完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 解碼器
解碼器(decoder),是一種能將數(shù)字視音頻數(shù)據(jù)流解碼還原成模擬視音頻信號(hào)的硬件/軟件設(shè)備。像視頻的mpeg4,音頻的mp3,ac3,dts等這些編碼器可以將原始數(shù)據(jù)壓縮存放,但這也還都是常用的編碼格式,還有些專業(yè)的編碼格式,一般家庭基本不會(huì)用到。
文章:510個(gè) 瀏覽:41705次 帖子:235個(gè)
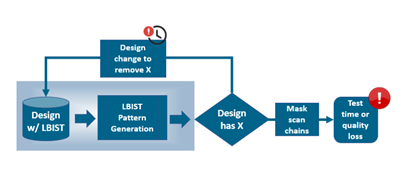
部署在汽車、醫(yī)療和航空航天等安全關(guān)鍵應(yīng)用中的集成電路 (IC) 或芯片的運(yùn)行故障可能會(huì)產(chǎn)生災(zāi)難性后果。這些故障可能源于芯片中逃脫制造測(cè)試的缺陷,或者由于...

所以,這篇arXiv的論文提出了一個(gè)簡(jiǎn)單而有效的基于SAM大模型的視聽(tīng)定位和分割框架,即AV-SAM,它可以生成與音頻相對(duì)應(yīng)的發(fā)聲對(duì)象掩碼。具體而言,利...

最近幾個(gè)月,隨著ChatGPT的現(xiàn)象級(jí)表現(xiàn),大模型如雨后春筍般涌現(xiàn)。而模型推理是抽象的算法模型觸達(dá)具體的實(shí)際業(yè)務(wù)的最后一公里。

模型在學(xué)習(xí)可轉(zhuǎn)移的語(yǔ)義分割表示方面的有效性
當(dāng)前語(yǔ)義分割任務(wù)存在一個(gè)特別常見(jiàn)的問(wèn)題是收集 groundtruth 的成本和耗時(shí)很高,所以會(huì)使用預(yù)訓(xùn)練。例如監(jiān)督分類或自監(jiān)督特征提取,通常用于訓(xùn)練模型...

如果經(jīng)過(guò)多任務(wù)微調(diào),編碼器-解碼器掩碼模型最好【這參數(shù)量都翻倍了,很難說(shuō)不是參數(shù)量加倍導(dǎo)致的】。換個(gè)角度想,在多任務(wù)微調(diào)之后,自回歸全語(yǔ)言模型在參數(shù)量不...
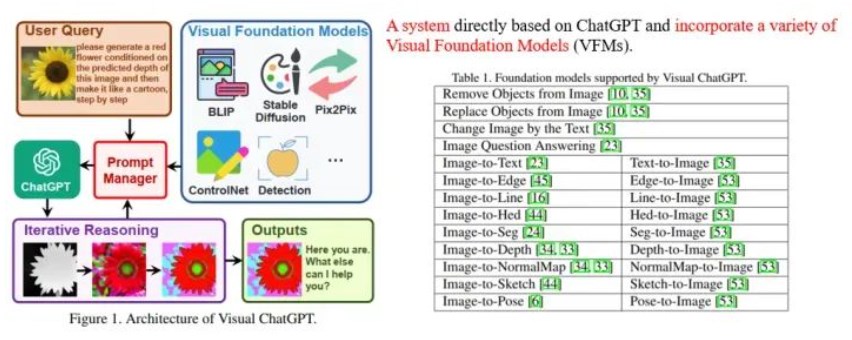
大型語(yǔ)言模型LLM(Large Language Model)具有很強(qiáng)的通用知識(shí)理解以及較強(qiáng)的邏輯推理能力,但其只能處理文本數(shù)據(jù)。
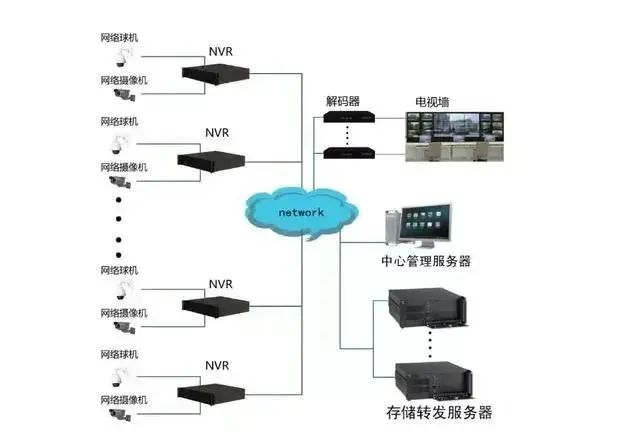
從定義上來(lái)說(shuō),視頻編解碼器,是指一個(gè)能夠?qū)?shù)字視頻進(jìn)行壓縮或者解壓縮的程序或者設(shè)備。 這么說(shuō)你可能有些模糊,總的來(lái)說(shuō),監(jiān)控系統(tǒng)視頻解碼器的作用就是...
2023-05-06 標(biāo)簽:解碼器視頻解碼器網(wǎng)絡(luò)通訊 5890 0
解碼器就是在供電側(cè)的一個(gè)電阻元件或電容元件,在安定器的12V側(cè),串在回路中就行了,目的是防止行車電腦報(bào)警,不同的車有不同的解碼器,主要是應(yīng)對(duì)車燈功率不足...
當(dāng)一個(gè)監(jiān)控項(xiàng)目中是有多臺(tái)錄像機(jī)的時(shí)候,每臺(tái)錄像機(jī)是可以接顯示器來(lái)顯示圖像,但是!它只能顯示自己添加的攝像機(jī)圖像! * **解碼器** **是可以把任意...
總的來(lái)說(shuō),蘋果采用了將人物本體與光線分別處理再進(jìn)行疊加的策略。早期的三維人像合成工具在轉(zhuǎn)換過(guò)程中可能產(chǎn)生形變。而爆火的NeRF通過(guò)將場(chǎng)景拆分成具體因素,...
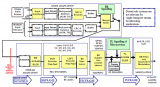
DVB-S2標(biāo)準(zhǔn)協(xié)議:傳輸系統(tǒng)描述
該系統(tǒng)被定義為執(zhí)行基帶數(shù)字信號(hào)自適應(yīng)的設(shè)備功能塊,從單個(gè)(或多個(gè))MPEG傳輸流多路復(fù)用器(ISO/IEC 13818-1[1])的輸出,或從單個(gè)(或多...
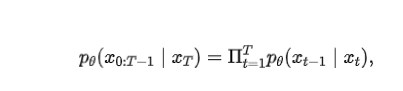
基于Diffusion Probabilistic Model的醫(yī)學(xué)圖像分割
MedSegDiff 在原版 DPM 的基礎(chǔ)上引入了動(dòng)態(tài)條件編碼,增強(qiáng) DPM 在醫(yī)學(xué)圖像分割上的分步注意力能力。
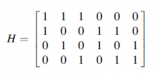
LDPC碼在IEEE802.16e、IEEE802.11n、IEEE802.11ac、IEEE802.11ad以及5G等高吞吐量系統(tǒng)中得到了廣泛的應(yīng)用。
MAE再發(fā)力,跨模態(tài)交互式自編碼器PiMAE席卷3D目標(biāo)檢測(cè)領(lǐng)域
MAE以其簡(jiǎn)單的實(shí)現(xiàn)方式、強(qiáng)大的視覺(jué)表示能力,可以在很多基礎(chǔ)視覺(jué)任務(wù)中展現(xiàn)出良好的性能。但是目前的工作大多是在單一視覺(jué)模態(tài)中進(jìn)行,那MAE在多模態(tài)數(shù)據(jù)融...
2023-04-21 標(biāo)簽:解碼器編碼器目標(biāo)檢測(cè) 1487 0
利用TRansformer進(jìn)行端到端的目標(biāo)檢測(cè)及跟蹤
多目標(biāo)跟蹤(MOT)任務(wù)的關(guān)鍵挑戰(zhàn)是跟蹤目標(biāo)下的時(shí)間建模。現(xiàn)存的用檢測(cè)跟蹤的方法采用簡(jiǎn)單的heuristics,如空間或外觀相似性。
基于LAformer的車道感知場(chǎng)景約束自動(dòng)駕駛軌跡預(yù)測(cè)
考慮到數(shù)據(jù)規(guī)模和真值的可用性,論文對(duì)具有39,472個(gè)序列的Argoverse 1驗(yàn)證集進(jìn)行了消融研究。基線模型預(yù)測(cè)未來(lái)軌跡僅以目標(biāo)及其鄰近智能體的觀測(cè)...
2023-04-14 標(biāo)簽:解碼器自動(dòng)駕駛 1403 0
當(dāng)前,對(duì)于一個(gè)場(chǎng)景的快速重建是重要的,目標(biāo)是實(shí)現(xiàn)一個(gè)快速的、全面的三維重建模型。可以應(yīng)用于野外的林業(yè)資源保護(hù)、火災(zāi)和地震的災(zāi)后搶救、邊境安防、油田或者海...
GO-Surf: 用于快速、高保真RGB-D表面重建的神經(jīng)特征網(wǎng)格優(yōu)化
GO-Surf使用多級(jí)特征網(wǎng)格和兩個(gè)淺層MLP解碼器。給定一個(gè)沿射線的采樣點(diǎn),每個(gè)網(wǎng)格通過(guò)三線插值進(jìn)行查詢。多級(jí)特征被串聯(lián)并解碼為SDF,并用于計(jì)算樣本...
介紹第一個(gè)結(jié)合相對(duì)和絕對(duì)深度的多模態(tài)單目深度估計(jì)網(wǎng)絡(luò)
單目深度估計(jì)分為兩個(gè)派系,metric depth estimation(度量深度估計(jì),也稱絕對(duì)深度估計(jì))和relative depth estimat...
用于快速高保真RGB-D表面重建的神經(jīng)特征網(wǎng)格優(yōu)化的GO-Surf
我們提出了GO-Surf,一種直接的特征網(wǎng)格優(yōu)化方法,用于從RGB-D序列中準(zhǔn)確和快速地重建表面。
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語(yǔ)言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無(wú)刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺(jué) | 無(wú)人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國(guó)民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹(shù)莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1


