完善資料讓更多小伙伴認識你,還能領(lǐng)取20積分哦,立即完善>
標簽 > 點云
在逆向工程中通過測量儀器得到的產(chǎn)品外觀表面的點數(shù)據(jù)集合也稱之為點云,通常使用三維坐標測量機所得到的點數(shù)量比較少,點與點的間距也比較大,叫稀疏點云;而使用三維激光掃描儀或照相式掃描儀得到的點云,點數(shù)量比較大并且比較密集,叫密集點云。
文章:54個 瀏覽:3951次 帖子:3個
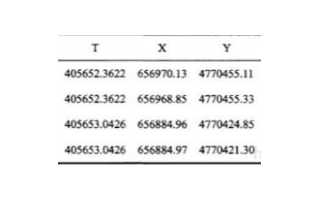
原來,這些都是激光雷達(LiDAR)點云數(shù)據(jù),每一個點都包含了三維坐標信息,也是我們常說的X、Y、Z三個元素,有時還包含顏色信息、反射強度信息、回波次數(shù)信息等。
2020-09-24 標簽:測距系統(tǒng)激光雷達點云 1.3萬 0
OPALS:維也納技術(shù)大學(xué)攝影測量研究組開發(fā)的軟件,學(xué)界最好。同樣是底層庫+功能模塊的結(jié)構(gòu),可支持幾乎任何一種激光雷達數(shù)據(jù),處理效率很高。支持C++/P...

點云概念 點云與三維圖像的關(guān)系:三維圖像是一種特殊的信息表達形式,其特征是表達的空間中三個維度的數(shù)據(jù),表現(xiàn)形式包括:深度圖(以灰度表達物體與相機的距離)...
十大點云數(shù)據(jù)處理技術(shù)和點云應(yīng)用匯總
在二維圖像上,有Harris、SIFT、SURF、KAZE這樣的關(guān)鍵點提取算法,這種特征點的思想可以推廣到三維空間。從技術(shù)上來說,關(guān)鍵點的數(shù)量相比于原始...
2023-01-12 標簽:數(shù)據(jù)處理PCL點云 5315 0
X,Y是作為圖像的行列坐標,Z是實數(shù)(表示的是深度/高度),而不是灰度,因為灰度值是0——255之間的整數(shù);
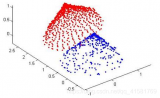
ICP(Iterative Closest Point迭代最近點)算法是一種點集對點集配準方法。如下圖所示,PR(紅色點云)和RB(藍色點云)是兩個點集...
這是一個實際拍攝的點云圖,經(jīng)過了坐標系糾正變換,更方便查看點云位置。里面有一塊平面就是我們需要匹配的目標點云。
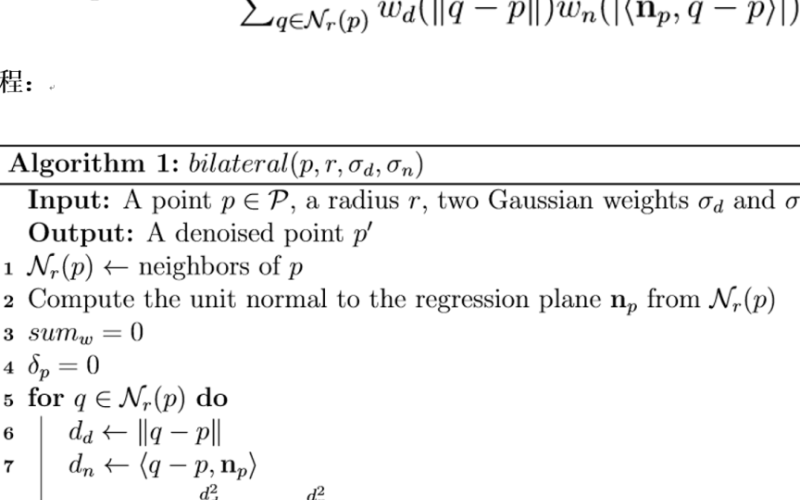
摘要: 我們通過掃描儀獲得物體的點云,經(jīng)常摻雜著噪音。產(chǎn)生噪音的原因可能有很多多種,例如,切向的采集方向、環(huán)境光干擾、物體材質(zhì)的反射等因素導(dǎo)致。因此設(shè)置...
3d掃描儀三維掃描儀技大空間礦山地下礦區(qū)采用新型三維掃描方式
大空間礦山地下礦區(qū)采用新型三維掃描方式協(xié)助作業(yè) 海南石碌鐵礦位于海南島昌江縣石碌鎮(zhèn)境內(nèi),北距省會海口市280多公里,西與八所港有鐵路相通,相距僅52公里...
怎么評價這種思路呢?其實還是不錯的,除了分類任務(wù),在點云目標檢測中,也有不少論文采用了這種思路,比如自動駕駛場景的目標檢測,如MV3D等,也是會把點云投...
2020-08-28 標簽:激光雷達PCL深度學(xué)習(xí) 3830 0
自動駕駛領(lǐng)域的下游任務(wù),我認為主要包括目標檢測、語義分割、實例分割和全景分割。其中目標檢測是指在區(qū)域中提取目標的候選框并分類,語義分割是對區(qū)域中不同類別...
2022-12-14 標簽:圖像數(shù)據(jù)集點云 3268 0
復(fù)盤點云數(shù)據(jù)處理技術(shù)流程,以高植被山區(qū)地區(qū)為例
點云預(yù)處理成果→噪聲點濾除→坐標轉(zhuǎn)換→點云自動分類→根據(jù)實測點檢查合格→人工編輯分類結(jié)果→地面點→構(gòu)建數(shù)字高程模型→等高線、高程點成果。
2020-09-24 標簽:數(shù)據(jù)處理激光雷達點云 3104 0

雪湖科技的激光點云AI計算模塊三個技術(shù)創(chuàng)新特點
激光雷達和攝像頭是感知環(huán)境的核心傳感器。激光雷達通過激光主動探測成像,具有不受環(huán)境光影響,直接測量物體的距離方位、深度信息、反射率等優(yōu)點。

在KITTI數(shù)據(jù)中有一個附加值“反射率”,這是衡量激光光束在那個位置被反射回來了多少。所以在KITTI數(shù)據(jù)中,其點云數(shù)據(jù)就是N*4的矩陣。
2020-09-24 標簽:數(shù)據(jù)集激光光束點云 2877 0
大空間測量測繪3d掃描儀大空間掃描三維掃描技術(shù)用于老舊建筑室內(nèi)外改造三維掃描儀
三維掃描技術(shù)用于老舊建筑室內(nèi)外改造 隨著信息產(chǎn)業(yè)的發(fā)展,智能化水平的不斷提高,許多舊辦公樓出現(xiàn)了不同程度的飾面老化,設(shè)施落后、屋面漏水等問題都是相當(dāng)落后...
來源:Xilinx 賽靈思 V2X(Vehicle to Everything, 車聯(lián)萬物),是車與外界一切交互的技術(shù),可以理解為車與外界萬物聯(lián)系成網(wǎng),...
PointXYZ 成員:float x,y,z;表示了xyz3D信息,可以通過points[i].data[0]或points[i].x訪問點X的坐標值
蔚來自研激光雷達主控芯片NX6031V10面世 一年可收回研發(fā)成本
蔚來自研激光雷達主控芯片NX6031V10面世 一年可收回研發(fā)成本 蔚來自研激光雷達主控芯片NX6031V10面世了,預(yù)計10月正式量產(chǎn)。在NIO IN...
船舶輪船遠洋貨輪加裝脫硫塔壓載水處理裝置改造改裝空間三維掃描技術(shù)的應(yīng)用
船舶輪船遠洋貨輪加裝脫硫塔壓載水處理裝置改造改裝空間三維掃描技術(shù)的應(yīng)用船舶發(fā)展與科技船舶工業(yè)的發(fā)展離不開三維激光掃描科技的支持,形展科技大空間三維掃描技...
解決由激光雷達線數(shù)差異導(dǎo)致的三維目標檢測域適應(yīng)問題
激光雷達雖然可以提供準確的三維信息,但價格也是昂貴的,尤其是高線數(shù)激光雷達。因此在一些較低成本的產(chǎn)品中,例如清潔機器人和無人配送車,無法部署高線數(shù)雷達。
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1

