 電子發燒友App
電子發燒友App


?
隨著環境感知在室內導航、物流管理、控制接入、實時監控等領域的廣泛應用。室內定位感知系統以及無線網絡的定位研究備受關注,關于RFID(Radio Frequency Identification,RFID)定位技術的研究課題開始出現。基于RFID標簽的定位技術遵循無線定位的基本原理準則,考慮到RFID技術的特殊性和限制性,未來定位方法要注重從射頻傳播模型、讀寫器的多樣性、可擴展性等方面進行研究。文中主要對目前存在的RFID定位技術加以總結,介紹現代室內無線網絡中廣泛應用的定位原理,并對主要的RFID定位方案進行了分類。
1 RFlD技術
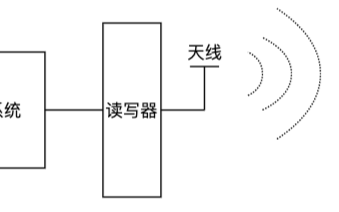
RFID是一種非接觸式自動識別技術,它通過射頻信號自動識別目標對象并獲取相關數據。RFID系統主要由:標簽、讀寫器和數據庫管理單元3部分組成,如圖1所示。

?
其工作原理是標簽進入磁場后,接收讀寫器發出的射頻信號,憑借感應電流所獲得的能量發出存儲在芯片上的信息;或者主動發送出某一頻率的信號。讀寫器讀取信息并解碼后,送至數據管理系統進行數據處理。
RFID標簽可分為兩種:有源電子標簽,標簽的工作電源完全由內部電池供給,同時標簽電池的能量供應也部分地轉換為電子標簽與讀寫器通信所需的射頻能量。無源電子標簽沒有內裝電池,在讀寫器的讀出范圍之外時,電子標簽處于無源狀態,在讀寫器的讀出范圍之內時,標簽從讀寫器發出的射頻能量中提取其工作所需的電源。無源電子標簽體積小、成本低,但在讀寫距離及適應物體運動方面比有源電子標簽差。
RFID讀寫器由天線、射頻收發模塊、信號處理單元、控制單元和接口電路組成。射頻收發模塊完成射頻信號接收、發射、調制解調和功率控制;信號處理單元的主要功能為防沖突算法的實現和信息加密、解密、校驗和糾錯;控制單元協調整個讀寫器的工作;接口電路完成讀寫器和數據管理系統之間的數據傳輸。
數據管理系統由數據庫完成數據的存儲和管理,它通過各種接口和分布于各處的RFID讀卡器通信,實時獲取RFID讀寫器捕獲的標簽信息。
2 室內無線網絡定位原理
室內環境無線信號的傳播往往受到多徑、非視距、衍射和反射的影響,使得目前已提出的室內定位算法并不能精確地測量信號。定位算法可以歸類為距離估計法、場景分析法和鄰近法。
2.1 距離估計法
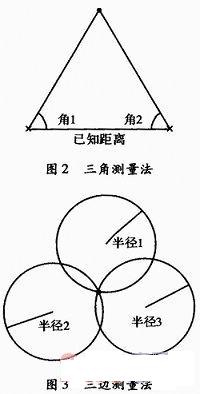
距離估計法是利用三角形的特點來估計待定位體的位置的算法。如圖2所示,三角測量法通過測量不少于兩個參考點所接收信號的到達角度,形成角度的兩條直線的交點即是所估計的位置。如圖3所示,三邊測量法通過測量待定位點到至少3個參考點的距離來估計待定位點的位置。這種測量技術利用接收信號接度(Received Signal Strength,RSS)、信號到達時間(Time Of Arrival,TOA)、信號到達時間差(Time-Difference Of Arrival,TDOA)和接收信號相位(Received Signal Phase,RSP)等方法。
?
(1)RSS:發射信號強度的衰減與發射機和接收機之間的距離成函數關系。依據相應的傳播信號路徑損耗,把信號強度轉化為距離進行定位,待定位點最少需要3個參考點參與計算。基于RSS的系統通常需要自適應機制以減少室內環境下多徑衰落及陰影效應的影響。
(2)TOA:參考點與待定位點的距離與信號的傳播時間成比例關系。基于到達時間的系統最少需要3個不同的測量裝置來完成二維定位。 TOA系統要求所有的發射機和接收機之間保持時間同步。如果有多個參考點,采用最小平方算法以減少定位誤差。
(3)TDOA:TDOA依據待定位點發射信號到達多個測量裝置的時間不同,把時間差轉化為距離差,以確定待定位點的相對位置。TDOA方法至少需要3個測量裝置參與距離差的測量,要求測量裝置之間保持時間同步。由于室內環境非視距和多徑效應的特點,影響了信號的傳播時間,降低了定位精度。
(4)RSP:采用信號波長分式表示時延來估計距離。這種方法要求發射機放在特定位置并且假設發射機發射完全正弦信號。利用和TOA相同的算法測量相位值估計位置,也可以利用和TDOA相同的算法測量相位差值實現定位。RSP方法的缺點是應用于室內環境時,要求滿足視距傳播路徑來減少定位誤差。
(5)AOA:主要利用方向天線或陣列天線測量待定位點信號直線到達接收機的角度信息來確定待定位點的位置。這項技術要求的設備復雜,并且無法克服陰影效應和多徑的影響。
2.2 場景分析法
場景分析法由兩個步驟組成:(1)收集相關的環境信息。(2)通過把實時測量值與指紋集相匹配來估計待定位點的位置。常用的有基于信號強度的指紋識別技術。指紋識別技術主要分為K-近鄰法和概率統計法。
K-鄰居法:首先,測量已知位置的接收信號強度值,并且建立RSS數據庫。然后,在實時測量階段,用待定位點的RSS值與之前建立的信號空間相匹配,利用均方根法尋找K個最近值,確定出待定位點的位置。
概率統計法:依據后驗概率和貝葉斯準則,假設有Ⅳ個位置作為測量參考點,測量待定位點移動時的信號強度矢量,選擇概率最高的作為待定位點的位置。一般來說,概率統計方法涉及4個階段:校準、動態學習、誤差估計和歷史追蹤。
2.3 鄰近法
這種方法主要依賴天線的排列密度。當待定位點進入到一個接收機天線輻射區域時,它的位置假定為此接收機位置。當有多個天線檢測到待定位點時,待定位點的位置假定為接收信號最強的接收機位置。這種方法簡單且較易實現,但是,準確性與天線相關。
3 射頻識別定位方法
目前已提出有多種不同的RFID方法,這些方法把室內定位原理與RFID技術自身的特性相結合。
RFID定位方法可以分為:距離估計法、場景分析法、約束法。
3.1 距離估計法
(1)SpotON:SpotON系統采用可調整的長距離主動RFID標簽,多個讀寫器收集標簽的信號強度測量值,通過定義的函數來估計標簽與讀寫器之間的距離,使用最小二乘法進行計算。
(2)SAW ID—tags:表面聲波識別標簽全部是無源標簽,標簽采用脈沖壓縮和編碼技術。測定每個標簽脈沖反應的頻率,接著標簽重新傳送相關信號。重傳信號有一個自相關峰值,產生幅度值最高的脈沖響應標簽就是待定位點的標簽。基于信號到達時間的方法測量每個讀寫器i與標簽之間的距離如式(1)所示。

?
其中,Tsys是系統的時間延時;Tcable,i是預校準脈沖期間接收天線和解調器之間電纜傳輸延時;TSAW是所有標簽的時間延時。有3個估計距離時,系統用三邊測量法定位標簽。
(3)LPM:本地位置測量系統采用有源標簽,讀寫器與已知固定位置的參考標簽(RT)同步運行。在收到激活指令后,選定的測量標簽(MT)在時刻TMT響應。每個讀寫器Ri相應的時間差值通過式(2)計算

?
計算至少3個讀寫器的時間差值,用加權平均法估計標簽的位置。
(4)RSP:RSP也稱為波達方向(Direction of Arrival,DOA),利用接收機處的陣列天線和波達方向估計技術,確定接收機到信源的波達方向,利用多個接收機估計的DOA進行三角測量,方向線的交點就是信源的估計位置。
3.2 場景分析法
(1)LANDMARC:LANDMARC系統主要采用K-近鄰法。已知位置的參考標簽規則地分布在室內,讀寫器有8個不同的能量等級,通過比較讀寫器接收到待定位標簽與參考標簽信號強度值的大小來找出離待定位標簽最近的幾個參考標簽。

?
式(4)表示了參考標簽與待定位標簽的關系,n表示讀寫器的數量;Si表示讀寫器i接收到待定位標簽的RSS值;θj,i表示讀寫器i接收到參考標簽j的RSS值。根據這幾個參考標簽的坐標,并結合它們的權重用經驗公式計算標簽的位置。LANDMARC系統具有很高的定位精度,可擴展性好,能處理比較復雜的環境,但由于信號的多路徑效應,定位精度不高;為了定位更加準確,往往要放置更多的參考標簽,需要增加成本,并且可能產生射頻干擾現象。
(2)VIRE:核心思想是在不增加額外參考標簽的情況下,通過去掉不可能的位置以得到待定位物體更精確的位置。與LANDMARC不同的是,VIRE引入了近似圖的概念,近似圖覆蓋整個定位區域,并且劃分為多個小區域,其中每個區域的中心對應著一個虛擬參考標簽。每一個閱讀器都有一幅對應的近似圖,如果閱讀器讀到的近似圖中某些區域的RSS值與讀到的待定位標簽RSS值差的絕對值在某個閾值之內,則將這些區域標記。假設有k個閱讀器,則在獲得k幅近似圖之后,通過取交集可以得到待定位標簽最可能在的區域。若最后得到的區域數為n,則可以通過式(5)算出待定位標簽的坐標。
?
其中,權重w=w1i×w2i;w1i表示虛擬參考標簽和被定位標簽偏差;w2i是最后所得區域密度的相關函數。VIRE方法引入了虛擬參考標簽的概念,使得在不增加額外標簽的前提下提高了定位精度,VIRE方法對環境也有較好的適應性,在復雜和封閉的環境中也有較高的精度。
(3)卡爾曼濾波:卡爾曼濾波法同樣利用參考標簽。第一步,假定每個參考標簽與待定位標簽距離為Di,計算兩個讀寫器所接收到待定位標簽的RSS值,采用最小均方差算法,建立系統的非線性方程。
?
第二步是建立一個讀寫器檢測區域的誤差測量概率圖。同樣地,用第一步的方法計算讀寫器收到參考標簽的RSS值,依據估計位置和實際位置,推算出相應的概率誤差分布函數。卡爾曼濾波利用迭代實時圖來減少RSS誤差影響,從而提高了定位精度。
(4)Scout:Scout技術屬于概率統計法定位技術,這種方法采用參考標簽和多個讀寫器確定主動標簽的位置有以下3個步驟:首先,校準參考標簽的傳播參數;其次,待定位標與讀寫器之間的距離利用RSS概率模型計算出來;最后,應用貝葉斯推論確定標簽的位置。
3.3 約束法
3-D constrains:首先,定義包含性約束條件,如果一個讀寫器檢測一個標簽,就表明它們之間的距離在讀寫器范圍之內。同樣定義非包含性約束條件,讀寫器不能檢測到標簽。把所定義的空間離散化為點,從而減小讀寫器的檢測區域。最大約束條件下,點的集合的均值就是待定位標簽的估值。

?
4 結束語
概括介紹了目前存在的RFID定位技術,可以歸類為:距離估計法、場景分析法和約束法。RFID系統采用無源標簽或有源標簽,當需要特定設備考慮環境的變化時,一些技術還要求布置參考標簽。相比而言,有些技術成本低并適合不同環境的使用。在實際環境中,這些RFID定位方案都有各自重要的特點和優勢。定位方法和標簽的選擇很大程度上影響著定位信息的準確性,并且關系到整個RFID系統的成本和效率。
通過對RFID定位技術的總結和比較,結合自身的技術特點,未來的RFID定位技術應該注重以下幾個方面的研究:(1)射頻傳播模型:目前大多數RFID定位采用的是測量RSS值,但這些方法使用的是無線網絡模型。由于RFID系統傳播的特殊性,應考慮建立合適的射頻模型。(2)移動性:應考慮擁有靜態和動態讀寫器的混合系統,以增加收集數據的數量和多樣性。(3)可擴展性:在給定時間內確定讀寫器讀取標簽的數量、成功讀取標簽的速度、讀取速度對準確性的影響以及定位計算所需時間等,這些都是RFID定位技術的可擴展性要研究的問題。(4)矩陣:由于對系統設計的要求,RFID定位方案不能直接進行比較。引入矩陣概念,就可以針對系統的成本,進行較準確的比較。
















 工商網監
工商網監
評論