完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > io-link
IO-Link是一種開放式標準串行通信協議,允許支持IO-Link的傳感器、設備進行雙向數據交換,并連接到主站。IO-Link協議最早由西門子提出,現在已經成為國際標準IEC61131-9。
文章:133個 瀏覽:19837次 帖子:6個
在“雙碳”政策及技術創新等要素的綜合影響下,光伏已在建筑、農業、交通、工業等多個領域得以應用,并持續滲透智慧城市各種應用場景,降低能源消耗、提升能源使用...
一層?兩層?還是完全沒有進料?倍加福作為超聲波傳感器領域專家,全新推出帶IO-Link接口的雙張超聲波傳感器,無論是檢測紙張、箔片、木材、金屬,還是高反...
Maxim高集成度IO-Link 溫度傳感器,較分立方案更靈活、可靠
中國,北京,2015年3月26日。Maxim Integrated Products, Inc. (NASDAQ: MXIM)推出MAXREFDES42...
亞信AX58400 EtherCAT轉IO-Link網關與馬達控制解決方案
演示亞信電子AX58400EtherCAT轉IO-Link網關,與EtherCAT從站馬達控制解決方案的基本功能。 AX58400 EtherCAT轉I...
全球領先的半導體公司 ADI 與國內 I O-Link 集成方案供應商 安勝智能在合肥 共同簽署戰略合作備忘錄,整合雙方在 IO -Link 領域的先進...
使非接觸式編碼器類型更加豐富的圖爾克IO-Link不銹鋼接口編碼器
IO-Link接口技術成功應用于圖爾克無機械磨損不銹鋼外殼的編碼器。具有堅固不銹鋼外殼的QR24電感式編碼器特別適用于清潔或極端環境的應用,例如食品飲料...
企業要實現智能化生產,需要在各個層面實現智能、靈活和高效的連接,IO-Link技術以更加高效、靈活通訊和經濟性,已成為企業實現數字化升級改造的有效途徑之一。
亞信AX58400 EtherCAT轉IO-Link網關解決方案
演示亞信電子的AX58400 EtherCAT轉IO-Link網關解決方案,這個方案集成亞信自行開發的IO-Link主站通信協議棧。 AX58400 E...
首款四端口IO-Link主機參考設計,加速工業傳感器評估過程
中國,北京,2015年4月14日。Maxim Integrated Products, Inc. (NASDAQ: MXIM)推出MAXREFDES79...
2015-04-14 標簽:IO-LinkMaxim Integrated 1664 0
晨控的IP67分布式IO-Link連接,標準接口,接線簡單,開放連接,易于擴展,主站儲存數據,設備更換更簡單;有診斷指示,方便維護、調試,大大降低停機所需時間。

意法半導體發布工業智能傳感器評估套件加快基于IO-Link收發器和STM32 MCU的應用設計
以45.8mm x 8.3mm 的纖薄主板為亮點,意法半導體STEVAL-IOD04KT1工業傳感器套件可簡化開發者為獨立于現場總線的點對點雙向通信應用...
在傳統信號燈性能受限之際,倍加福推出新型信號燈,憑借集成的IO-Link接口V1.1 為用戶解鎖了全新功能。其九個區段均可獨立操控與定制,用戶能夠自由挑...
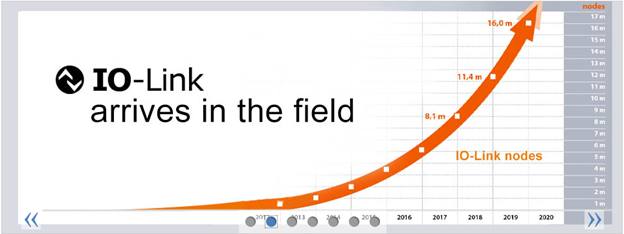
近年來,物聯網技術在工業領域中快速發展,新一代基于以太網技術的自動化產品得到了廣泛的應用。根據市場研究機構FMI的最新報告,2018年IO-Link產品...
IO-Link主站,實現管理層級與傳感器/執行器層級之間高效可靠通信的利器,它通過IO-Link主站將傳感器數據傳輸至更高層級的信息系統,并從那里接收數據。
使用IO-Link技術能帶來哪些優勢?細數IO-Link八大優勢
IO-Link是國際標準化的跨供應商IO技術,能夠實現從控制系統到傳感器/執行器級別的雙向通信。

IO-Link總線協議高頻RFID標簽讀寫器IO通訊接口CK-FR05-IO
IO-Link(IEC61131-9)是一種開放式標準串行通信協議,允許從支持IO-Link的傳感器和設備進行雙向交換數據,并連接到主站。
2022-12-27 標簽:IO-Link 1420 0

只有簡單的開關信號通過控制面板在本地進行交換,但是現在借助IO-Link和OPC UA等技術,我們可以通過云端在全球范圍提供詳細的狀態數據。
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1