完善資料讓更多小伙伴認識你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術(shù)文庫為您提供最新技術(shù)文章,最實用的電子技術(shù)文章,是您了解電子技術(shù)動態(tài)的最佳平臺。
提出了一種使用低成本無人機實時生成探索地圖的解決方案。這依賴于Tello Edu無人機提供的信息,該無人機將圖像流式傳輸?shù)酵獠抗P記本電腦上以進行實時處理。該解決方案運行單目視覺 SLAM來注冊圖像并創(chuàng)建未縮放的環(huán)境地圖。...
無人機的應(yīng)用范圍不斷擴大,應(yīng)用范圍從業(yè)余愛好者到商業(yè)和工業(yè)領(lǐng)域,再到最先進的軍事應(yīng)用。無人機的優(yōu)勢在于可以遠程操作,因此可以飛越難以親自到達的地區(qū),危險或不方便。商業(yè)領(lǐng)域的應(yīng)用是多方面的:農(nóng)業(yè)、植物和建筑物的監(jiān)控、拍攝區(qū)域,甚至包裹、藥品或必需品的運送。未來幾年,無人機的新應(yīng)用和進一步應(yīng)用很可能會被...
無人機一般風過大時便不能起降了,但無人船則要求承受大的風浪,無人船除了生命保障系統(tǒng)外,其他系統(tǒng)跟有人船的要求都是一樣的。這些都意味著無人船的避障相比無人機會難更多。...
北京時間 8 月 3 日零時 18 分,飛行航班信息平臺 Flightradar24 發(fā)布推文稱,佩洛西搭乘的 C-40C 專機(呼號 SPAR19)在臺北降落時有 70.8 萬人進行實時追蹤,SPAR19 創(chuàng)下 Flightradar24 平臺實時追蹤人數(shù)最高紀錄。...
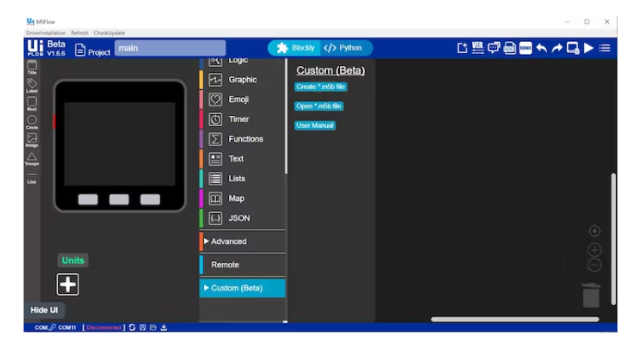
該項目通過手腕上的 M5stack 和 Uiflow 塊控制 Dji Tello 無人機!...
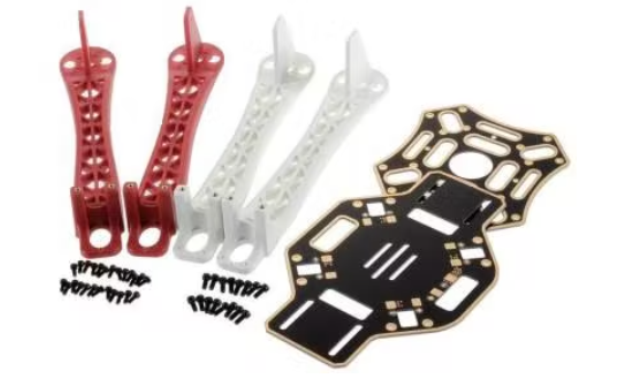
在本教程中,我們將設(shè)計一個 X 形的四軸飛行器。兩種形狀都是穩(wěn)定的,但在向前飛行中,四軸飛行器在向前飛行中需要偏航控制輸入。兩種配置的偏航控制權(quán)限相同,但在交叉配置的情況下,俯仰和橫滾控制權(quán)限最多可增加約 30%。四軸飛行器依靠加速度計和陀螺儀等電子傳感器和控制系統(tǒng)來穩(wěn)定飛行。...

在無人機視覺系統(tǒng)的常規(guī)研究中,用于基于視覺的導航的視覺同步定位和映射(Visual SLAM)和視覺里程計(VO)是主要課題。...
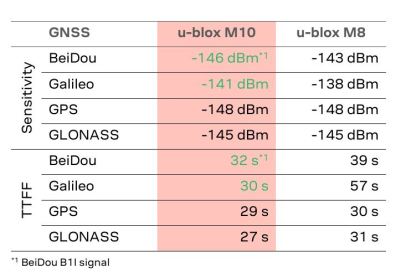
u-blox 推出了 M10,這是其最新的 GNSS(全球?qū)Ш叫l(wèi)星系統(tǒng))平臺,完全由內(nèi)部設(shè)計,用于低功耗定位應(yīng)用。 u-blox M10 適用于廣泛的應(yīng)用,例如運動手表或貨物和牲畜追蹤器,所有這些都具有小尺寸和非常長的電池壽命。 摩天大樓限制了天空的一部分。 因此,GNSS 接收器視線范圍內(nèi)的衛(wèi)星數(shù)...
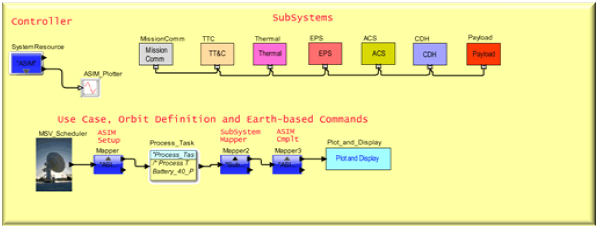
CubeSat 是一種繞地球運行的小型航天器。立方體衛(wèi)星的基本設(shè)計是一個 10 厘米(4 英寸)的立方體,質(zhì)量小于 1.33 千克(2.93 磅)。一旦進入太空,它就可以用于各種應(yīng)用。立方體衛(wèi)星是經(jīng)濟的,并且在很大程度上降低了發(fā)射成本。由于它重量輕,因此您不需要大量的燃料來支撐它們。在大多數(shù)情況下,...
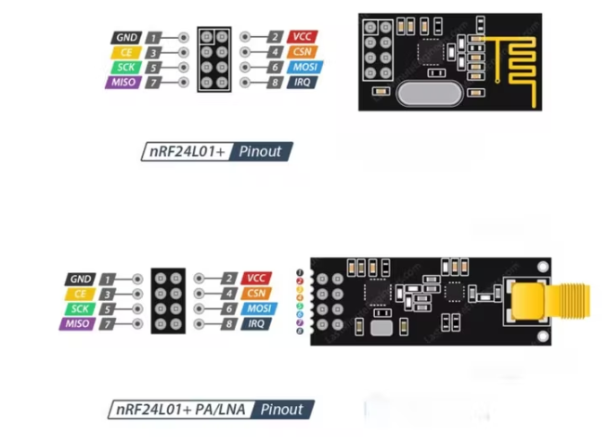
nRF24L01 是一個無線收發(fā)模塊,這意味著每個模塊都可以發(fā)送和接收數(shù)據(jù)。它們的工作頻率為 2.4GHz,屬于 ISM 頻段,因此在幾乎所有國家/地區(qū)用于工程應(yīng)用都是合法的。高效運行時,模塊可以覆蓋 100 米(200 英尺)的距離,這使其成為所有無線遙控項目的絕佳選擇。...
單粒子效應(yīng)是一種瞬態(tài)效應(yīng),指某個特定的高能粒子穿過電路敏感區(qū)域所引起的電路故障,這個故障可能是可恢復的或是永久性的。...
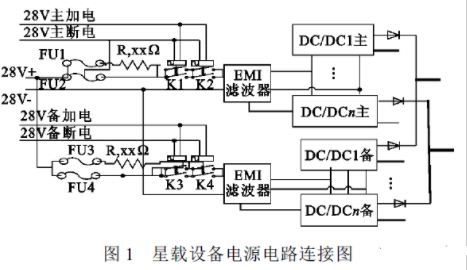
電源保護電路由串聯(lián)在正母線上的電阻R1、二極管V1、V2 以及由電容C1、C2、C3 和電感L1、L2 構(gòu)成的濾波電路組成。...
rospy 是 ROS 的純 Python 客戶端庫。rospy 客戶端 API 使 Python 程序員能夠快速與 ROS主題、服務(wù)和參數(shù)交互。rospy 的設(shè)計有利于實現(xiàn)速度(即開發(fā)人員時間)而不是運行時性能,以便算法可以在 ROS 中快速原型化和測試。...
某無人機項目4路MIPI技術(shù)方案;調(diào)試助手打印出來的圖像信息,圖中可以顯示已經(jīng)正確地接收了77224幀,共運行了約1小時,丟幀為11(注意,此處丟幀是上電后同步時的丟幀,之后處于穩(wěn)定運行狀態(tài)。)...
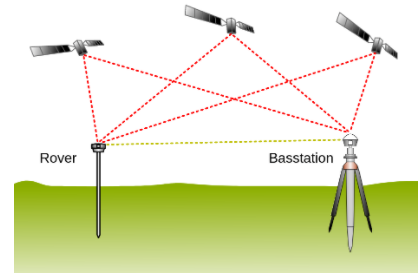
無人機通過RTK GPS實現(xiàn)無人機精準降落的方式主要依靠RTK GPS定位精度可達厘米級這一特性實現(xiàn)的。只需要給定精準的目標降落位置,再結(jié)合無人機自身精準的實時位置即可實現(xiàn)無人機精準降落。...
與地面應(yīng)用一樣,LEO衛(wèi)星需要信號和電源隔離來防止接地電勢差同時提高抗噪性能,從而增強系統(tǒng)完整性和性能。...

潛艇綜合聲納系統(tǒng)是指在潛艇上,由多部聲納和水聲測量設(shè)備組成的、具有綜合化功能的水聲探測系統(tǒng)。現(xiàn)代潛艇綜合聲納系統(tǒng)通常由被動測距基陣、艇首陣、偵察水聽器陣、通信陣、勺側(cè)線列陣、拖曳線列陣、本艇噪聲監(jiān)測水聽器、通用信號處理機、通用多功能顯控臺等組成。有的系統(tǒng)還包括一部拖曳式線列陣聲納。 潛艇綜合聲納系統(tǒng)...
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1




