 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
介紹
在本文中,我們將介紹如何使用 Python 編程語言中的 OpenCV 庫在 LattePanda 上實(shí)現(xiàn)人臉識(shí)別。
我們使用的操作系統(tǒng)是 LattePanda 上默認(rèn)的 Windows 10。
1. 軟件準(zhǔn)備
安裝 Python
首先,請(qǐng)從官網(wǎng)下載最新的Python。注意Python有兩個(gè)版本,一個(gè)是2.7.x版本,一個(gè)是3.x版本。2.7.x 版本是較舊的版本,將來會(huì)被棄用,所以在這個(gè)項(xiàng)目中我們使用 Python3,本文中的最新版本是3.6.1 。
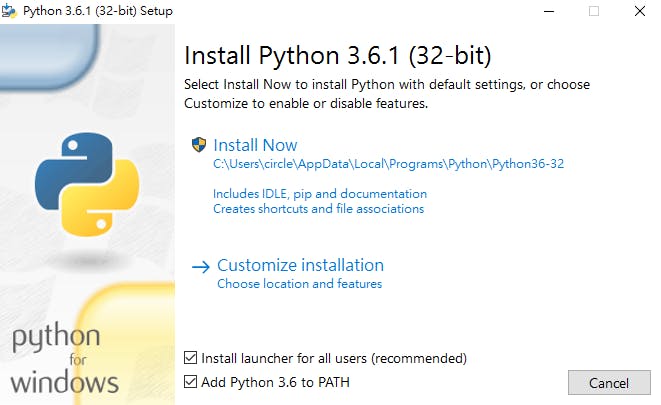
請(qǐng)按照下圖安裝。
安裝 Python 時(shí)不要忘記勾選“ Add Python 3.6 to PATH ”選項(xiàng),它使 Windows 系統(tǒng)能夠調(diào)用 Python 可執(zhí)行文件。
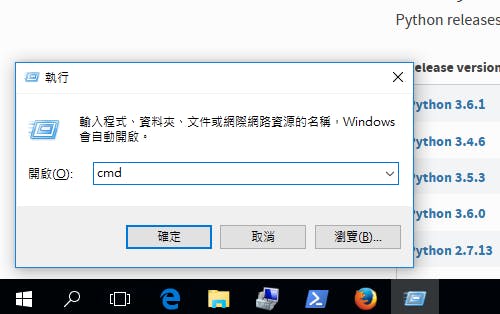
安裝后,為了測(cè)試我們是否可以在 LattePanda 上運(yùn)行 Python,請(qǐng)按快捷鍵“Win+R”啟動(dòng)命令提示符并輸入“ cmd ”。
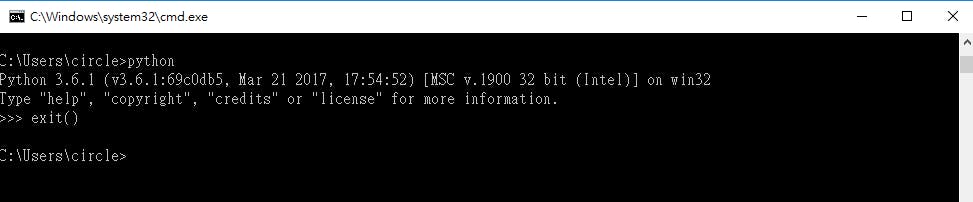
接下來,在 cmd 中鍵入“ python ”以啟動(dòng) Python 交互會(huì)話。如果出現(xiàn)符號(hào)“ >>> ”,則表示 Python 已成功安裝并在您的操作系統(tǒng)上運(yùn)行。否則,如果您看到任何錯(cuò)誤消息,請(qǐng)檢查安裝步驟,尤其是PATH選項(xiàng)。

請(qǐng)輸入“ exit() ”命令退出此shell并返回命令提示符。
安裝所需的軟件包
現(xiàn)在,我們將使用Python 包管理器(pip)安裝這個(gè)項(xiàng)目的三個(gè)必要的 Python 包
1. 請(qǐng)?jiān)诿钐崾痉螺斎搿?pip install numpy ”安裝此Python數(shù)值計(jì)算工具。

2.接下來,輸入“ pip install opencv-python ”來安裝OpenCV,一個(gè)開源的計(jì)算機(jī)視覺庫,我們?cè)谖覀兊捻?xiàng)目中使用它來識(shí)別人臉。

3、最后輸入“ pip install pyserial ”安裝Python的串口通訊工具。我們使用這個(gè)庫與 Python 和 Arduino 建立串行連接。

Thonny - Python IDE
人們可能需要一些工具來有效地編寫代碼。這是我們向您推薦的一個(gè)名為Thonny的優(yōu)秀 Python IDE 。該 IDE 集成了適合初學(xué)者的所有基本工具(調(diào)試器、python shell、變量等)。
您可以從官方網(wǎng)站下載它:.
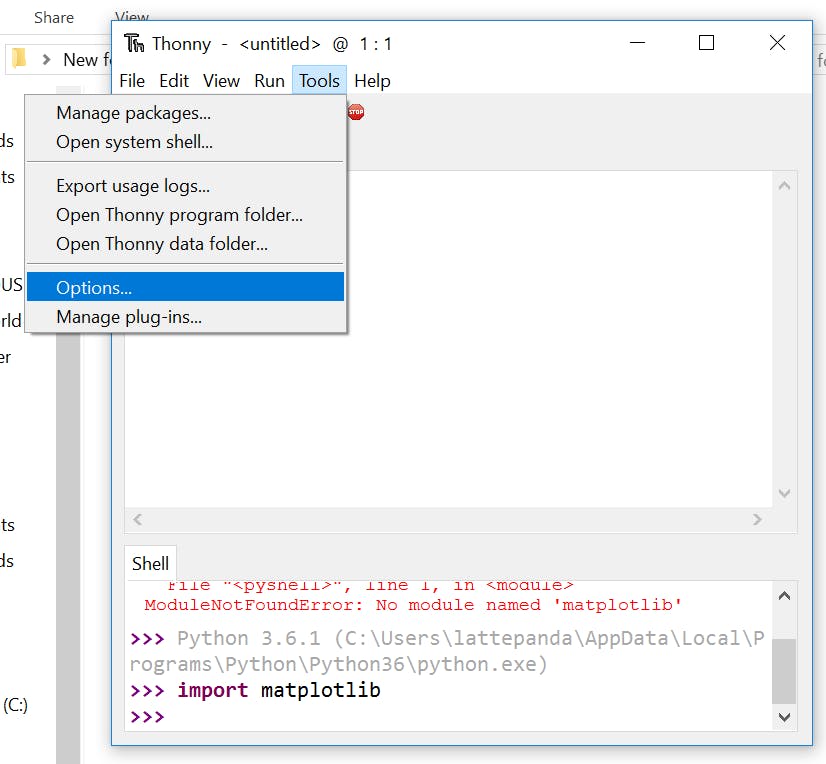
為了讓 Thonny 使用之前安裝的 Python 包,我們需要將解釋器的默認(rèn)路徑更改為 Windows 系統(tǒng)中 Python 可執(zhí)行文件的位置。
在 thonny IDE 中,單擊工具,然后單擊選項(xiàng)以打開首選項(xiàng)窗口:
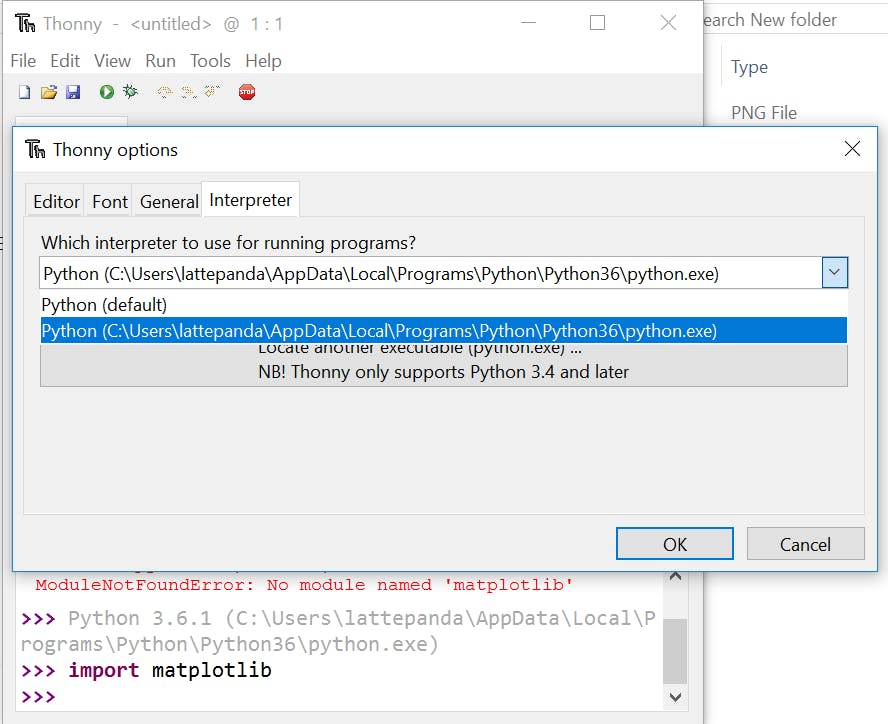
在這個(gè)窗口中,點(diǎn)擊interpreter選項(xiàng)卡,將路徑設(shè)置為默認(rèn)的Python安裝路徑,如下圖:
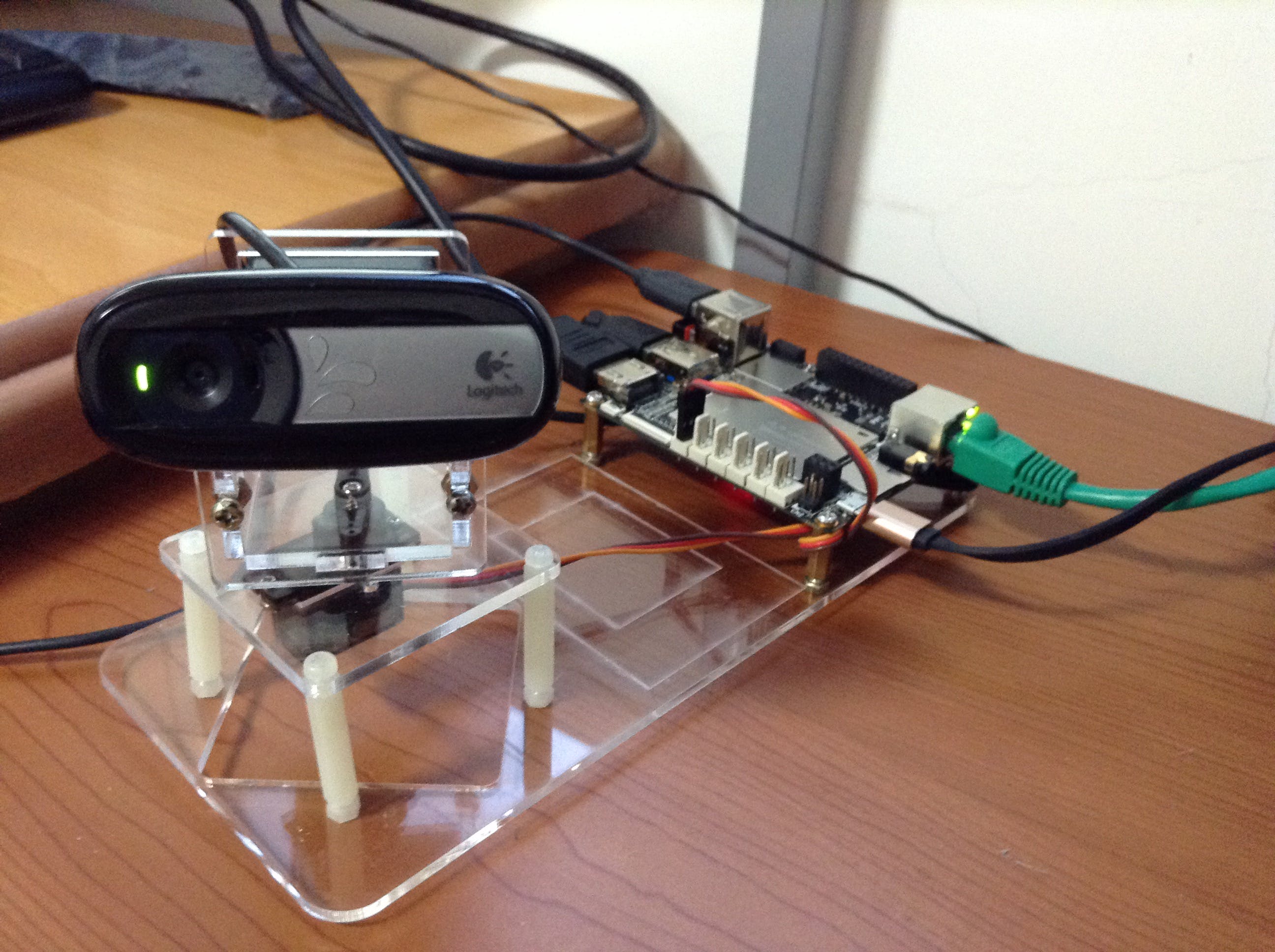
2.硬件
我們?cè)谶@個(gè)項(xiàng)目中使用Logitech C270 網(wǎng)絡(luò)攝像頭(或幾乎任何其他帶有 USB 連接器的網(wǎng)絡(luò)攝像頭)來識(shí)別人臉。而要跟蹤人臉位置,我們需要一個(gè)小的旋轉(zhuǎn)平臺(tái)。如下圖所示,我們使用底部的小型伺服電機(jī)(Tower Pro MG90)來旋轉(zhuǎn)安裝在其上的相機(jī)。您可以在Thingiverse 網(wǎng)站上查看現(xiàn)成的網(wǎng)絡(luò)攝像頭/伺服支架。
請(qǐng)注意,伺服信號(hào)線連接到LattePanda 上的Arduino 引腳 9 。確保正確連接,棕色接地針朝外,如 LattePanda 上標(biāo)記的那樣。
三、軟件實(shí)現(xiàn)
阿杜諾素描
請(qǐng)啟動(dòng) Arduino IDE 并將以下代碼下載到 LattePanda 的 Arduino Leonardo 內(nèi)核(您必須指定正確的 COM 端口,通常是COM4 )。
在這段代碼中,LattePanda 的 Arduino 芯片會(huì)從串口接收到兩條不同的指令,如果指令是“ a ”或“ b ”,則將相機(jī) CCW 或 CW 轉(zhuǎn)動(dòng) 1 度(此值可根據(jù)你的要求)。
由于我們已將伺服連接到 LattePanda Arduino D9引腳,當(dāng)然我們必須在您的 Arduino 草圖(第 9 行)中指定它。如果要將伺服切換到另一個(gè)引腳,請(qǐng)記住將“ s.attach(9) ”這一行中的引腳號(hào)修改為實(shí)際引腳號(hào)。伺服上限 (180) 和伺服下限 (0) 可以根據(jù)物理設(shè)置進(jìn)行修改。
//Arduino sketch
//waiting command from LattePanda (Python) to control servo
#include
Python 腳本
我們已經(jīng)準(zhǔn)備好了 Python 庫和 IDE,現(xiàn)在讓我們完成人臉跟蹤的實(shí)現(xiàn)。
由于我們要在這個(gè)項(xiàng)目中檢測(cè)人臉,請(qǐng)從OpenCV github(https://github.com/opencv/opencv/tree/master/data/haarcascades)下載現(xiàn)有模型,我們需要兩個(gè)xml文件:
- haarcascade_frontalface_default.xml :用于人臉檢測(cè)
- haarcascade_eye.xml :用于眼睛檢測(cè)。
首先,我們將調(diào)用函數(shù)“ cv2.VideoCapture(0) ”從分辨率為 640x480 的相機(jī)中檢索圖像數(shù)據(jù)。接下來,我們構(gòu)建串行連接(第 9行中的COM4 )與 Arduino 內(nèi)核通信,并使用它來控制伺服角度。
while循環(huán)中的識(shí)別功能就是簡(jiǎn)單地將每一幀中的原始圖像轉(zhuǎn)換為灰度顏色,然后使用識(shí)別模型(face_cascade和eye_cascade)在這一幀中找到最可能的人臉。
如何確定我們想要的臉?該程序?qū)⒂?jì)算圖像中有多少張臉并選擇最大的一張。
為了跟蹤人臉,程序首先計(jì)算人臉的位置(第22行中的position = x + w/2.0 ),x是標(biāo)記人臉的矩形的左上角坐標(biāo),w是矩形的寬度.
LattePanda 得到人臉位置后,將其與圖像中心(#24~27 行)進(jìn)行比較,并發(fā)出命令旋轉(zhuǎn)相機(jī)平臺(tái)以補(bǔ)償差異。
注意,我們已經(jīng)指定中心線為320 (由 640/2 導(dǎo)出,640 是每個(gè)圖像幀的分辨率寬度)。所以如果你想修改分辨率或者使用另一個(gè)網(wǎng)絡(luò)攝像頭,不要忘記改變這個(gè)參數(shù)。
import cv2
import numpy as np
import serial
face_cascade = cv2.CascadeClassifier('./haarcascade_frontalface_default.xml')
eye_cascade = cv2.CascadeClassifier('./haarcascade_eye.xml')
cap = cv2.VideoCapture(0)
cap.set(3, 640)
cap.set(4, 480)
ser = serial.Serial('COM4', 115200)
while True:
_, img = cap.read()
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
faces = face_cascade.detectMultiScale(gray, 2, 5)
if len(faces):
(x, y, w, h) = max(faces, key=lambda face: face[2]*face[3])
cv2.rectangle(img,(x,y),(x+w,y+h),(255,0,0),2)
roi_gray = gray[y:y+h, x:x+w]
roi_color = img[y:y+h, x:x+w]
eyes = eye_cascade.detectMultiScale(roi_gray)
for (ex,ey,ew,eh) in eyes:
cv2.rectangle(roi_color,(ex,ey),(ex+ew,ey+eh),(0,255,0),2)
position = x + w/2.0
print(position)
if position < 320:
ser.write(b'a')
else:
ser.write(b'b')
cv2.imshow('face', img)
k = cv2.waitKey(5) & 0xFF
if k == 27:
break
cv2.destroyAllWindows()
演示視頻
檢查這個(gè)項(xiàng)目的性能,我們?cè)?a href='http://m.xsypw.cn/v/tag/107/' target='_blank' class='arckwlink_none'>手機(jī)上顯示一張人臉圖片,你可以看到網(wǎng)絡(luò)攝像頭會(huì)嘗試將其中心對(duì)準(zhǔn)人臉。欣賞~
?
- 使用Xbox Kinect和OpenCV進(jìn)行面部識(shí)別
- YNH-950 人臉識(shí)別主板規(guī)格書
- 非理想環(huán)境下的改進(jìn)人臉識(shí)別算法 3次下載
- 基于聚類分析的復(fù)雜環(huán)境中人臉目標(biāo)識(shí)別技術(shù) 10次下載
- 利用小尺度核卷積的人臉表情識(shí)別方法 9次下載
- 基于深度學(xué)習(xí)的快速人臉識(shí)別算法及模型 13次下載
- 基于圖像融合的視頻人臉識(shí)別算法就相關(guān)指標(biāo) 12次下載
- 如何實(shí)現(xiàn)復(fù)雜背景中的快速人臉識(shí)別技術(shù)研究 15次下載
- 使用OpenCV進(jìn)行車牌數(shù)字識(shí)別的資料免費(fèi)下載 29次下載
- 如何提高復(fù)雜環(huán)境下的人臉識(shí)別的增強(qiáng)算法資料概述 8次下載
- openCV人臉檢測(cè)系統(tǒng)的設(shè)計(jì)方案探究 3次下載
- OpenCV3編程入門-源碼例程全集-人臉識(shí)別 2次下載
- 人臉識(shí)別 13次下載
- 基于OpenCV的圖像特征智能識(shí)別系統(tǒng)設(shè)計(jì) 20次下載
- 基于openCV的人臉檢測(cè)識(shí)別系統(tǒng)的設(shè)計(jì) 477次下載
- 基于OpenCV的人臉識(shí)別系統(tǒng)設(shè)計(jì) 1.2w次閱讀
- 人臉識(shí)別技術(shù)的原理是什么 人臉識(shí)別技術(shù)的特點(diǎn)有哪些 2124次閱讀
- 一文看懂人臉識(shí)別技術(shù) 3167次閱讀
- 基于SeetaFace2和OpenCV實(shí)現(xiàn)人臉識(shí)別 2759次閱讀
- 什么是人臉識(shí)別?如何使用10行代碼實(shí)現(xiàn)人臉識(shí)別 5475次閱讀
- 人臉識(shí)別的原理揭秘 6776次閱讀
- 人臉識(shí)別技術(shù)及應(yīng)用概覽 2184次閱讀
- 基于OpenCV和 Python的人臉識(shí)別實(shí)現(xiàn)方案 3929次閱讀
- 滴滴人臉識(shí)別怎么破解 11.9w次閱讀
- 人臉識(shí)別技術(shù)原理分析及典例詳解 9228次閱讀
- 人臉識(shí)別幾種解決方案的對(duì)比_人臉識(shí)別技術(shù)原理介紹 8w次閱讀
- 人臉識(shí)別考勤機(jī)優(yōu)缺點(diǎn)分析 2w次閱讀
- opencv人臉識(shí)別原理 8541次閱讀
- 人臉識(shí)別技術(shù)原理、特點(diǎn)及應(yīng)用 2382次閱讀
- 人臉識(shí)別成金融業(yè)“新寵” 1073次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 76次下載 | 1 積分
- 2錦銳科技CA51F2 SDK開發(fā)包
- 24.06 MB | 29次下載 | 1 積分
- 3錦銳CA51F005 SDK開發(fā)包
- 19.47 MB | 3次下載 | 1 積分
- 4蘋果iphone 11電路原理圖
- 4.98 MB | 3次下載 | 2 積分
- 5基礎(chǔ)模擬電子電路
- 3.80 MB | 3次下載 | 1 積分
- 6RA-Eco-RA6M4-100PIN-V1.0開發(fā)板資料
- 34.89 MB | 1次下載 | 免費(fèi)
- 7STM32F3系列、STM32F4系列、STM32L4系列和STM32L4+系列Cortex-M4編程手冊(cè)
- 3.32 MB | 1次下載 | 免費(fèi)
- 8聯(lián)想A820t手機(jī)維修圖紙包括主板原理圖 尾板原理圖 點(diǎn)位圖
- 0.62 MB | 次下載 | 5 積分
本月
- 1AI智能眼鏡產(chǎn)業(yè)鏈分析
- 4.43 MB | 383次下載 | 免費(fèi)
- 2蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 296次下載 | 5 積分
- 3貼片三極管上的印字與真實(shí)名稱的對(duì)照表詳細(xì)說明
- 0.50 MB | 94次下載 | 1 積分
- 4長(zhǎng)虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 91次下載 | 5 積分
- 5涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 76次下載 | 1 積分
- 6錦銳科技CA51F2 SDK開發(fā)包
- 24.06 MB | 29次下載 | 1 積分
- 7AO4803A雙P通道增強(qiáng)型場(chǎng)效應(yīng)晶體管的數(shù)據(jù)手冊(cè)
- 0.11 MB | 28次下載 | 2 積分
- 8長(zhǎng)虹液晶彩電LS29機(jī)芯的技術(shù)資料說明
- 3.42 MB | 16次下載 | 2 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191388次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81588次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論