann/Envs/cbot/bin/preactivate
virtualenvwrapper.user_scripts Creating /Users/dhellmann/Envs/cbot/bin/postactivate New python executable in cbot/bin/python
(env2)$ ls $WORKON_HOME
facrec cbot hook.log
在環(huán)境之間切換workon:
(cbot)$ workon facrec
(facrec)$ echo $VIRTUAL_ENV
/Users/dhellmann/Envs/facrec
(facrec)$
列出所有環(huán)境:
lsvirtualenv [-b] [-l] [-h]
顯示單個 virtualenv 的詳細信息:
showvirtualenv [env]
在 WORKON_HOME 中刪除一個環(huán)境:
rmvirtualenv ENVNAME
在刪除當前環(huán)境之前,您必須使用 deactivate。
(mynewenv)$ deactivate
$ rmvirtualenv mynewenv
$ workon
$
從虛擬環(huán)境切換到系統(tǒng)安裝的 Python 版本:
deactivate
環(huán)境位于:
cd ~/.virualenvs
現(xiàn)在我們可以開始在環(huán)境中安裝了 :))
?
在 Raspberry Pi Model 3、4 上設置人臉識別
現(xiàn)在我們的虛擬環(huán)境已經(jīng)設置好了,讓我們繼續(xù)在虛擬環(huán)境(facrec)中安裝人臉識別包。
步驟1
在(facrec)環(huán)境中,安裝 OpenCV。這是一個記錄在案的鏈接:
https://www.pyimagesearch.com/2019/09/16/install-opencv-4-on-raspberry-pi-4-and-raspbian-buster/
第2步
安裝dlib、face_recognition、imutils:
https://www.pyimagesearch.com/2018/06/25/raspberry-pi-face-recognition/
哎呀,這是一些工作!
現(xiàn)在我們的樹莓派可以檢測到我們的臉,我們可以讓它打個招呼并開始與我們交談!
?
在 Raspberry Pi 模型 3、4 上設置 Python 聊天機器人(第 1 部分,共 2 部分)
在這篇文章中,我們將在我們的樹莓派上創(chuàng)建一個聊天機器人,它將與我們進行對話,如下所示:
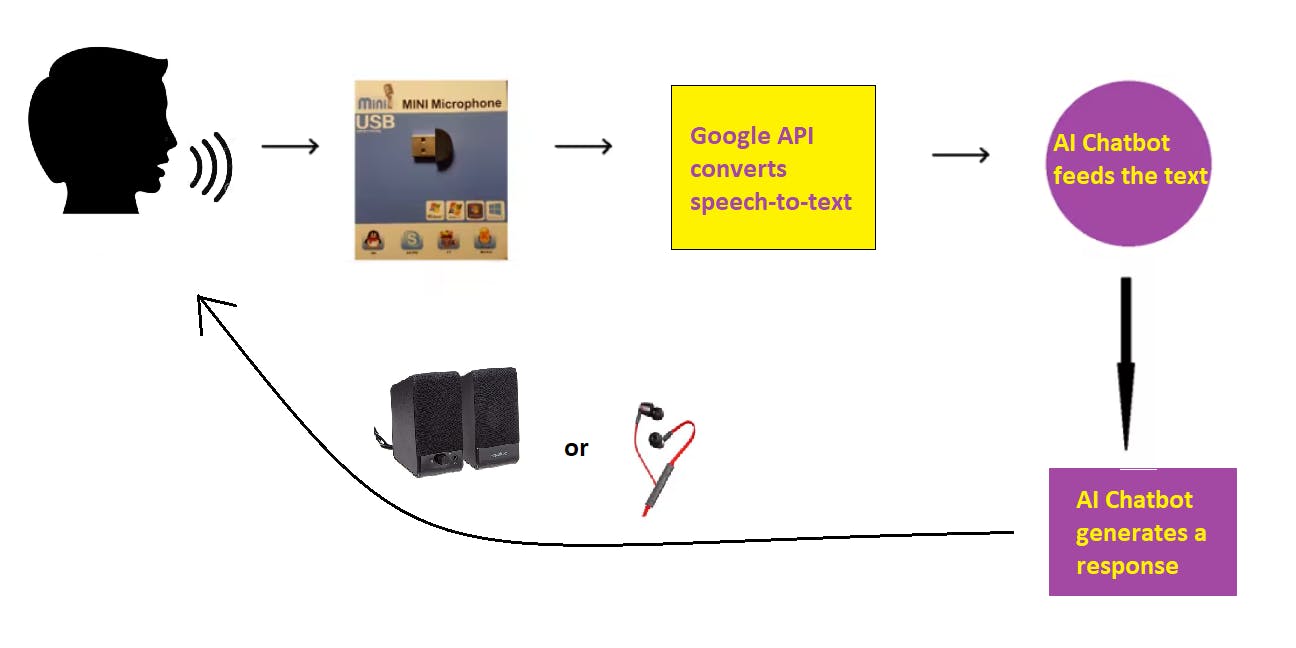
您可以使用任何麥克風。在第 4 步中,說明了上述麥克風的設置。只需編輯您可能擁有的任何其他麥克風的主要聊天機器人代碼(本文的第 2 部分)。
在第 1 部分中,我們將首先設置環(huán)境。
在我們的虛擬環(huán)境 cbot(我們在之前的文章中創(chuàng)建)中,讓我們按照以下步驟設置聊天機器人所需的必要軟件包。
?
步驟1
我們必須安裝 Tensorflow 2.x 版本但發(fā)出命令:
點安裝張量流
只安裝舊版本。因此,要安裝最新版本,請運行以下命令:
sudo apt-get install -y libhdf5-dev libc-ares-dev libeigen3-dev
python3 -m pip install keras_applications==1.0.8 –no-deps
python3 -m pip install keras_preprocessing==1.1.0 –no-deps
python3 -m pip install h5py==2.9.0
sudo apt-get install -y openmpi-bin libopenmpi-dev
sudo apt-get install -y libatlas-base-dev
python3 -m pip install -U 六輪模擬
從https://github.com/lhelontra/tensorfl選擇一個 tensorflow 版本…… (我選擇了 2.0.0):
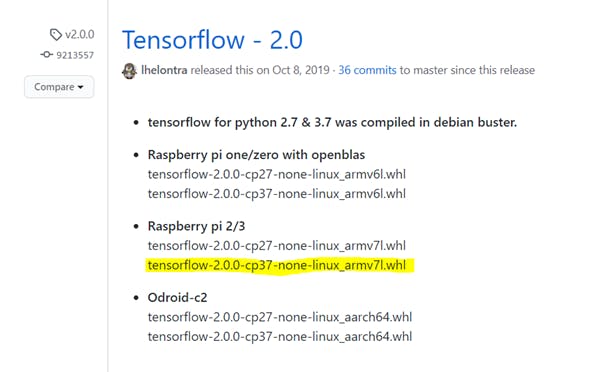
現(xiàn)在復制相應的鏈接地址:

wget 'paste_link_address_here'
python3 -m pip 卸載張量流
python3 -m pip install 'whatever_package_name'
例如:
python3 -m pip install 'tensorflow-2.0.0-cp37-none-linux_armv7l.whl'
重新啟動您的終端
TensorFlow 2.3 在 cbot 環(huán)境下安裝成功
?
第2步
安裝以下軟件包:
pip install chatterbot==1.0.0
點安裝正則表達式==2019.11.1
pip install python-dateutil==2.7
點安裝 PyAudio
點安裝 nltk
點安裝 Keras
?
第 3 步
接下來,我們設置語音識別以將我們所說的內容轉換為文本。這將輸入到聊天機器人模型以生成響應。
運行以下命令記錄音頻 5 秒:
arecord -D plughw:1,0 -d 5 the_audio.wav
?
第4步
接下來我們安裝 espeak ,用于語音輸出(到耳機或揚聲器)。
安裝 espeak:
要測試 espeak,請創(chuàng)建文本文件,例如 speakthis.txt,然后在“hello my friend”中寫下句子。
要從文件中說話,請運行以下命令:
espeak -f speakthis.txt –stdout |aplay
你應該聽到你在 speakthis.txt 文件中寫的任何內容(在我的例子中,它說“你好,我的朋友”)
有關 espeak 命令的列表,請參閱:
http://espeak.sourceforge.net/commands.html
萬歲!我們的環(huán)境很好,現(xiàn)在我們可以繼續(xù)創(chuàng)建 AI python 聊天機器人并將所有內容粘合在一起。
在 Raspberry Pi 模型 3、4 上設置 Python 聊天機器人(第 2 部分,共 2 部分)
現(xiàn)在我們的 python 聊天機器人環(huán)境已經(jīng)在我們的樹莓派上設置好了,讓我們開始運行代碼。
首先下載包含所有必要代碼和文件的 trivchat 文件夾:
https://github.com/wajidahmad89/rexythebot/tree/main/trivchat
將其保存到桌面,因此位置將是桌面/trivchat
讓我們快速瀏覽一下 trivchat 中的重要文件
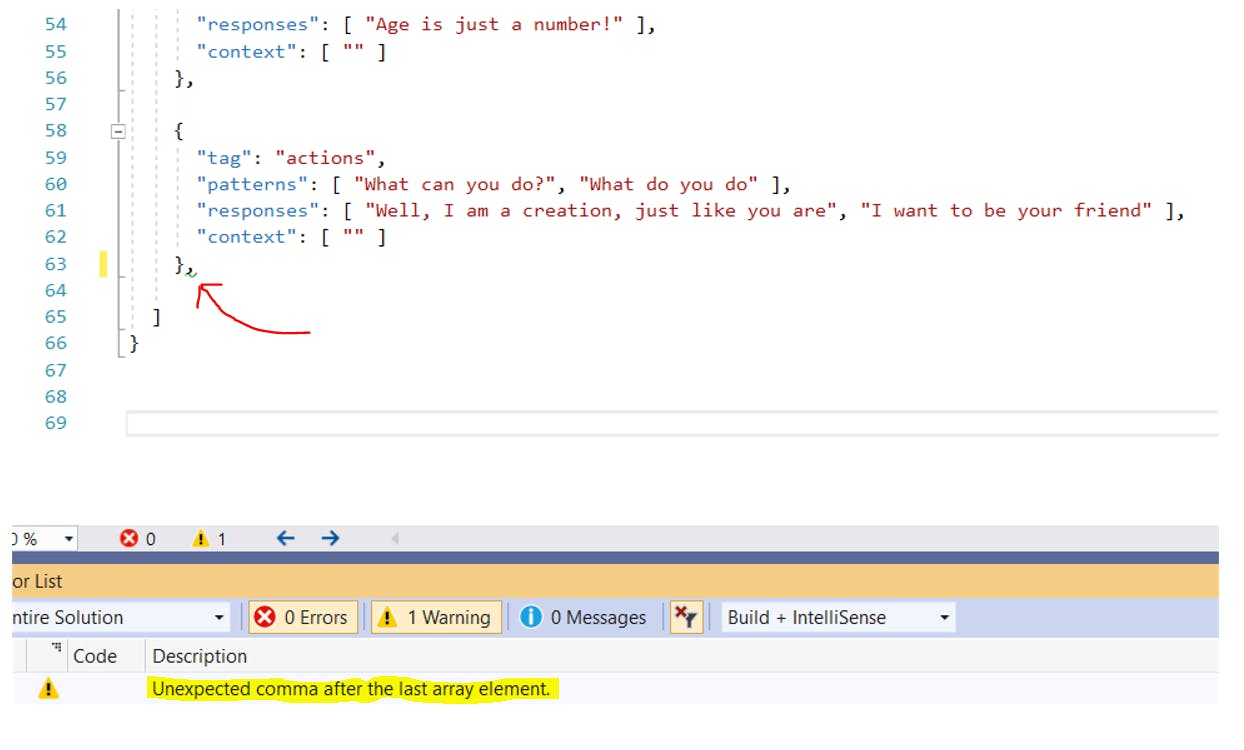
1.首先我們有intents.json
這個文件將包含所有你能想到的問題和答案。繼續(xù)添加它!
2. 其次我們有 trainchatbot.py
這個訓練神經(jīng)網(wǎng)絡并創(chuàng)建 chatbot_model.h5
3. 第三,我們有 cbot_main.py
所有的聽力、處理和口語都發(fā)生在 cbot_main.py
4. 第四,the_audio.wav 是音頻輸入,你所說的最后錄音會覆蓋在這個文件上。
5. 第五,userinput.txt 文件將轉換后的語音轉文本寫入此處。botresponse.txt 里面有你演講的答案。
6. 第六,我們有 hello_camera-output.txt,它啟動與“Hello John”的對話,正如我們在其中所寫的那樣。同樣,goodbye_camera-output.txt 有對話結束,所以我們在里面寫了“再見約翰”。
筆記
當您編輯 intents.json 時,請確保不要留下任何錯誤!
Visual Studio 是查找錯誤的不錯選擇,例如:
步驟1
在命令提示符下:
pi@raspberrypi:~ $ cd 桌面/trivchat
pi@raspberrypi:~/Desktop/trivchat $ workon cbot
(如下圖所示,cbot 環(huán)境已激活,其中包含必要的包)
(cbot) pi@raspberrypi:~/Desktop/trivchat $ pythontrain_chatbot.py
它應該打印“模型創(chuàng)建”
第2步
現(xiàn)在我們運行 cbot_main.py
(cbot) pi@raspberrypi:~/Desktop/trivchat $ python cbot_main.py

現(xiàn)在它應該顯示“正在播放……”用于音頻輸出,因此您必須通過耳機/揚聲器聆聽它在說什么
,
“錄音……”用于音頻輸入,這是當您說話時,它會聽 5 秒鐘。文件userinput.txt將包含您所說的所有語音,文件botresponse.txt將包含所有機器人響應
?
和你的樹莓派聊天玩得開心
xD
筆記
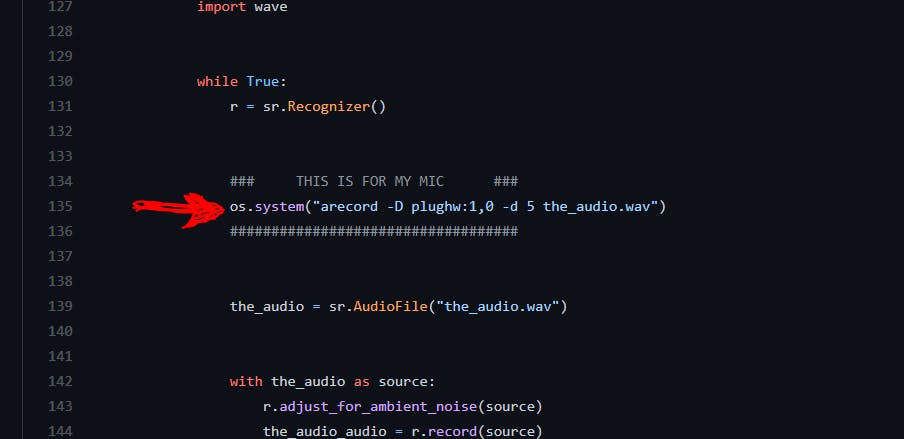
如果您的麥克風與使用的麥克風不同,您可以在第 135 行編輯 cbot_main.py 以錄制您的演講并將其保存為 the_audio.wav
?
?
在 Raspberry Pi 模型 3、4 上運行人臉識別和 Python 聊天機器人
在這篇文章中,我們將把人臉識別 + python 聊天機器人功能合并在一起。當有人被識別時,樹莓派會說“你好”并開始對話。
步驟1
首先下載下面的fareg文件夾:
https://github.com/wajidahmad89/rexythebot/tree/main/fareg
將 FAREG 文件夾放在桌面上
用人名創(chuàng)建一個文件夾,
在 fareg/dataset
人的圖片會位于這個文件夾中
在命令提示符下:
努力工作
cd 桌面/票價
python encode_faces.py –dataset dataset –encodings encodings.pickle –detection-method hog
這將在 fareg 文件夾中創(chuàng)建 encodings.pickle 文件
稍后我們將在腳本中運行 facrec_main.py。
facrec_main.py 的作用是將相機識別的名稱寫入 trivchat 文件夾中的 camera-output-raw.txt。如果一個名字重復超過 3 次(在 camera-output-raw.txt 內),這是一個很好的措施來識別正確的人,所以這個確認的名字被寫入 hello_camera-output.txt ,說“你好%name%” ,
以及寫到 goodbye_camera-output.txt ,說
“再見 %name%”
hello_camera-output.txt 和 goodbye_camera-output.txt 也位于 trivchat 文件夾中。
第2步
其次將rexy_master文件下載到桌面:
https://github.com/wajidahmad89/rexythebot/tree/main/rexy_master
最后運行人臉識別+python聊天機器人:
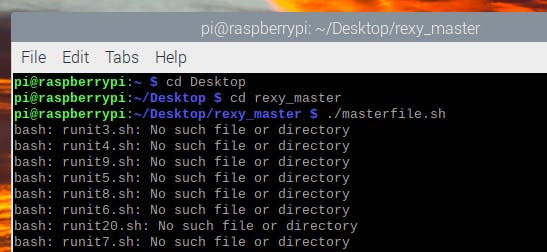
下面顯示一次
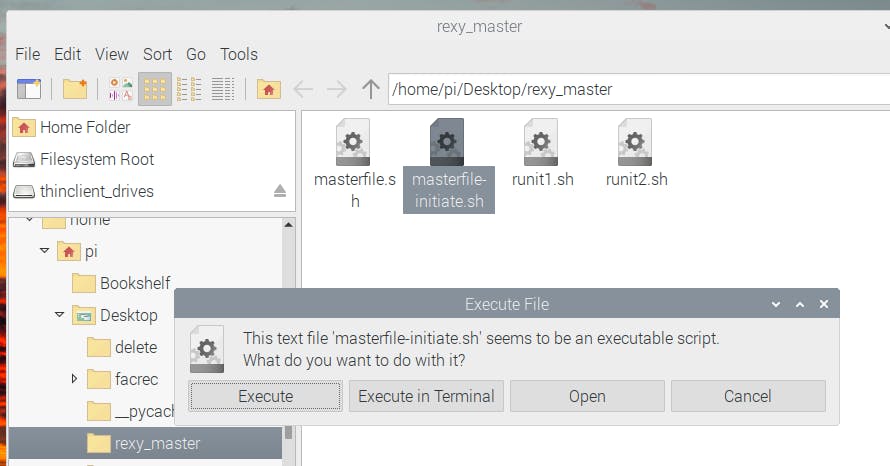
轉到“masterfile-initiate.sh”文件并雙擊執(zhí)行它
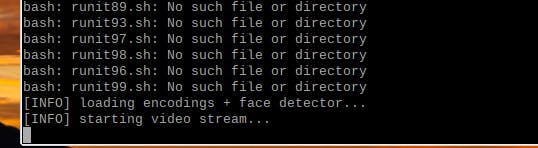
與啟動相機之前一樣,一旦人臉被識別,機器人就會開始對話。
一旦人臉識別,聊天機器人將開始對話。
嘻嘻!
Seeed Fusion 團隊正在啟動一項 Raspberry Pi CM4 贊助計劃,以支持基于 CM4 的設計。使用 Seeed PCB 組裝服務制造您的定制 Raspberry Pi CM4 載板,最高可減 $500!
- 檢測機器人開源分享
- 坦克機器人開源分享
- DIY會說話的人形機器人頭
- 創(chuàng)建會說話的植物開源項目
- 掃地機器人開源資料 44次下載
- 機器人守衛(wèi)開源分享
- 伺服機器人開源分享
- 堆肥機器人開源分享
- 會說話的顏色檢測系統(tǒng)
- 英雄機器人開源
- 機器人開源案例
- Humaniod AI會說話的機器人與Arduino
- Arduino機器人開源分享
- 基于DSP和PC的農(nóng)業(yè)機器人控制系統(tǒng) 18次下載
- 如何使用STC89C52單片機進行斗牛玩具機器人的研究概述 13次下載
- 字節(jié)發(fā)布機器人領域首個開源視覺-語言操作大模型,激發(fā)開源VLMs更大潛能 561次閱讀
- 機器人技術中常用的路徑規(guī)劃算法的開源庫 1188次閱讀
- 面對疫情 醫(yī)療機器人能幫上什么忙? 2236次閱讀
- dfrobotSparki機器人套裝簡介 2207次閱讀
- dfrobot語音合成模塊介紹 3378次閱讀
- 工業(yè)機器人編程入門_工業(yè)機器人的編程要求 9787次閱讀
- 醫(yī)用機器人的定義_醫(yī)用機器人發(fā)展 3257次閱讀
- 醫(yī)用機器人的功能_醫(yī)用機器人分類 2462次閱讀
- 機器人控制器有哪些類型_機器人控制器發(fā)展 1.2w次閱讀
- 協(xié)作機器人的起源_為什么需要協(xié)作機器人 8322次閱讀
- 機器視覺的機器人取代四臺傳統(tǒng)的火焰處理機器人 3370次閱讀
- 如何區(qū)分機器人、協(xié)作機器人和移動機器人? 7029次閱讀
- 觀摩大神!手把手教你做一個玩具機器人 8523次閱讀
- 軟體機器人 前所未見的機器人 3770次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.5w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1一款入耳式耳機的仿真與分析
- 0.44 MB | 2次下載 | 免費
- 2Eurotherm TKS Temperature 用戶手冊
- 1.46 MB | 2次下載 | 免費
- 3無線系統(tǒng)中天線和RF元件電磁建模
- 7.48 MB | 1次下載 | 4 積分
- 4納祥科技NX6806中文規(guī)格書,8位AD和DA單片機拓展,國產(chǎn)替代PCF8591
- 3.04 MB | 1次下載 | 免費
- 5藍牙無線遙控小車
- 10.49 MB | 1次下載 | 2 積分
- 6Multisim模擬電路仿真教程
- 1.93 MB | 1次下載 | 3 積分
- 7MOSFET講解-10(可下載)
- 524.12 KB | 次下載 | 免費
- 8DMP300C1型微機變壓器保護測控裝置技術說明書
- 4.11 MB | 次下載 | 10 積分
本月
- 1晶體三極管的電流放大作用詳細說明
- 0.77 MB | 32次下載 | 2 積分
- 2Python從入門到精通背記手冊
- 18.77 MB | 25次下載 | 1 積分
- 3雙極型三極管放大電路的三種基本組態(tài)的學習課件免費下載
- 4.03 MB | 23次下載 | 1 積分
- 4多級放大電路的學習課件免費下載
- 1.81 MB | 21次下載 | 2 積分
- 5九陽豆?jié){機高清原理圖
- 2.47 MB | 16次下載 | 1 積分
- 6AIWA HS-J202/HS-J202M/HS-J800維修手冊
- 13.60 MB | 15次下載 | 10 積分
- 71875功放原理圖
- 0.04 MB | 11次下載 | 免費
- 8東芝彩色電視機29SF6C維修說明書
- 4.86 MB | 9次下載 | 1 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420063次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191382次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183337次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81585次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73814次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論