 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
由您決定要向機器人添加多少額外的小工具。無論您使用何種文檔,只要確保將正確的BluPants 映像文件閃存到您的 SD 卡即可。
零件(基本機器人)
基本機器人是可與 BluPants 一起使用的最小可行產品 (MVP)。它只會在所有方向上導航(前進、后退、左轉和右轉)。它是您將來用于構建更復雜的機器人的基礎。
建議先組裝 MVP,然后隨著經驗的增加添加額外的功能(距離傳感器、抓爪、攝像頭、額外的伺服系統等)。
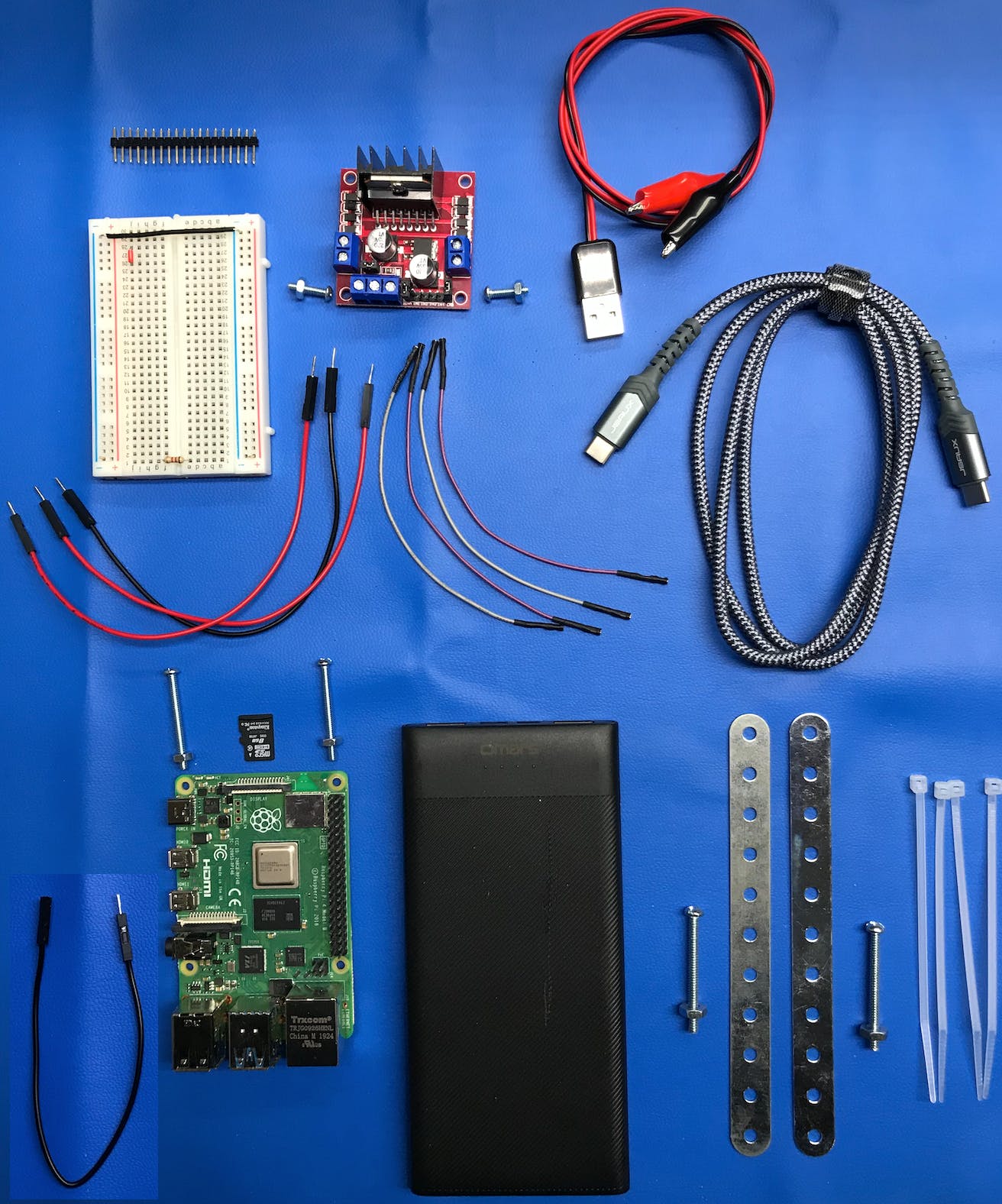
對于基本的 MVP 機器人,我們將需要以下部件:
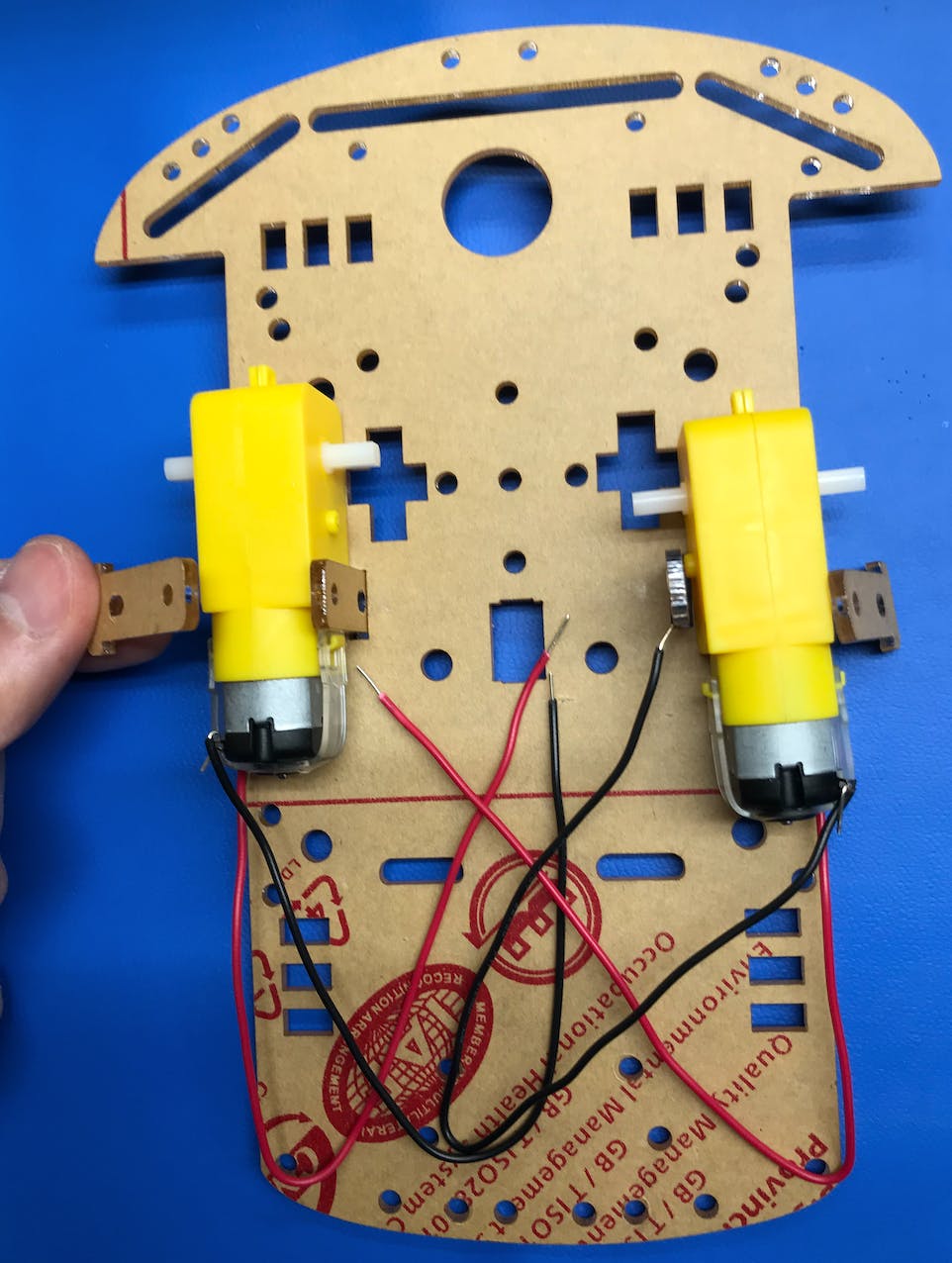
首先要做的是在焊接之前將電線連接到電機。確保電線和電機之間有良好的物理連接。
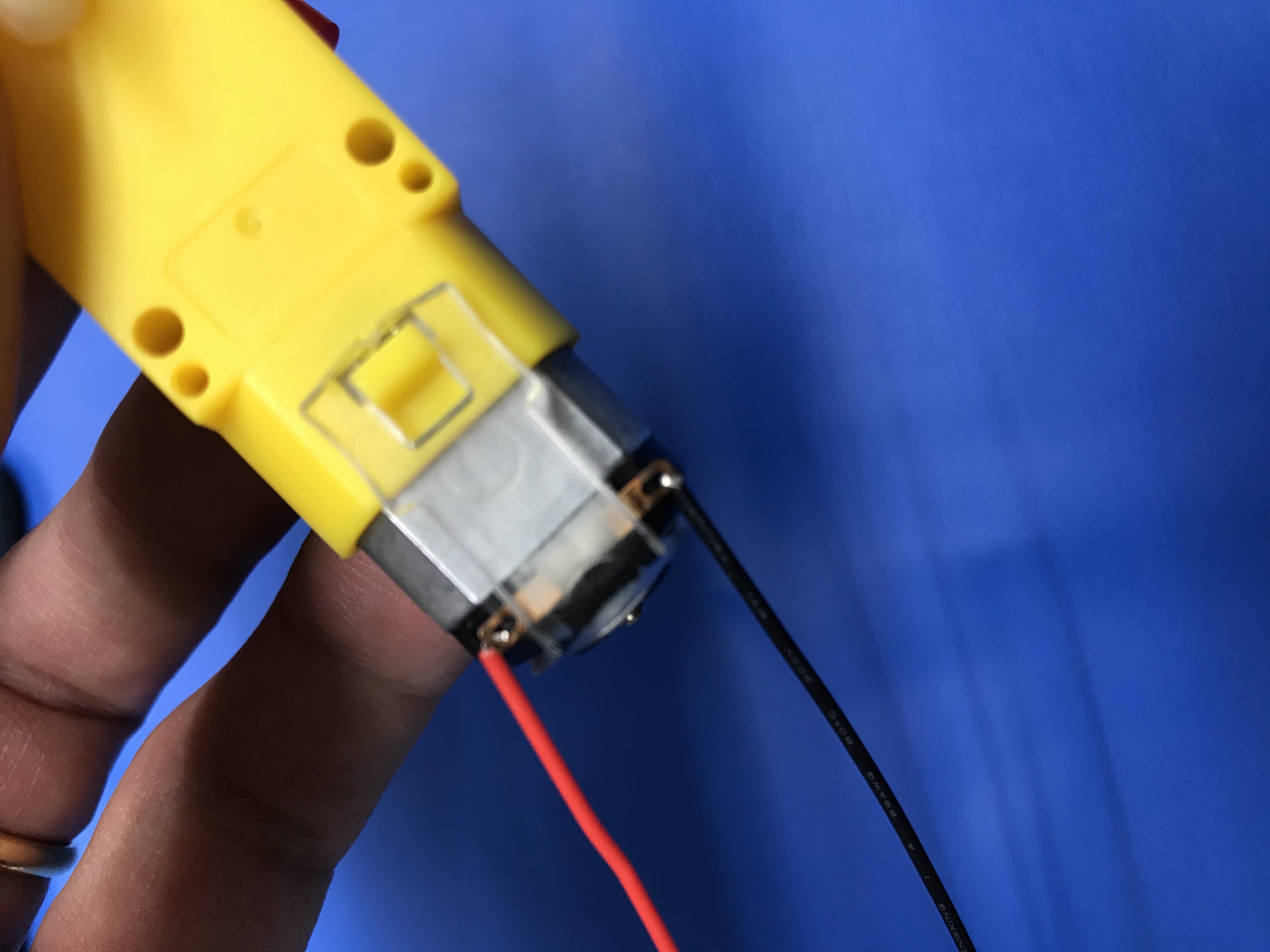
您可能需要使用電壓表或將 AA 電池連接到電線末端,以測試您是否有良好的物理連接。之后,您可能需要焊接它。
拿到底盤,把它放在電機的頂部,按照我們目前桌子上的設置:
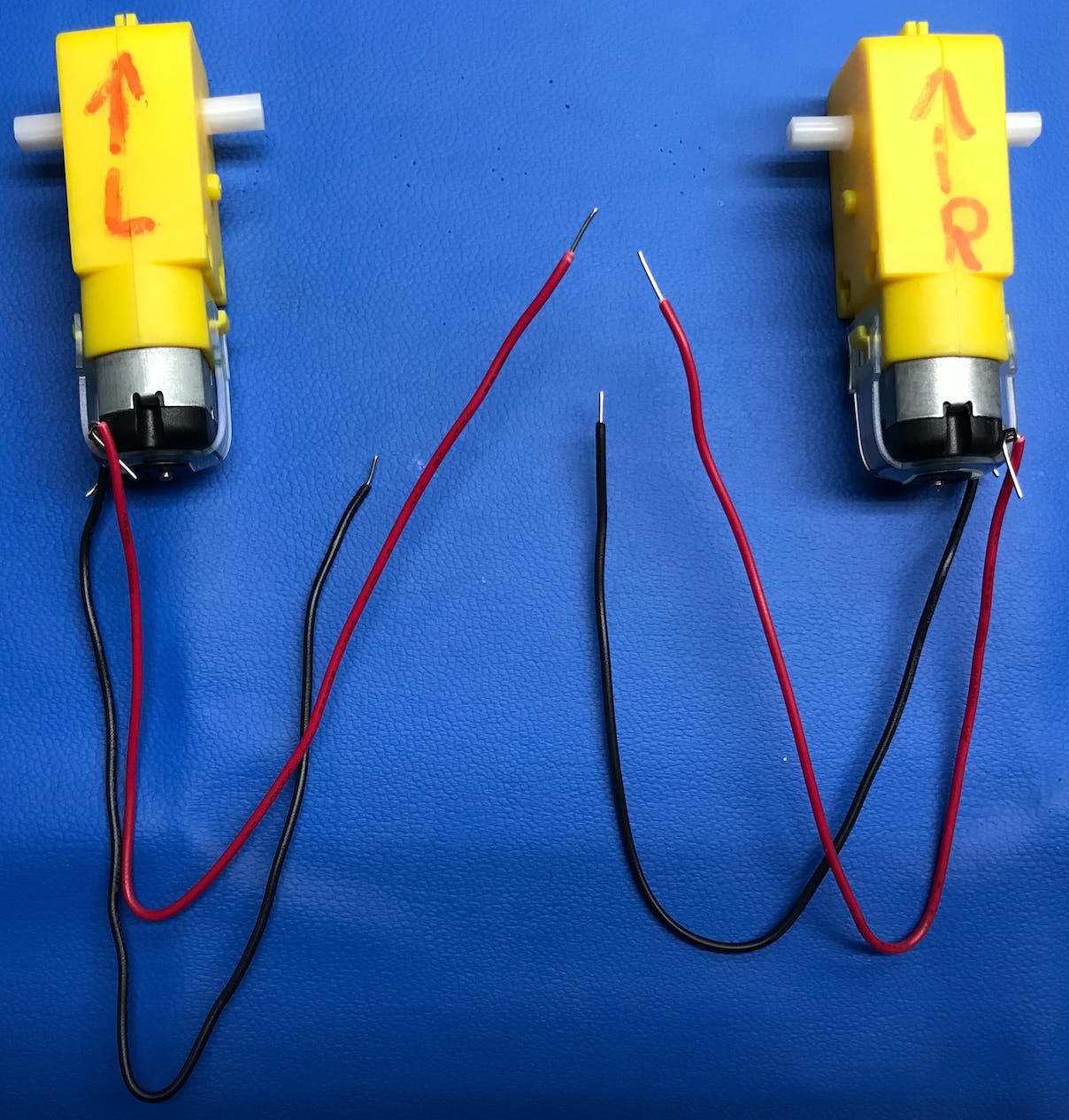
將電機固定在底盤上并將其翻轉。請注意,字母“L”和“R”將不再可見,因為底盤連接到電機的表面與我們寫字母的表面相同。
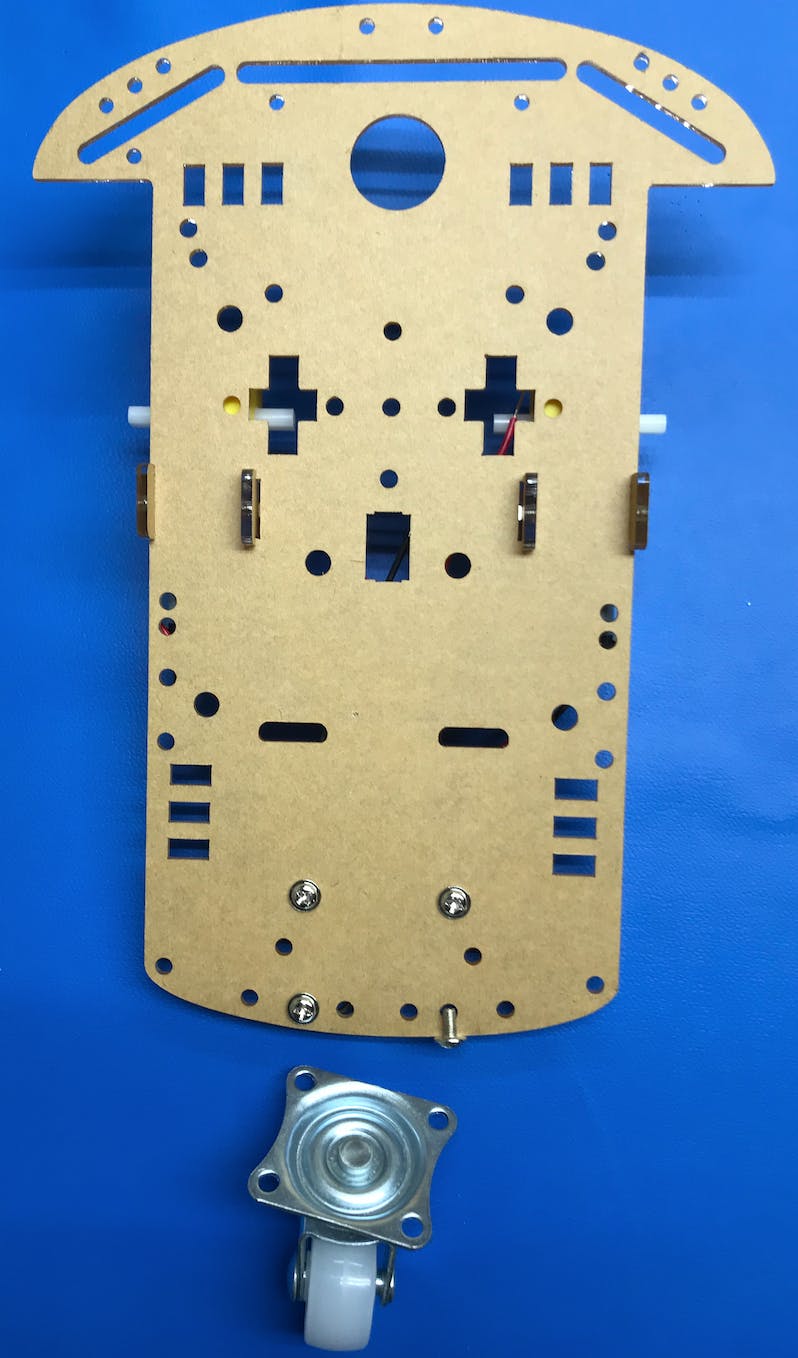
翻轉底盤后,將另外兩個外部緊固件靠近電機并使用螺栓固定。螺栓應該從外到內。螺母應從機箱內部安裝。
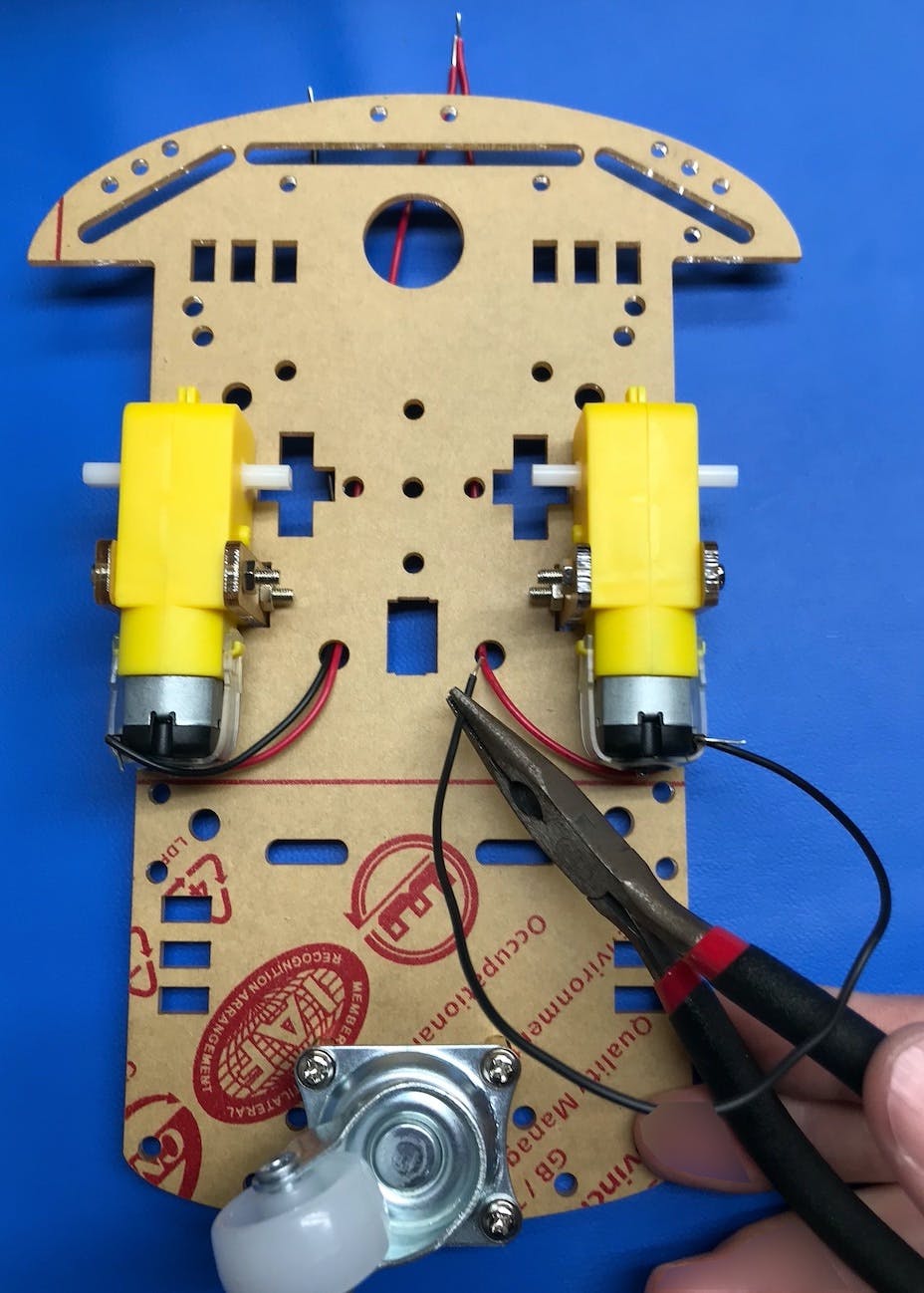
將旋轉輪安裝到底盤背面。
將電機線帶到底盤頂部并連接兩個電機輪。
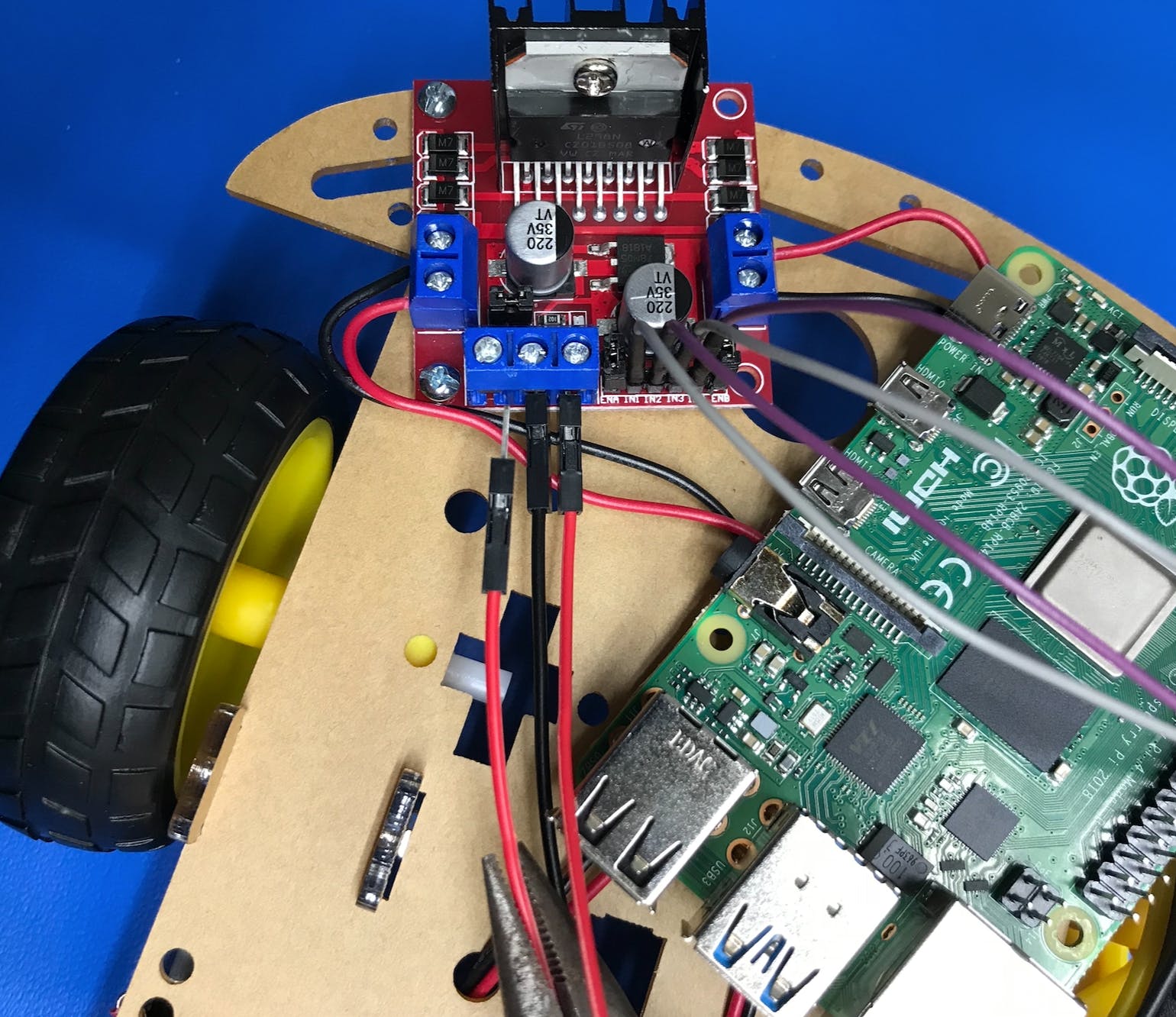
將 L298N 電機驅動控制器固定在機箱頂部。圖片顯示 L298N 板固定在機箱左前方。后來,我意識到把它放在我的項目的右上角會更有意義(這樣我將來會有更多的空間來添加額外的設備,比如相機、距離傳感器等)。隨意將其放置在對您的項目更方便的任何地方。
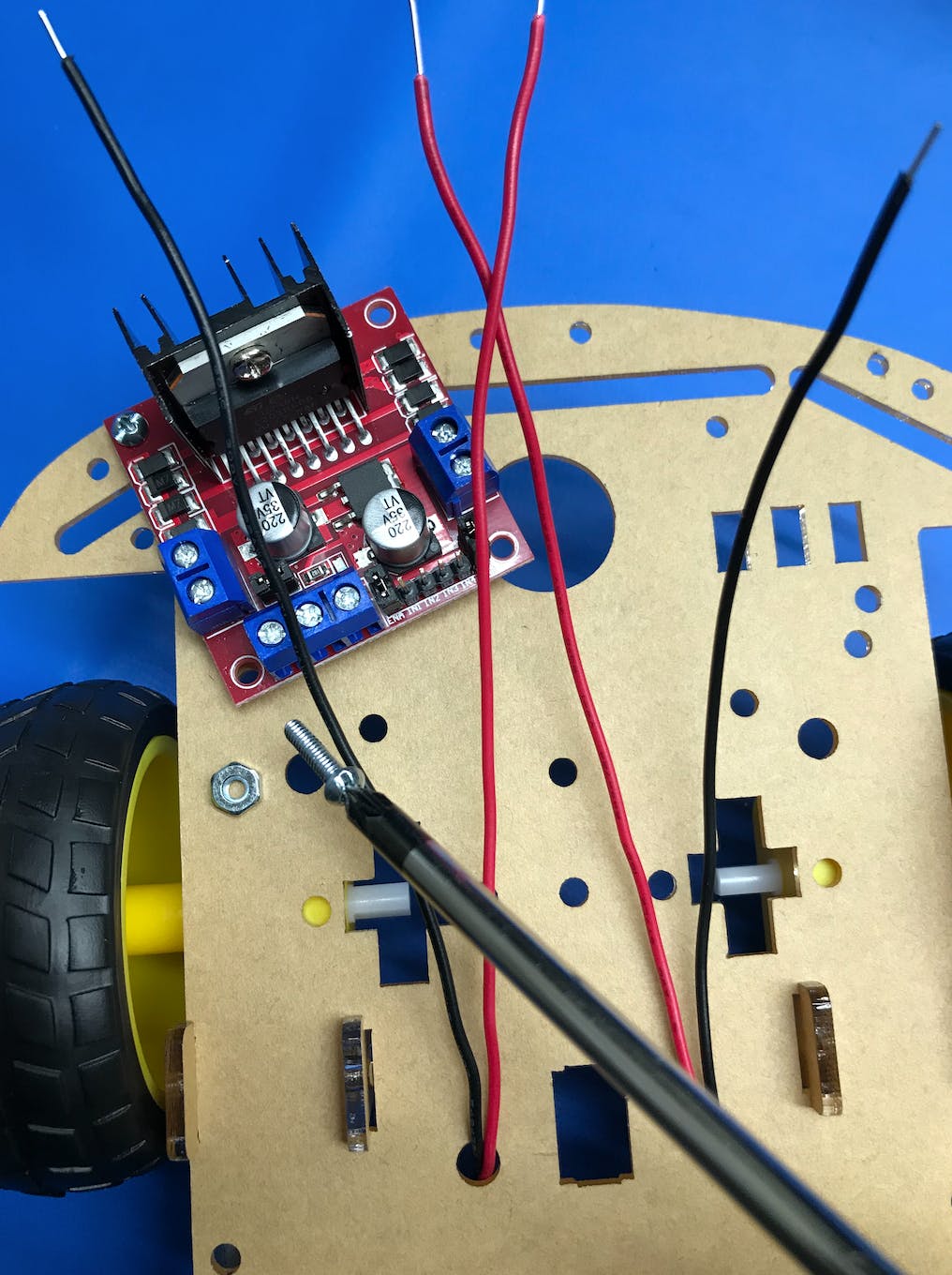
電機極性
黑線和紅線與 L298N 控制器的連接將定義通電時電機是向前驅動還是向后驅動(極性)。如果您的任何車輪向錯誤的方向旋轉,請交換 L298N 控制器上的黑色和紅色線位置,并重復本節中描述的所有步驟。
將左側電機線連接到 L298N 控制器左側的連接器,將右側電機線連接到右側,如圖所示。左側電機線應連接到 MOTOR A(OUT1 和 OUT2),右側電機線應連接到 MOTOR B(OUT3 和 OUT4)
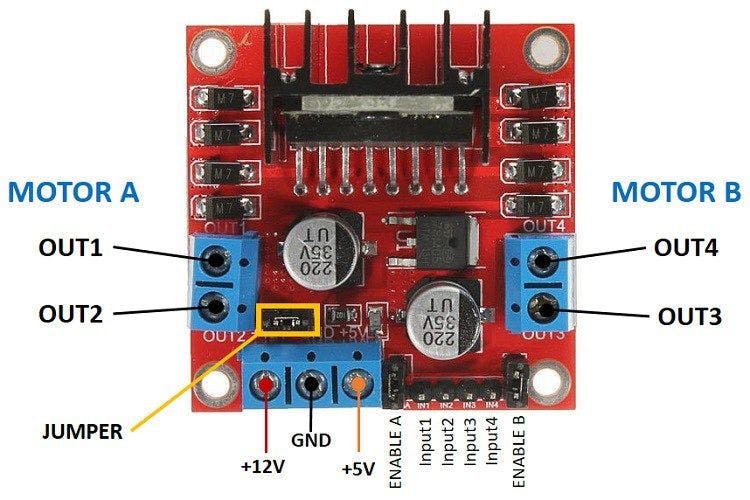
在我們的例子中,我們將左側電機的黑線連接到 OUT 1,將左側電機的紅線連接到 OUT2。右側電機的紅線連接到 OUT3,右側電機的黑線連接到 OUT4。
你的可能不一樣。完成整個組裝后,嘗試對機器人進行編碼以繼續前進。假設您注意到您的左側電機正在以正確的方向運行,但右側電機正在向后驅動。在此示例中,機器人將順時針旋轉而不是向前移動。在這種情況下,您應該保持 OUT1 和 OUT2(左)不變,但交換 OUT3 和 OUT4(右)。嘗試更改設置,直到您的電機極性正確。
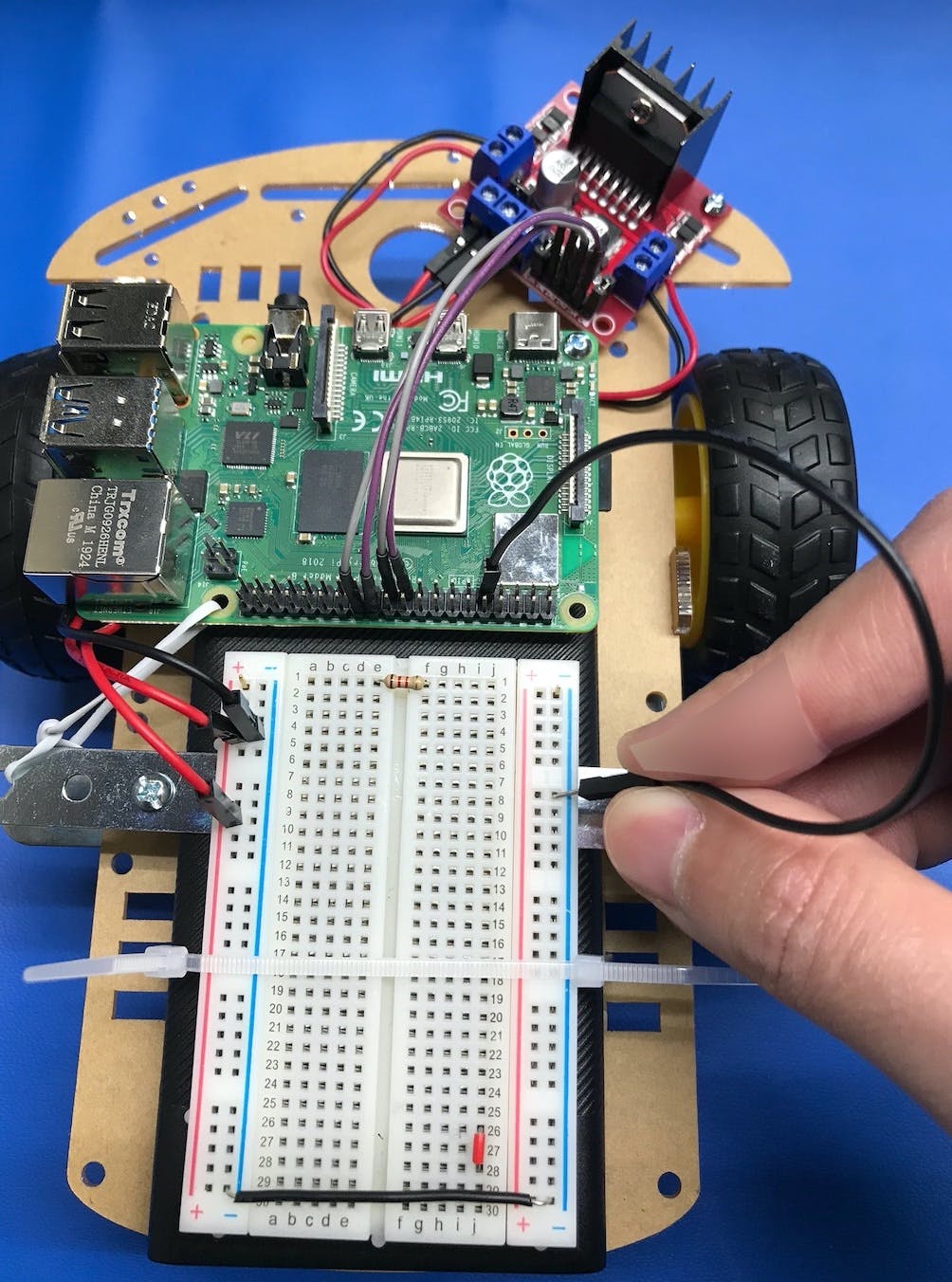
將 L298N 電機驅動器控制器連接到您的 Raspberry Pi
本項目中使用的 L298N 板需要連接到樹莓派。其他板的連接方式可能不同,有些板可以簡單地作為 HAT 放置在 Raspberry Pi GPIO 引腳上。請務必查看您的電路板的文檔,看看是否是這種情況。
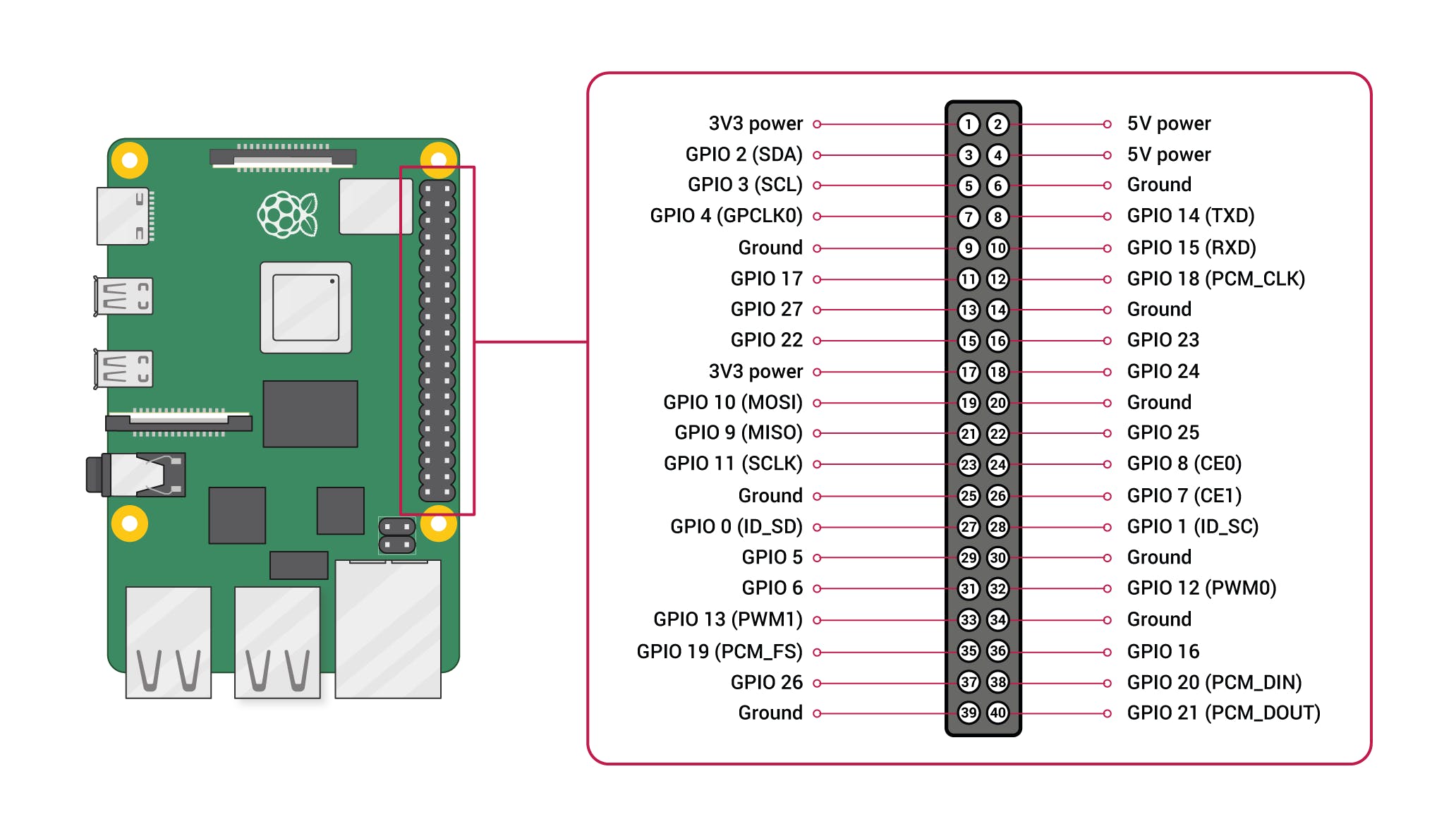
在這里使用的板上有標記為In1 、In2 、In3和In4的引腳。您使用 Pi 上的哪些 GPIO 引腳取決于您;在這個項目中,已經使用了GPIO 7 、8 、9和10 。如果您使用不同的 GPIO 引腳,您還需要更新blupants.json文件以反映您的選擇并重新啟動 blupants 服務。查看“調整”部分了解更多詳情。
使用四個母對母跳線將 Raspberry Pi GPIO 引腳連接到電機控制器板上的引腳。
- GPIO pin7連接到In1
- GPIO pin8連接到In2
- GPIO pin9連接到In3
- GPIO pin10連接到In4
將 L298N 和 Raspberry Pi 連接到移動電源
在該項目中,我們使用一個經濟實惠的移動電源為 Raspberry Pi 和 L298N 板以及電機供電。您可能想探索其他選項,例如官方Raspberry Pi 項目頁面的“制作您自己的移動電源”中顯示的選項。
在這個項目中,我們使用 2 條公對公紅色跳線和 1 條公對公黑色跳線。然后連接到 L298N 板上的 +12V、GND 和 +5V 端口,如下圖所示。
將紅色跳線連接到“+”電源軌,將黑色跳線連接到面包板上的“-”電源軌。
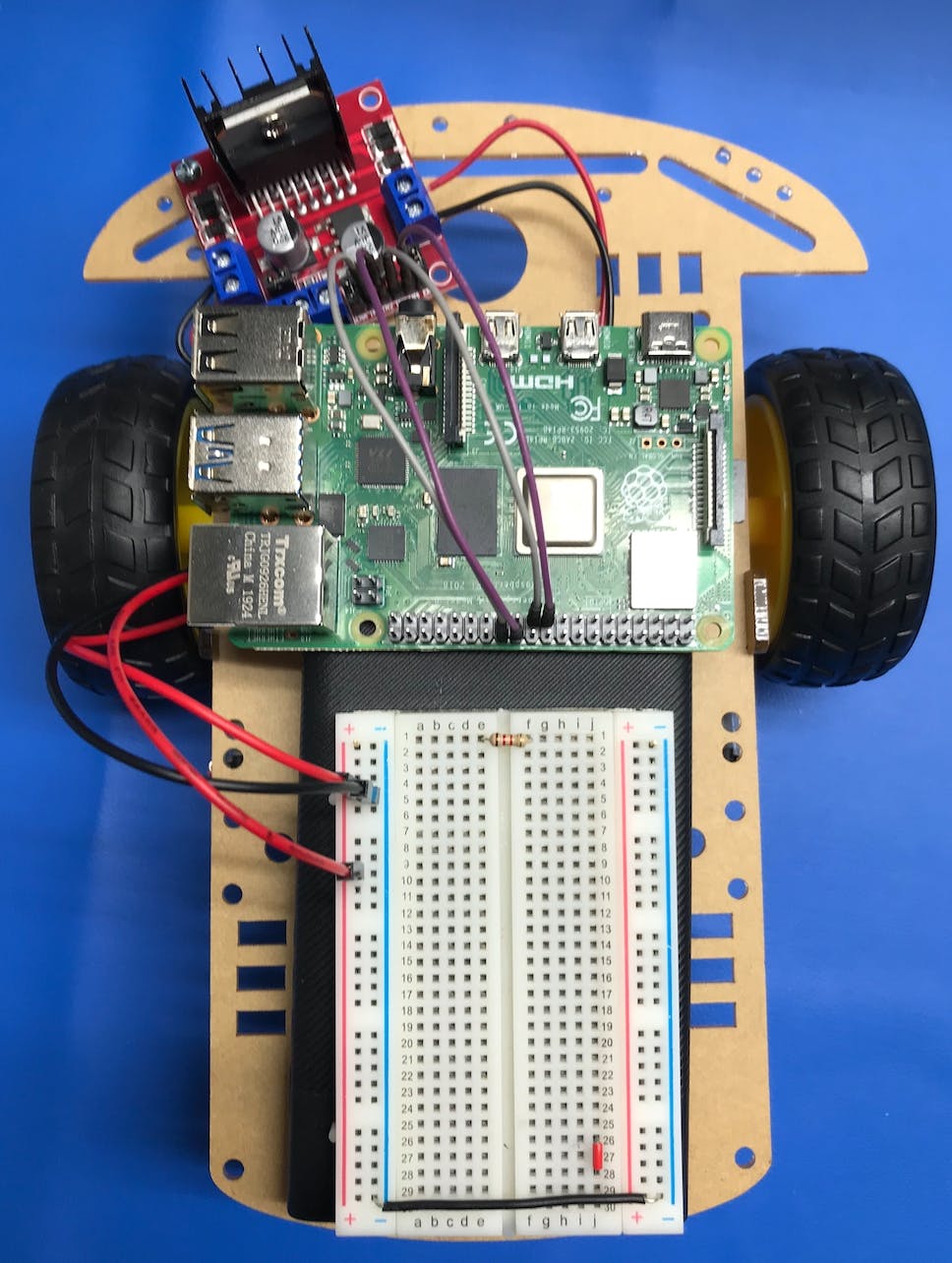
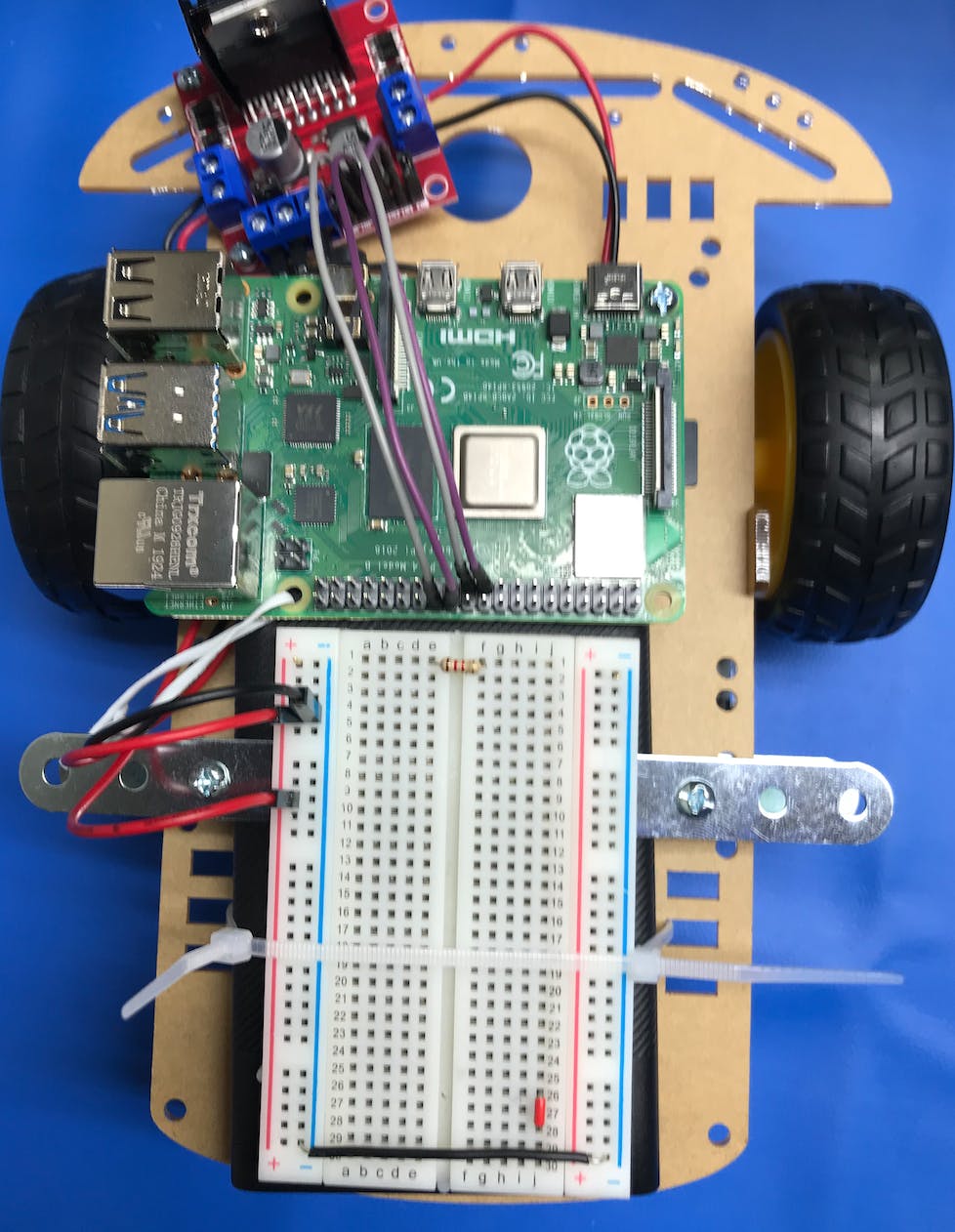
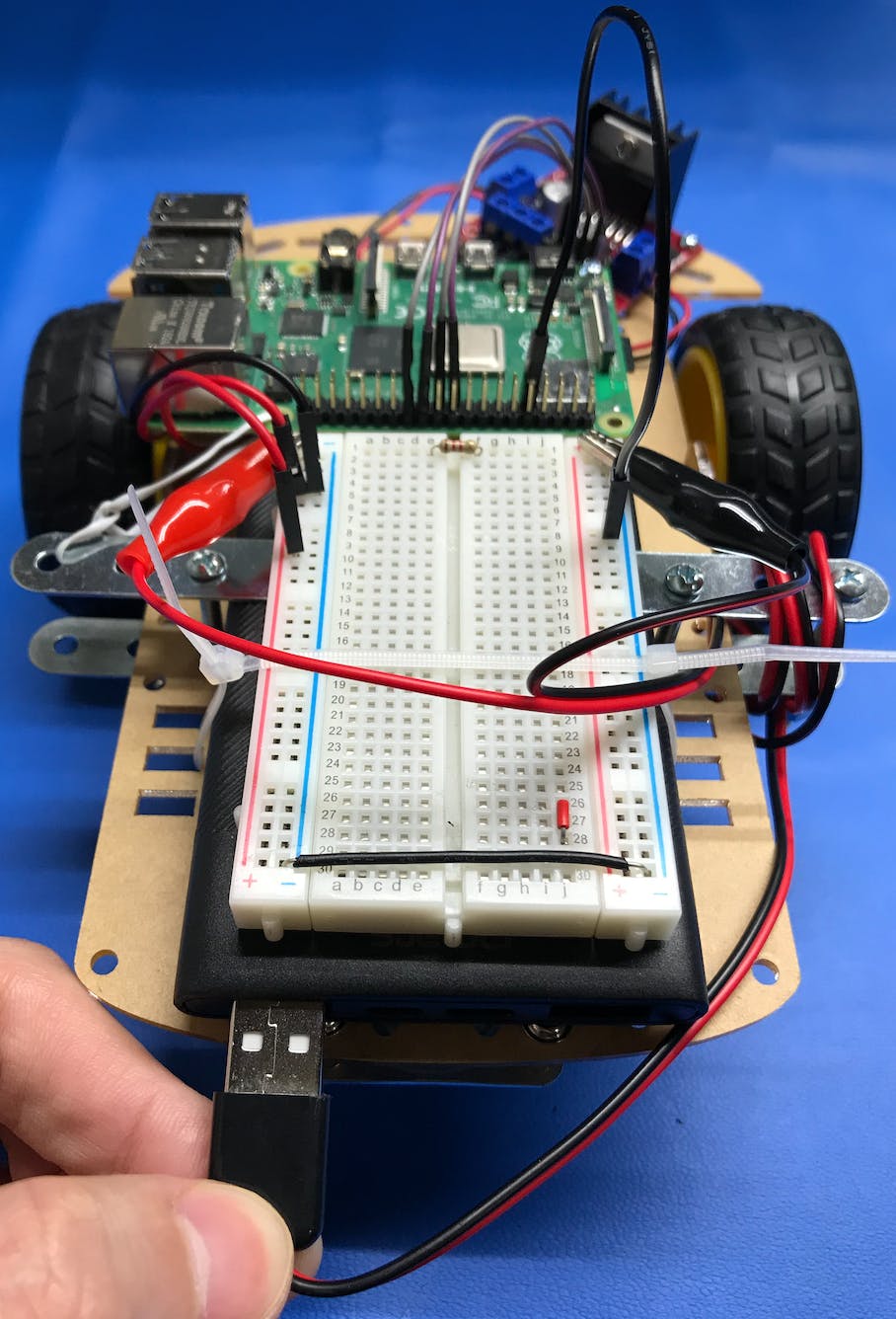
現在電源接線已完成,讓我們將移動電源(電池)放在機箱頂部,但在 Raspberry Pi 和面包板下方。
在這個項目中,修補板用于將移動電源固定到機箱上。您可能需要使用不同的方法(膠帶、螺栓和螺母、電纜扎帶等)。
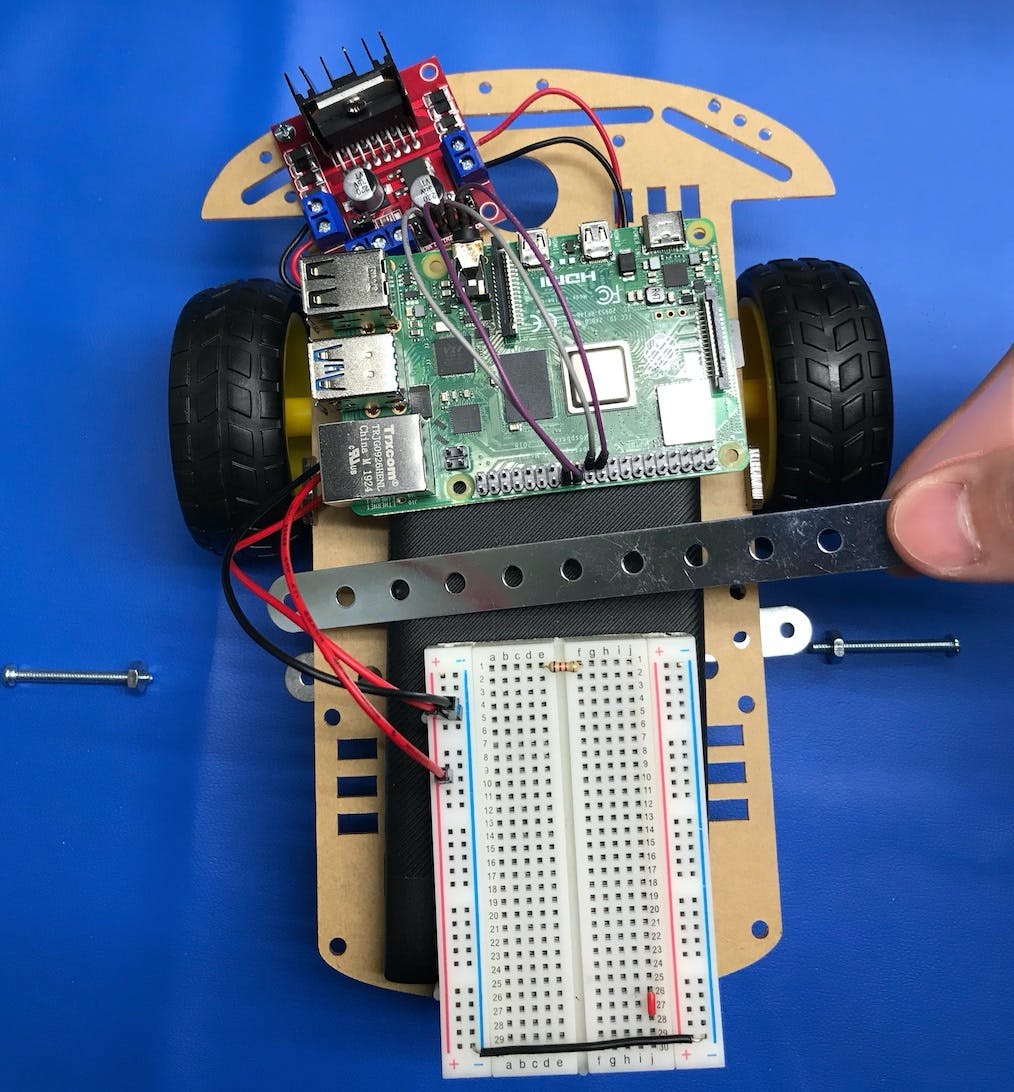
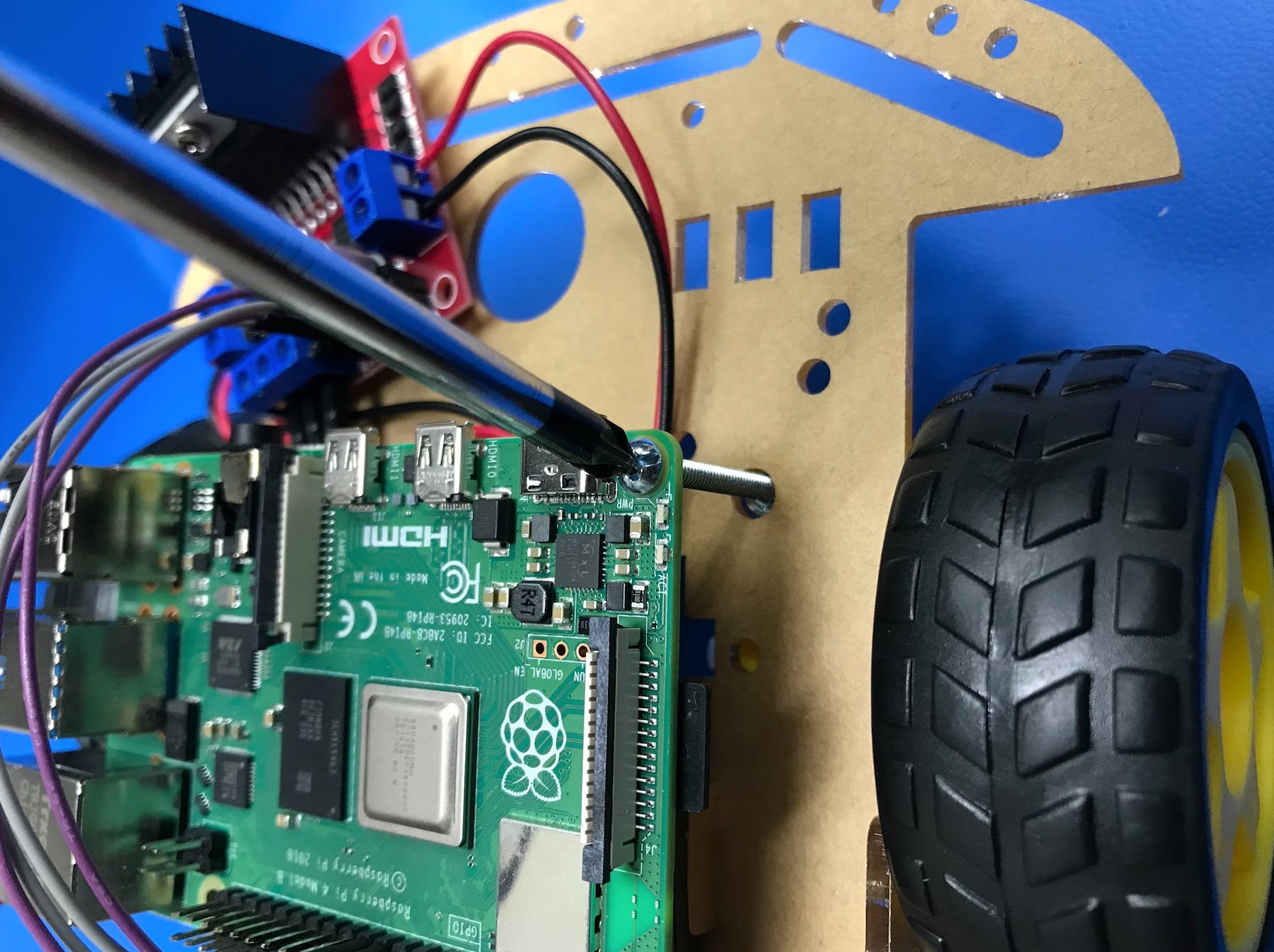
Raspberry Pi 使用螺栓和螺母固定在底盤上,還有一些電纜扎帶將其固定在修補板上。
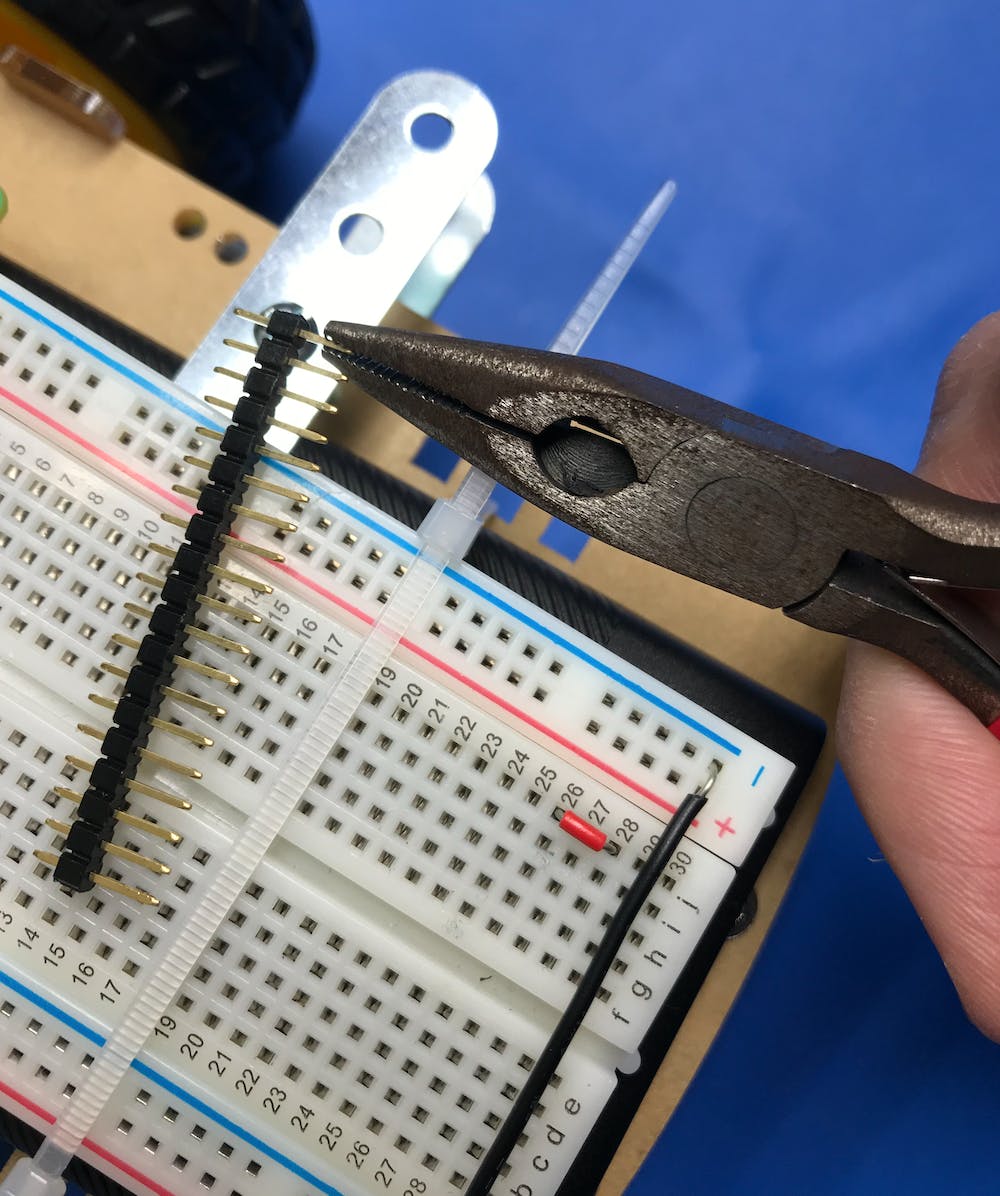
電纜扎帶用于將面包板固定到底盤上
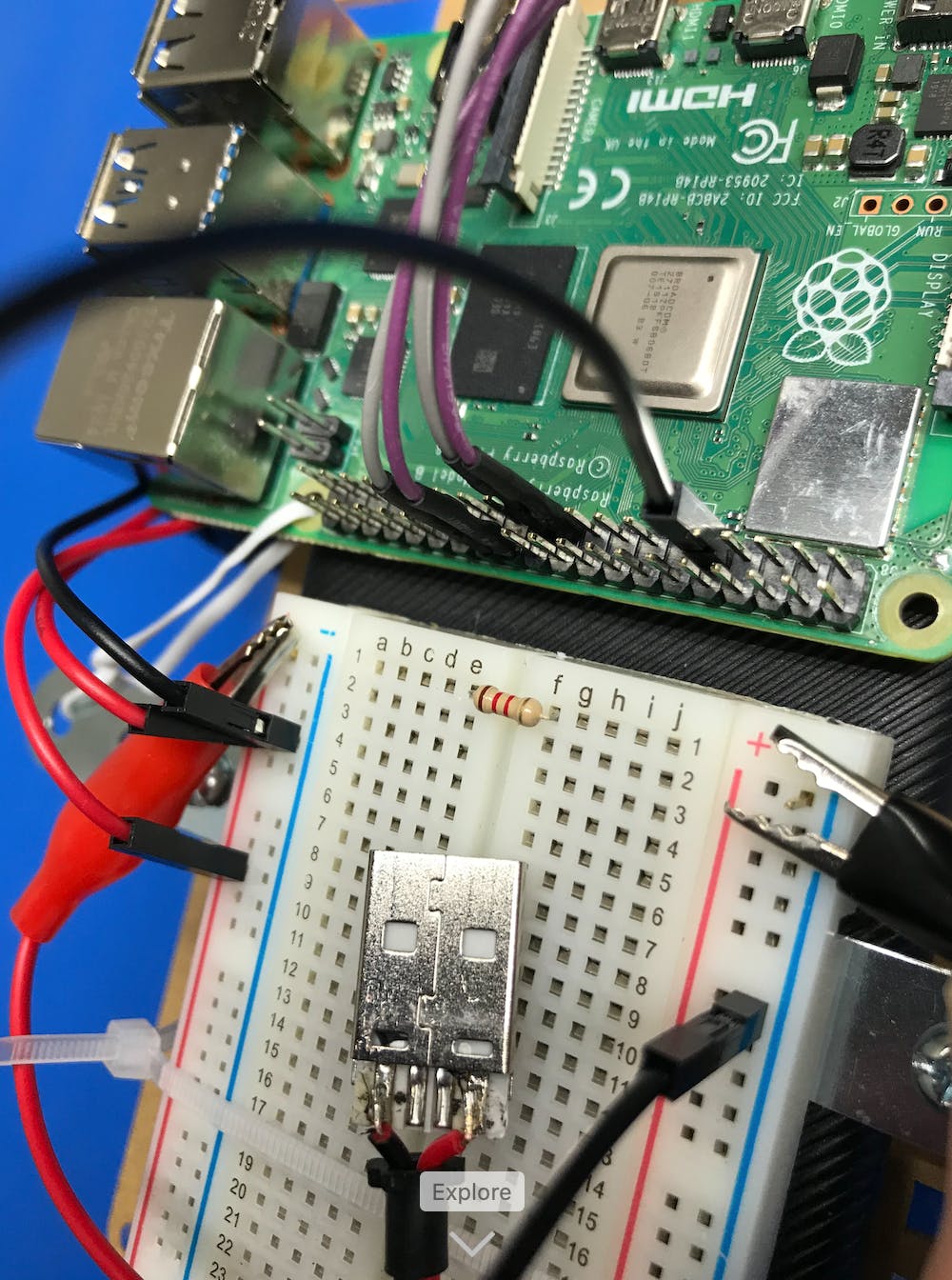
要將電源連接到面包板“+”和“-”導軌,請使用跳針將 USB 鱷魚夾連接到導軌。
要記住的一件非常重要的事情是為所有電路板和設備使用一個共同點。因此,請確保您還將 Raspberry Pi GND 品脫連接到面包板上的“-”電源軌。您將需要使用男性對女性(最好是黑色)來做到這一點。
請注意,兩個負極 (-) 電源軌通過面包板底部的黑色跳線連接。
將 USB 紅色鱷魚夾連接到“+”導軌,將黑色鱷魚夾連接到面包板上的“-”導軌。
*注意:我只有 USB 轉鱷魚夾。更好的選擇是使用 USB 調試電纜,因為它們更安全且更容易連接到面包板。您只需將紅色和黑色公對公跳線連接到 TTL 連接器。以下是 USB 調試電纜的兩種經濟實惠的選擇:
將USB端連接到移動電源,檢查L298N板是否通電。如果不是,請檢查您的接線。
通過將 USB-C 電纜連接到移動電源,打開 Raspberry Pi 4 板。如果您使用的是 Raspberry Pi 3 或 Zero,請使用 Micro USB 轉 USB-A 并將其連接到移動電源(本教程中建議的移動電源有 2 個 USB-A 輸出端口和 1 個 USB-C 輸入/輸出端口)。
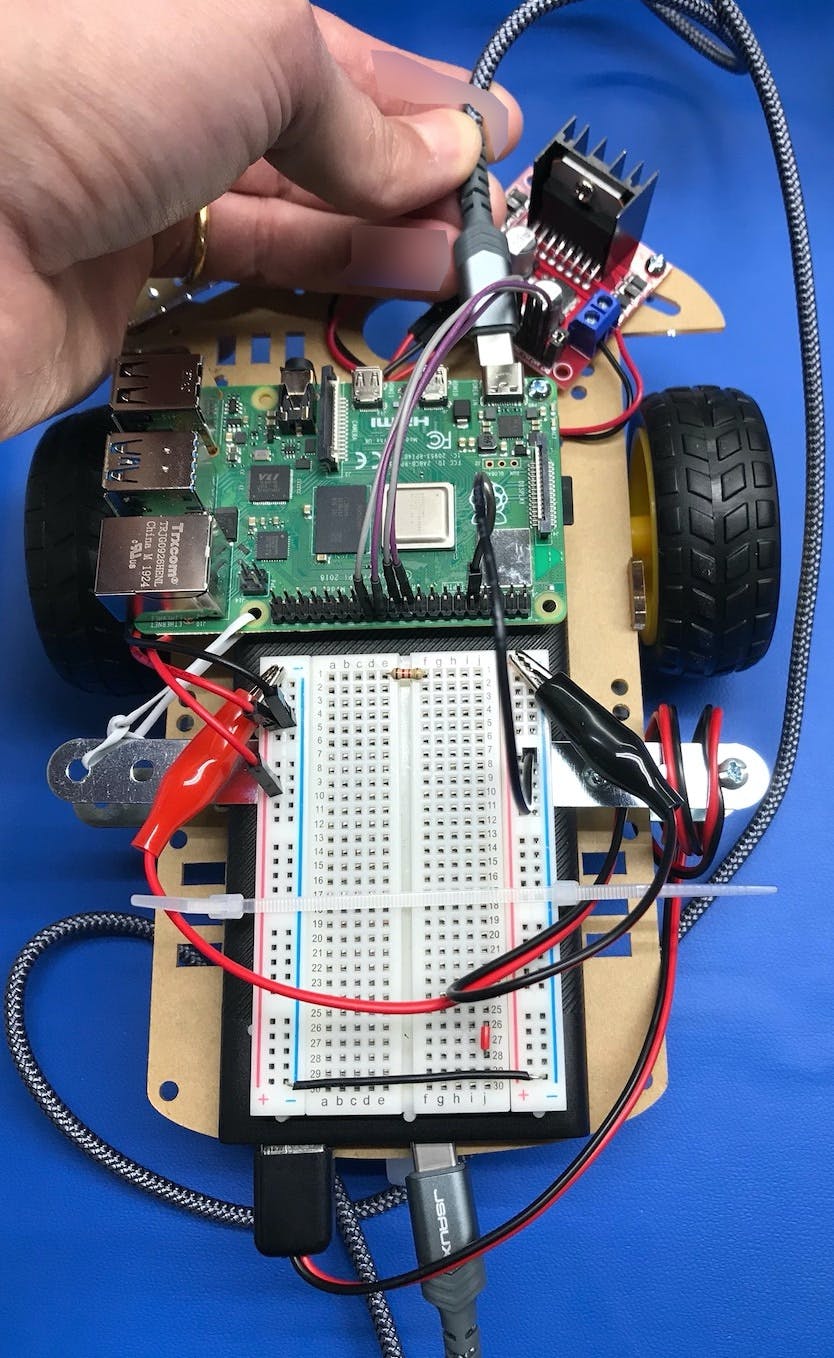
給機器人上電后,在我們最終開始編碼之前還有最后一步:將機器人連接到 WiFi 網絡。
將樹莓派連接到 WiFi
請參閱官方Raspberry Pi 文檔,了解如何將機器人連接到 WiFi。您可以在此處找到非常詳細的文檔。您需要做的就是確保將機器人(運行 BluPants SD 卡映像)和瀏覽器(臺式機、平板電腦或手機)連接到同一個 WiFi 網絡,這樣您就可以使用BluPants Studio對機器人進行編程。
編碼時間!
打開 Raspberry Pi 并連接到 WiFi 后,打開瀏覽器并訪問http://blupants.org。確保您用來瀏覽的計算機也連接到您連接 Raspberry Pi 的同一個 WiFi 網絡。
在“Robot”下拉菜單(右下角)中,選擇您的 Raspberry Pi 的 WiFi IP 地址,然后單擊“Play”:
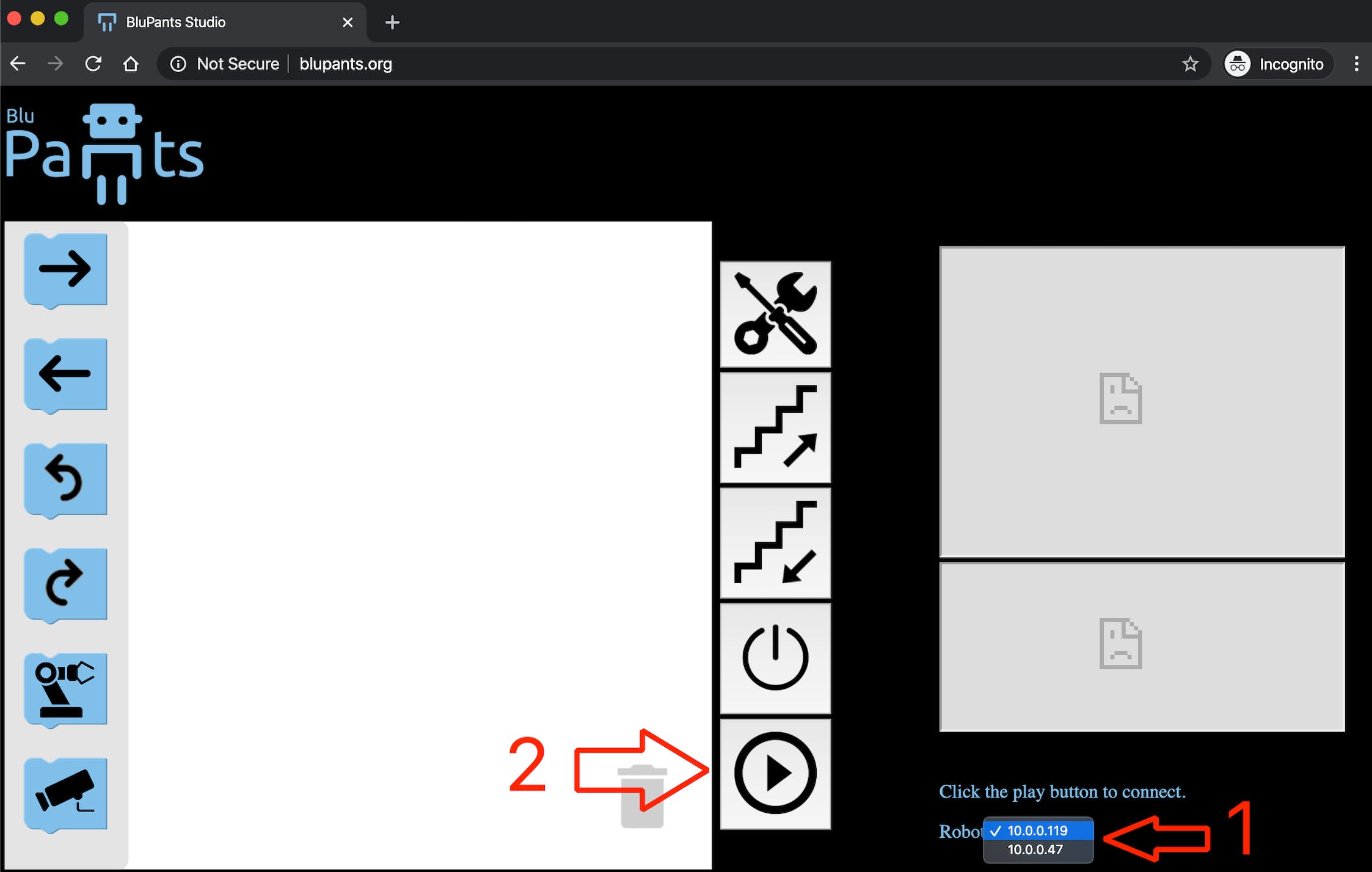
在此示例中,Raspberry Pi WiFi 地址為“10.0.0.119”。如果您看不到任何 IP 地址,請嘗試重新加載頁面,或打開和關閉瀏覽器。如果仍然無法連接,請參閱“BluPants 連接故障排除”部分。
現在您已連接,拖放一兩個“向前移動”命令塊,然后單擊“播放”執行它。
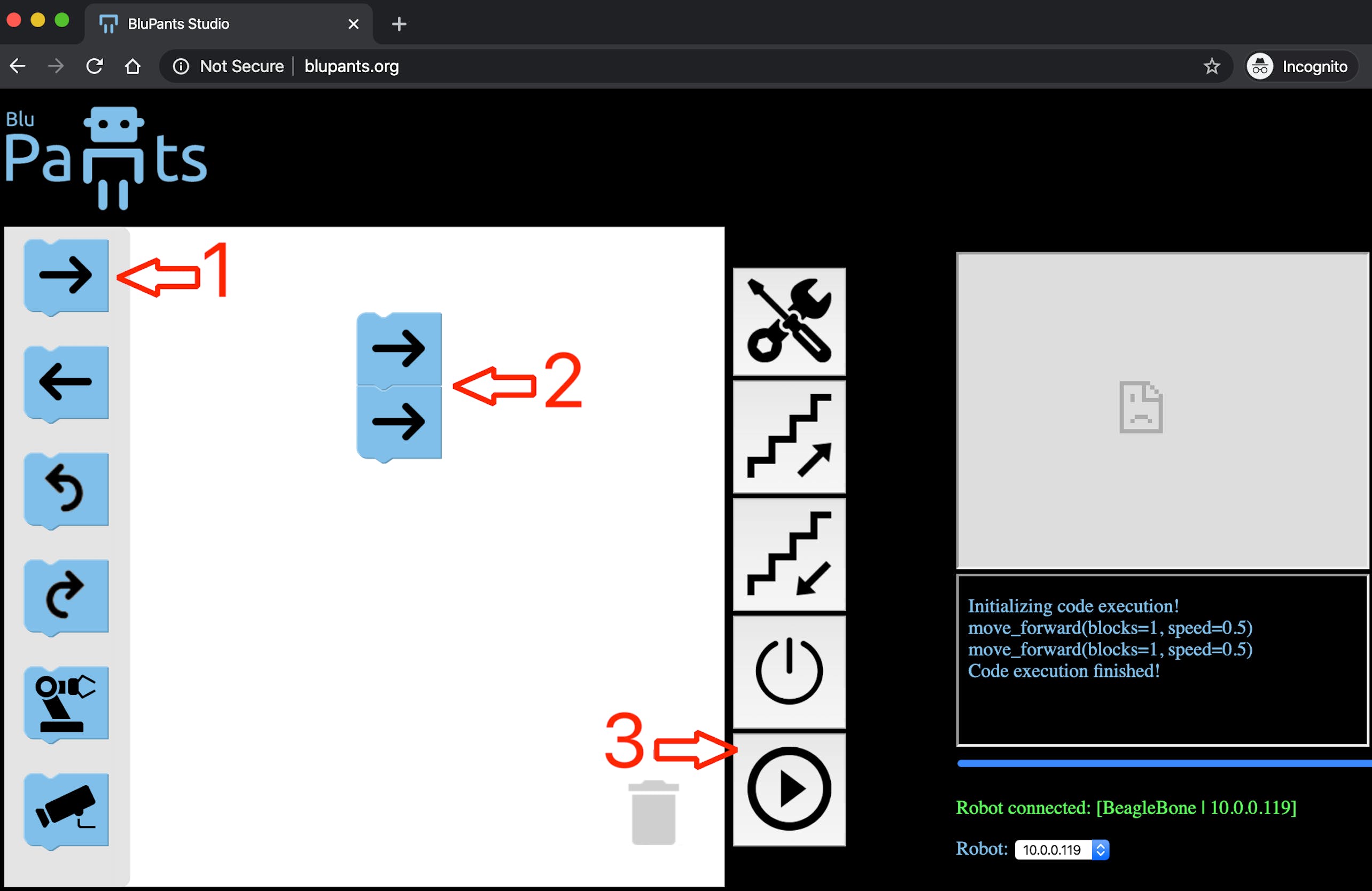
如果電機未按所需方向運行,則將紅線和黑線連接反轉以恢復極性并再次運行測試。查看下一節了解更多詳情。為了克服它,需要調整。我們希望從以下位置更改默認值:
"raspberrypi":
{
"motor":
{
"turn_right_period": 0.005,
},
}
類似于:
"raspberrypi":
{
"motor":
{
"turn_right_period": 0.004,
},
}
您可以做的另一件事是,例如,您可能希望機器人在執行“move_forward()”命令時進一步移動。為此,您需要做的就是增加默認值
"block_length": 0.5,
至
"block_length": 0.9,
您還可以補償物理問題,例如一個電機運行速度比另一個電機快(這會阻止機器人直線移動)。
假設您希望電機 2(右側的電機)運行速度慢 20%。為此,您將 duty_ratio 的第二個值從 1.0 更改為 0.8。
原始設置:
"raspberrypi":
{
"motor":
{
"duty_ratio": [1.0, 1.0, 1.0, 1.0],
},
}
右側電機運行速度慢 20% 的設置:
"raspberrypi":
{
"motor":
{
"duty_ratio": [1.0, 0.8, 1.0, 1.0],
},
}
隨意編輯文件并測試您的代碼,直到您獲得所需的準確性。如果由于某種原因,您破壞了 json 文件并且機器人不再工作,只需從github 下載原始副本。
wget https://raw.githubusercontent.com/blupants/blupants/master/src/python/blupants/blupants.json
恢復損壞的blupants.json文件后,您可能需要重新啟動服務。要重新啟動服務,請打開命令提示符,然后運行:
sudo service blupants restart
如果您需要任何進一步的幫助,請隨時在本文中添加任何評論。
BluPants 連接故障排除
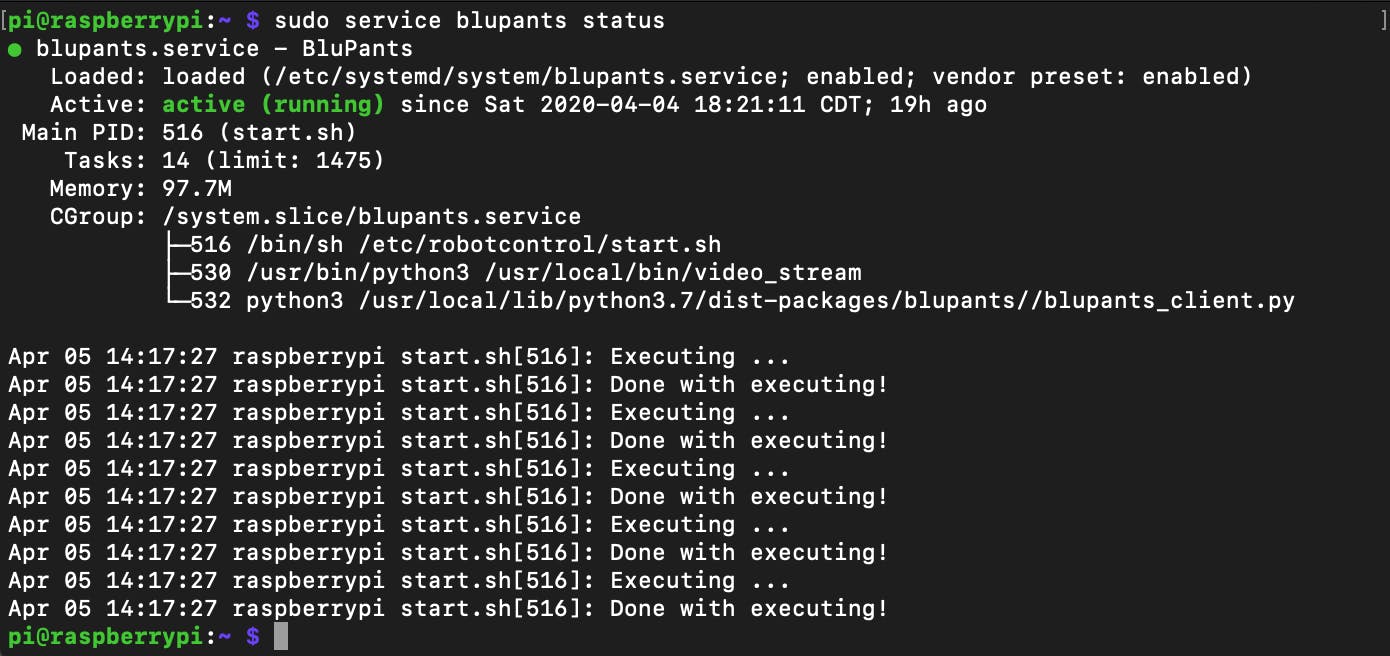
如果您無法將瀏覽器連接到 Raspberry Pi,請確保您的 BluPants 服務正在運行。登錄到您的 Raspberry Pi(默認憑據是用戶:pi,密碼:raspberry)并打開命令提示符。然后運行命令:
sudo service blupants status
預期的結果應該是這樣的:
如果需要重啟服務,可以嘗試:
sudo service blupants restart
并再次檢查狀態。確認服務正常運行后,在瀏覽器上訪問http://blupants.org并嘗試再次連接到您的 Raspberry Pi 機器人。
或者,您可以嘗試直接在 URL 上提供您的 Raspberry Pi WiFi IP 地址。為了手動獲取您的 WiFi IP 地址,請從您的 Raspberry Pi 命令外殼運行以下命令:
ifconfig wlan0
你應該得到類似的東西:
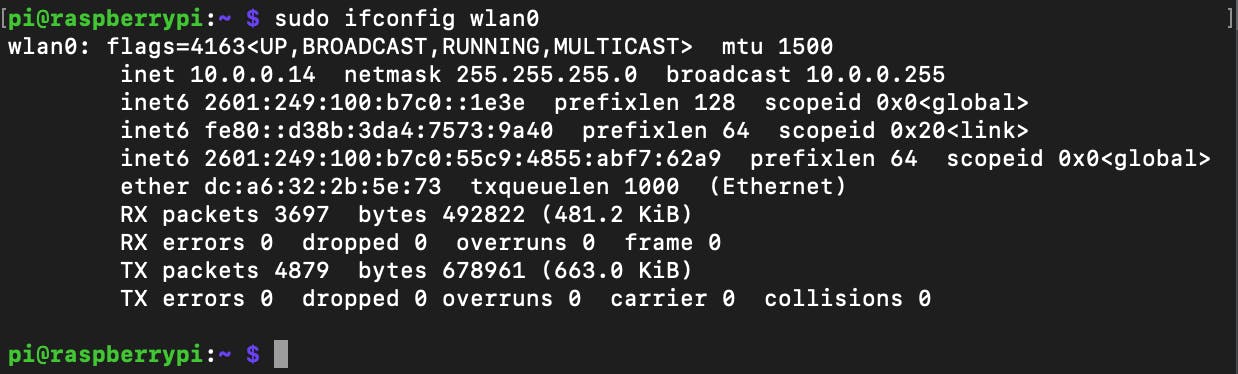
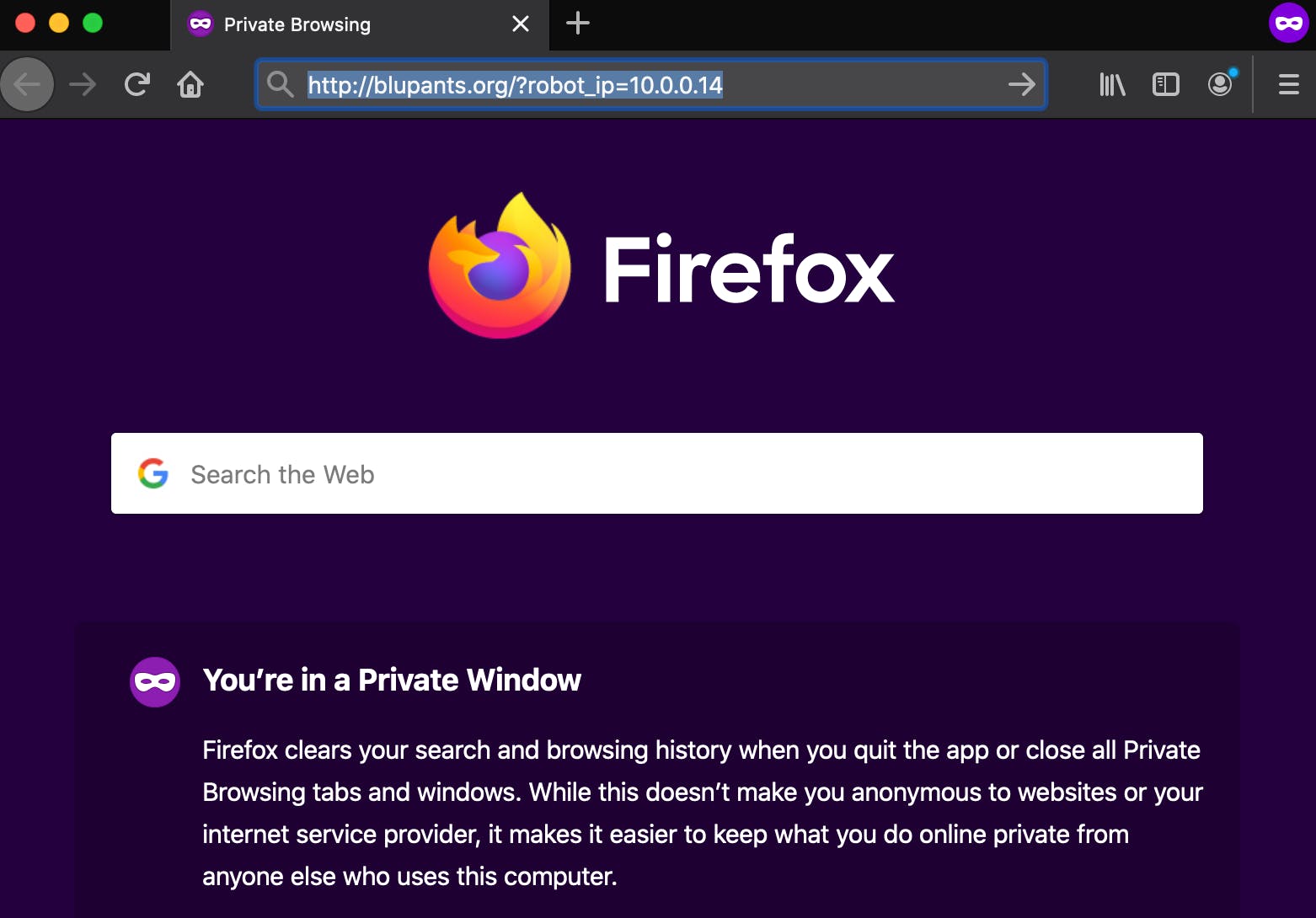
IP 地址在第三行 (inet) 上顯示為“10.0.0.14”。您的 IP 很可能會有所不同。現在我們知道了我們的 IP 地址,我們可以像這樣直接在瀏覽器 URL 上使用它:
http://blupants.org/?robot_ip=10.0.0.14
確保將“10.0.0.14”替換為您自己的 IP 地址并將其粘貼到瀏覽器地址欄中。打開頁面并單擊“播放”按鈕進行連接。
如果您需要任何進一步的幫助,請在本文中添加任何評論,我們將為您提供幫助。在Twitter 上關注我們以隨時關注所有新版本。爪教程是第一次擴展基本 MVP 機器人的好選擇。您還可以按照本教程向您的機器人添加距離傳感器和/或按照本教程向其添加相機。
將來,我們將涵蓋機器學習、文本到語音、使用 OpenCV 4 的計算機視覺等主題。所有這些內容已經原生包含在您今天剛剛刷入 micro SD 卡的 BluPants 圖像中。
您可能想進一步探索它并自己嘗試新事物。如果您有這種感覺,請嘗試自己構建更多東西。BluPants 是一個旨在讓您邊做邊學的平臺。如果您想給我們留言,請隨時添加評論和/或直接與我們聯系。
下次見!
Robot4() {
return Humans++;
}
- 使用Raspberry PI和open CV進行圖像處理
- 使用Beaglebone和BluPants進行編碼
- 使用AlphaBot2-Pi和BluPants進行編碼
- 通過USB對Raspberry Pi進行編程
- Arduino和Raspberry Pi平臺進行編碼
- 使用ROS和Raspberry Pi進行Bittle遠程操作
- 使用Raspberry Pi進行汽車診斷
- Raspberry Pi和你的倉鼠進行股市交易
- 使用Raspberry Pi和Arduino進行花卉監測
- 可視頻直播的Raspberry Pi網絡控制機器人 14次下載
- 《愛上Raspberry Pi》中譯版-電子書籍.pdf 0次下載
- Instant Raspberry Pi Gaming 6次下載
- Raspberry_Pi詳解 16次下載
- raspberry_pi各版本差別 0次下載
- Learn Raspberry Pi Programming with python 0次下載
- 5分鐘內將Raspberry Pi Pico變成簡單的示波器+波形發生器 2318次閱讀
- 基于Raspberry Pi 5的蜂窩物聯網項目 1312次閱讀
- 使用Raspberry Pi Pico W和MicroPython開發物聯網應用 2180次閱讀
- 用于測試項目的4個最佳樹莓派Raspberry Pi模擬器 6823次閱讀
- 如何使用Raspberry Pi使熱水浴缸變得智能和遠程操作 1985次閱讀
- 如何通過Raspberry Pi設置CE電流監視器 2342次閱讀
- 基于樹莓派產品 Raspberry Pi微控制器板的優缺點 2984次閱讀
- 基于Raspberry Pi Pico開發先進的家庭自動化系統 3004次閱讀
- 基于FONA通過UART與Raspberry Pi進行通訊的方案介紹 2257次閱讀
- 微雪電子ZeroW| Raspberry Pi ZeroW主板簡介 2618次閱讀
- 微雪電子Raspberry Pi 3 Model主板簡介 3146次閱讀
- 微雪電子Raspberry Pi 3 Model擴展板簡介 1667次閱讀
- 利用Raspberry Pi構建存儲和虛擬化時間序列數據 952次閱讀
- 一文了解Raspberry Pi 4各項性能跑分 3w次閱讀
- 視覺享受!用Raspberry Pi實現圣誕樹燈光秀 8344次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論