 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
人工智能技術(shù)是與多門基礎(chǔ)學(xué)科聯(lián)系緊密、相互促進(jìn)相互發(fā)展的前沿技術(shù),是集計(jì)算機(jī)、物理學(xué)、生理學(xué)、控制技術(shù)、傳感器技術(shù)等于一體的高新技術(shù)產(chǎn)業(yè)。人工智能技術(shù)的應(yīng)用領(lǐng)域也越來(lái)越廣泛,除了傳統(tǒng)的工業(yè)領(lǐng)域,人工智能技術(shù)的應(yīng)用也涉及到軍事、娛樂、服務(wù)、醫(yī)療等領(lǐng)域“。
隨著機(jī)器人技術(shù)的不斷發(fā)展,人們對(duì)機(jī)器人的要求也越來(lái)越高,機(jī)器人的智能化已成為當(dāng)今的熱點(diǎn)。智能小車作為一種四輪驅(qū)動(dòng)的智能機(jī)器人,它行動(dòng)靈活、操作方便,車上可集成各種精密傳感器數(shù)據(jù)處理模塊,其避障功能保證了智能小車在行進(jìn)過程中行進(jìn)方向的自行調(diào)節(jié),避免發(fā)生碰撞、碰擦,是智能小車的重要組成部分。目前,智能小車大多采用單個(gè)傳感器實(shí)現(xiàn)單面避障,但單面避障存在著固有的缺陷,如:障礙物探測(cè)緩慢、避障成功率較低等。由此,設(shè)計(jì)了一種能全方位避障的智能小車系統(tǒng),采用紅外單點(diǎn)避障與超聲波雙路避障相結(jié)合的模式,可實(shí)現(xiàn)多面自動(dòng)探測(cè),并實(shí)現(xiàn)全方位避障,有效提高了避障的成功率和效率。
1系統(tǒng)設(shè)計(jì)
設(shè)計(jì)的避障系統(tǒng)采用紅外單點(diǎn)避障與超聲波雙路避障相結(jié)合的模式,以實(shí)現(xiàn)對(duì)障礙物的全方位有效避障。為此,在小車前端中央設(shè)置一個(gè)紅外避障傳感器,用于探測(cè)小車前方障礙物,再在小車前端兩側(cè)設(shè)置左右兩個(gè)超聲波避障傳感器,他們分別探測(cè)小車前方左右兩側(cè)障礙物,有效的擴(kuò)大了探測(cè)范圍,從而實(shí)現(xiàn)了小車的全方位避障。
本系統(tǒng)利用多模塊協(xié)調(diào)配合,使其具有較高自適應(yīng)能力。硬件以需求為基礎(chǔ),選擇了合適的模塊,總體模塊中包含:電源模塊,紅外傳感模塊,超聲波傳感模塊,電機(jī)驅(qū)動(dòng)模塊,Arduino模塊等。系統(tǒng)整體框圖如圖1所示。
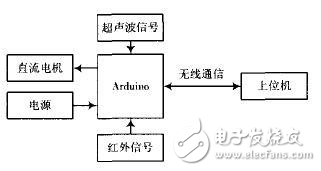
圖1系統(tǒng)硬件結(jié)構(gòu)圖
1.1 Arduino模塊
設(shè)計(jì)中采用Arduino duemilanove作為核心控制模塊,Arduino是一款便捷靈活且十分方便上手的開源電子原型平臺(tái),能通過各種各樣的傳感器來(lái)感知環(huán)境,通過燈光、電機(jī)和其他的裝置來(lái)反饋、影響環(huán)境。
Arduino duemilanove包括以下幾個(gè)部分:一個(gè)9 V DC輸入,一個(gè)USB接口,14個(gè)數(shù)字IO口,6個(gè)模擬IO口,1個(gè)5 V DC輸出和一個(gè)3.3 V DC輸出。它的核心是一片Atmega 328單片機(jī)。
1.2電機(jī)模塊
小車采用雙直流電機(jī)驅(qū)動(dòng)方式,通過控制左右兩個(gè)直流電機(jī)來(lái)控制小車轉(zhuǎn)動(dòng)轉(zhuǎn)向,電機(jī)模塊如圖2所示,直流電機(jī)采用直流電機(jī)驅(qū)動(dòng)芯片L298N。
L298N內(nèi)部包含4通道邏輯驅(qū)動(dòng)電路,是一種二相和四相電機(jī)的專用驅(qū)動(dòng)器,即內(nèi)含二個(gè)H橋的高電壓大電流雙全橋式驅(qū)動(dòng)器,接收標(biāo)準(zhǔn)TTL邏輯電平信號(hào),可驅(qū)動(dòng)46V、2A以下的電機(jī),正好可以滿足小車的左右直流電機(jī)的驅(qū)動(dòng)要求。并且L289N具有過溫保護(hù)功能和較高的噪聲抑制比,故十分適用于智能小車中。
隨著機(jī)器人技術(shù)的不斷發(fā)展,人們對(duì)機(jī)器人的要求也越來(lái)越高,機(jī)器人的智能化已成為當(dāng)今的熱點(diǎn)。智能小車作為一種四輪驅(qū)動(dòng)的智能機(jī)器人,它行動(dòng)靈活、操作方便,車上可集成各種精密傳感器數(shù)據(jù)處理模塊,其避障功能保證了智能小車在行進(jìn)過程中行進(jìn)方向的自行調(diào)節(jié),避免發(fā)生碰撞、碰擦,是智能小車的重要組成部分。目前,智能小車大多采用單個(gè)傳感器實(shí)現(xiàn)單面避障,但單面避障存在著固有的缺陷,如:障礙物探測(cè)緩慢、避障成功率較低等。由此,設(shè)計(jì)了一種能全方位避障的智能小車系統(tǒng),采用紅外單點(diǎn)避障與超聲波雙路避障相結(jié)合的模式,可實(shí)現(xiàn)多面自動(dòng)探測(cè),并實(shí)現(xiàn)全方位避障,有效提高了避障的成功率和效率。
1系統(tǒng)設(shè)計(jì)
設(shè)計(jì)的避障系統(tǒng)采用紅外單點(diǎn)避障與超聲波雙路避障相結(jié)合的模式,以實(shí)現(xiàn)對(duì)障礙物的全方位有效避障。為此,在小車前端中央設(shè)置一個(gè)紅外避障傳感器,用于探測(cè)小車前方障礙物,再在小車前端兩側(cè)設(shè)置左右兩個(gè)超聲波避障傳感器,他們分別探測(cè)小車前方左右兩側(cè)障礙物,有效的擴(kuò)大了探測(cè)范圍,從而實(shí)現(xiàn)了小車的全方位避障。
本系統(tǒng)利用多模塊協(xié)調(diào)配合,使其具有較高自適應(yīng)能力。硬件以需求為基礎(chǔ),選擇了合適的模塊,總體模塊中包含:電源模塊,紅外傳感模塊,超聲波傳感模塊,電機(jī)驅(qū)動(dòng)模塊,Arduino模塊等。系統(tǒng)整體框圖如圖1所示。
圖1系統(tǒng)硬件結(jié)構(gòu)圖
1.1 Arduino模塊
設(shè)計(jì)中采用Arduino duemilanove作為核心控制模塊,Arduino是一款便捷靈活且十分方便上手的開源電子原型平臺(tái),能通過各種各樣的傳感器來(lái)感知環(huán)境,通過燈光、電機(jī)和其他的裝置來(lái)反饋、影響環(huán)境。
Arduino duemilanove包括以下幾個(gè)部分:一個(gè)9 V DC輸入,一個(gè)USB接口,14個(gè)數(shù)字IO口,6個(gè)模擬IO口,1個(gè)5 V DC輸出和一個(gè)3.3 V DC輸出。它的核心是一片Atmega 328單片機(jī)。
1.2電機(jī)模塊
小車采用雙直流電機(jī)驅(qū)動(dòng)方式,通過控制左右兩個(gè)直流電機(jī)來(lái)控制小車轉(zhuǎn)動(dòng)轉(zhuǎn)向,電機(jī)模塊如圖2所示,直流電機(jī)采用直流電機(jī)驅(qū)動(dòng)芯片L298N。
L298N內(nèi)部包含4通道邏輯驅(qū)動(dòng)電路,是一種二相和四相電機(jī)的專用驅(qū)動(dòng)器,即內(nèi)含二個(gè)H橋的高電壓大電流雙全橋式驅(qū)動(dòng)器,接收標(biāo)準(zhǔn)TTL邏輯電平信號(hào),可驅(qū)動(dòng)46V、2A以下的電機(jī),正好可以滿足小車的左右直流電機(jī)的驅(qū)動(dòng)要求。并且L289N具有過溫保護(hù)功能和較高的噪聲抑制比,故十分適用于智能小車中。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 智能避障小車運(yùn)動(dòng)控制設(shè)計(jì)與實(shí)現(xiàn) 41次下載
- 基于51單片機(jī)的避障小車
- 基于stm32單片機(jī)的紅外避障及循跡小車
- 基于單片機(jī)藍(lán)牙控制的智能避障小車控制系統(tǒng)
- 使用Arduino設(shè)計(jì)的智能小車自動(dòng)避障的接線說(shuō)明 18次下載
- 智能尋跡避障小車避障系統(tǒng)設(shè)計(jì)的資料說(shuō)明 15次下載
- 智能循跡避障小車程序 55次下載
- 基于Arduino單片機(jī)的避障小車機(jī)器人 14次下載
- 智能循跡避障小車設(shè)計(jì)與實(shí)現(xiàn) 309次下載
- 基于紅外避障的智能小車的設(shè)計(jì)_強(qiáng)彥 28次下載
- 尋跡和避障智能小車系統(tǒng)設(shè)計(jì)_李志宜 4次下載
- 基于DSP的智能小車避障系統(tǒng)設(shè)計(jì)_閆晶 3次下載
- arduino版的自動(dòng)避障小車程序 0次下載
- 紅外避障小車設(shè)計(jì)論文 0次下載
- 尋跡避障一體小車 0次下載
- 機(jī)智云開源自動(dòng)化控制篇-避障式舵機(jī)轉(zhuǎn)向系統(tǒng) 356次閱讀
- 如何制作一個(gè)智能尋路+避障的小車? 4224次閱讀
- 基于OpenHarmony系統(tǒng)和小凌派RK2206開發(fā)板的避障小車 5249次閱讀
- AGV小車監(jiān)控系統(tǒng)的組成、功能與特點(diǎn)分析 3712次閱讀
- MSP430單片機(jī)對(duì)智能小車的硬件控制設(shè)計(jì) 2672次閱讀
- 微雪電子智能車Arduino AlphaBot2簡(jiǎn)介 2275次閱讀
- 微雪電子智能車學(xué)習(xí)板配件包Arduino開發(fā)板簡(jiǎn)介 1587次閱讀
- 樹莓派4代無(wú)線視頻智能小車輕松實(shí)現(xiàn)避障循跡 9685次閱讀
- 基于MSP430單片機(jī)對(duì)智能小車的控制設(shè)計(jì) 6515次閱讀
- 基于MSP430F2274單片機(jī)對(duì)智能小車的應(yīng)用設(shè)計(jì) 1617次閱讀
- 如何解決機(jī)器人“避障”的問題 4568次閱讀
- 基于STC89C52和nRF24L01的智能小車設(shè)計(jì) 8527次閱讀
- 超聲波傳感器在智能小車避障系統(tǒng)中的應(yīng)用 1.3w次閱讀
- 什么是無(wú)人機(jī)避障技術(shù) 在消費(fèi)級(jí)無(wú)人機(jī)領(lǐng)域?yàn)槭裁椿鸩涣耍?/a> 3210次閱讀
- 基于MSP430的智能小車尋跡模塊設(shè)計(jì)方案 1.3w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費(fèi)下載
- 0.00 MB | 1491次下載 | 免費(fèi)
- 2單片機(jī)典型實(shí)例介紹
- 18.19 MB | 95次下載 | 1 積分
- 3S7-200PLC編程實(shí)例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識(shí)別和講解說(shuō)明
- 4.28 MB | 18次下載 | 4 積分
- 5開關(guān)電源原理及各功能電路詳解
- 0.38 MB | 11次下載 | 免費(fèi)
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7基于單片機(jī)和 SG3525的程控開關(guān)電源設(shè)計(jì)
- 0.23 MB | 4次下載 | 免費(fèi)
- 8基于AT89C2051/4051單片機(jī)編程器的實(shí)驗(yàn)
- 0.11 MB | 4次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費(fèi)
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費(fèi)
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費(fèi)
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33562次下載 | 免費(fèi)
- 6接口電路圖大全
- 未知 | 30320次下載 | 免費(fèi)
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費(fèi)
- 8開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21539次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537793次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191183次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183277次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138039次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論