 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
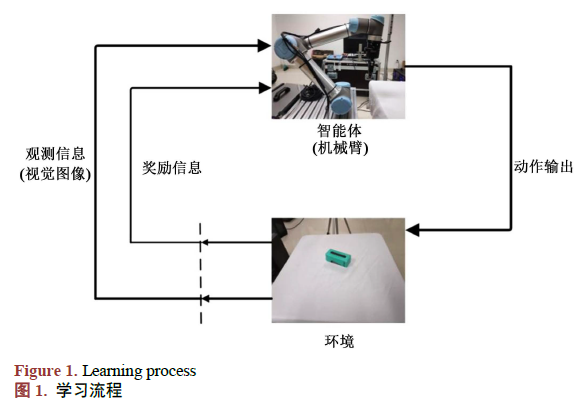
針對提高視覺圖像特征與優(yōu)化控制之間契合度的問題,本文提出一種基于深度強化學(xué)習(xí)的機械臂視覺抓取控制優(yōu)化方法,可以自主地從與環(huán)境交互產(chǎn)生的視覺圖像中不斷學(xué)習(xí)特征提取,直接地將提取的特征應(yīng)用于機械臂抓取控制。通過不斷的抓取實驗,優(yōu)化機械臂抓取策略,最終獲得優(yōu)秀的抓取策略。并且可以針對不同的抓取任務(wù)和抓取環(huán)境,學(xué)習(xí)相應(yīng)的機械臂抓取控制策略。
神經(jīng)網(wǎng)絡(luò)是人工智能研究領(lǐng)域的核心之一,其本質(zhì)是模擬人腦的學(xué)習(xí)系統(tǒng),通過增加網(wǎng)絡(luò)的層數(shù)讓機器從數(shù)據(jù)中學(xué)習(xí)高層特征。近年來,由于神經(jīng)網(wǎng)絡(luò)優(yōu)異的算法性能,已經(jīng)廣泛應(yīng)用于圖像分析、目標(biāo)檢測等領(lǐng)域。
視覺圖像提供了豐富的特征信息,可以提供某個時刻對于研究問題所需要的環(huán)境的有效狀態(tài)信息。正因為其具有的豐富的特征信息量,視覺圖像被廣泛應(yīng)用于如機器人導(dǎo)航、機械臂控制等許多應(yīng)用上。純粹基于視覺圖像的抓取控制,其質(zhì)量極大地依賴于圖像的特征提取的準(zhǔn)確性和機械臂抓取控制的動力學(xué)模型的準(zhǔn)確性。但是,傳統(tǒng)的視覺特征提取算法受環(huán)境動態(tài)變化的影響,手工提取的特征往往費時費力,很難滿足機械臂抓取控制的需求。同時,機械臂運動軌跡的求解與規(guī)劃,正逆動力學(xué)模型的建立往往也十分困難。
目前國內(nèi)外許多文章提出了不同的機械臂控制方法,近年來由于圖像識別技術(shù)的發(fā)展以及人工智能得到廣泛的運用,出現(xiàn)了將兩者結(jié)合起來用于機械臂的控制,并且取得了良好的效果。將機械臂避障路徑規(guī)劃問題置于強化學(xué)習(xí)的框架當(dāng)中,采用深度Q 學(xué)習(xí)的方法訓(xùn)練策略以規(guī)劃路徑,使得機械臂能夠在空間中存在障礙物的情況下實現(xiàn)避障抓捕。對圖像進(jìn)行了預(yù)處理并提取了目標(biāo)邊緣,結(jié)合目標(biāo)特點對提取的邊緣進(jìn)行了橢圓擬合,并對橢圓擬合偏差進(jìn)行了分析。針對常規(guī)方法設(shè)計視覺控制器的不足,基于BP 神經(jīng)網(wǎng)絡(luò)對視覺控制器進(jìn)行了設(shè)計,考慮了不同網(wǎng)絡(luò)參數(shù)和訓(xùn)練算法對網(wǎng)絡(luò)訓(xùn)練效果的影響。深入分析了機械臂特性和目標(biāo)特性,在建立機械臂、相機和目標(biāo)的運動關(guān)系的基礎(chǔ)上,基于立體視覺實現(xiàn)了對空間目標(biāo)的位姿測量,控制機械臂進(jìn)行抓取預(yù)定位。考慮立體相機的測量誤差和機械臂的控制精度因素,在抓取末階段采用單目相機,基于圖像的視覺伺服策略控制機械臂進(jìn)行精確位姿調(diào)整對目標(biāo)進(jìn)行抓取。以二自由度機械臂為基礎(chǔ),用攝像機獲取機械臂運動區(qū)域的圖像,通過圖像分析,求解機械臂末端執(zhí)行器在直角坐標(biāo)空間的坐標(biāo)值,將該值作為系統(tǒng)的實際位置,并通過反饋與期望坐標(biāo)值相減,將所獲得的誤差作為機械臂控制系統(tǒng)的補償量,實現(xiàn)整個系統(tǒng)的全閉環(huán)控制,進(jìn)一步解決了原半閉環(huán)控制帶來的控制精度不高的問題。針對多自由度機械臂的神經(jīng)網(wǎng)絡(luò)控制問題,將控制系統(tǒng)根據(jù)自由度分為兩個子系統(tǒng),提出全局神經(jīng)網(wǎng)絡(luò)與局部神經(jīng)網(wǎng)絡(luò)組合對機械臂系統(tǒng)進(jìn)行控制。
指出機械臂視覺抓取系統(tǒng)中基于深度學(xué)習(xí)的視覺識別可通過對深度卷積神經(jīng)網(wǎng)絡(luò)的訓(xùn)練實現(xiàn)多目標(biāo)快速識別而不必更改識別算法。這需要搜集被檢測目標(biāo)的大量圖像制作標(biāo)準(zhǔn)的訓(xùn)練集,利用前述基于深度神經(jīng)網(wǎng)絡(luò)的目標(biāo)識別算法對數(shù)據(jù)集進(jìn)行離線訓(xùn)練,將得到的模型用于在線識別。R-CNN 系列算法是目前主流的用于機械臂抓取的深度學(xué)習(xí)目標(biāo)檢測算法,但是速度上并不能滿足實時的要求。
機械臂視覺抓取在常規(guī)的機器人學(xué)、控制理論的基礎(chǔ)上,融合了計算機視覺理論、深度學(xué)習(xí)和人工智能等學(xué)科,具有重要的科研和應(yīng)用價值。
如何提高視覺圖像特征與優(yōu)化控制之間的契合度是現(xiàn)有技術(shù)需要解決的問題。針對現(xiàn)有技術(shù)的缺點,本文提出了一種結(jié)合深度強化學(xué)習(xí)[15]的機械臂視覺抓取控制優(yōu)化方法。在建立在人工智能算法深度強化學(xué)習(xí)的基礎(chǔ)上,能自主地學(xué)習(xí)視覺圖像的特征提取,并有效地規(guī)劃機械臂的抓取控制軌跡。同時,根據(jù)不同的應(yīng)用環(huán)境和抓取目標(biāo),自主地學(xué)習(xí)相應(yīng)的機械臂抓取控制策略,提高了算法的泛化能力。深度強化學(xué)習(xí)的應(yīng)用,避免了人為的特征提取和運動軌跡計算,提高了準(zhǔn)確度,簡化了復(fù)雜度,從而提升實際機械臂抓取控制的效率。
- ESP32上的深度強化學(xué)習(xí)
- 使用Matlab進(jìn)行強化學(xué)習(xí)電子版資源下載 0次下載
- 基于YOLOv3等的機械臂藥盒智能抓取方法 61次下載
- 基于深度強化學(xué)習(xí)的無人機控制律設(shè)計方法 46次下載
- 一種新型的多智能體深度強化學(xué)習(xí)算法 36次下載
- 基于深度強化學(xué)習(xí)仿真集成的壓邊力控制模型 0次下載
- 基于強化學(xué)習(xí)的壯語詞標(biāo)注方法 14次下載
- 虛擬乒乓球手的強化學(xué)習(xí)模仿訓(xùn)練方法 12次下載
- 基于深度強化學(xué)習(xí)的路口單交叉信號控制 21次下載
- 模型化深度強化學(xué)習(xí)應(yīng)用研究綜述 9次下載
- 機器學(xué)習(xí)中的無模型強化學(xué)習(xí)算法及研究綜述 11次下載
- 一種基于多智能體協(xié)同強化學(xué)習(xí)的多目標(biāo)追蹤方法 20次下載
- 深度強化學(xué)習(xí)的筆記資料免費下載 0次下載
- 使用加權(quán)密集連接卷積網(wǎng)絡(luò)的深度強化學(xué)習(xí)方法說明 3次下載
- 深度學(xué)習(xí)優(yōu)化器方法及學(xué)習(xí)率衰減方式的詳細(xì)資料概述 9次下載
- 深度解析!RK3568 加持機械臂是如何實現(xiàn)顏色識別與抓取的? 70次閱讀
- 深度學(xué)習(xí)的模型優(yōu)化與調(diào)試方法 923次閱讀
- 通過強化學(xué)習(xí)策略進(jìn)行特征選擇 388次閱讀
- 基于深度強化學(xué)習(xí)的視覺反饋機械臂抓取系統(tǒng) 2473次閱讀
- 基于多智能體深度強化學(xué)習(xí)的體系任務(wù)分配方法 4068次閱讀
- 基于一種深度強化學(xué)習(xí)技術(shù)的微電網(wǎng)實時能源優(yōu)化方法介紹 4079次閱讀
- 強化學(xué)習(xí)應(yīng)用中對話系統(tǒng)的用戶模擬器 2051次閱讀
- NLP中的深度學(xué)習(xí)技術(shù)概述 4844次閱讀
- 對NAS任務(wù)中強化學(xué)習(xí)的效率進(jìn)行深入思考 5086次閱讀
- 量化深度強化學(xué)習(xí)算法的泛化能力 2423次閱讀
- 基于強化學(xué)習(xí)的MADDPG算法原理及實現(xiàn) 2.1w次閱讀
- 用PopArt進(jìn)行多任務(wù)深度強化學(xué)習(xí) 5699次閱讀
- 深度強化學(xué)習(xí)將如何控制機械臂的靈活動作 1w次閱讀
- 什么是強化學(xué)習(xí)?純強化學(xué)習(xí)有意義嗎?強化學(xué)習(xí)有什么的致命缺陷? 1.7w次閱讀
- 解析圖像分類器結(jié)構(gòu)搜索的正則化異步進(jìn)化方法 并和強化學(xué)習(xí)方法進(jìn)行對比 3780次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1497次下載 | 免費
- 2單片機典型實例介紹
- 18.19 MB | 98次下載 | 1 積分
- 3S7-200PLC編程實例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關(guān)電源原理及各功能電路詳解
- 0.38 MB | 14次下載 | 免費
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7藍(lán)牙設(shè)備在嵌入式領(lǐng)域的廣泛應(yīng)用
- 0.63 MB | 3次下載 | 免費
- 8基于單片機的紅外風(fēng)扇遙控
- 0.23 MB | 3次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 6接口電路圖大全
- 未知 | 30321次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關(guān)電源設(shè)計實例指南
- 未知 | 21540次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537793次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學(xué)會AVR單片機與C語言視頻教程 下載
- 158M | 183278次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論