對(duì)變步長(zhǎng)(LMS)自適應(yīng)濾波算法進(jìn)行了討論,通過(guò)對(duì)Sigmoid函數(shù)修正,建立了步長(zhǎng)因子與誤差信號(hào)之間新的非線性函數(shù)關(guān)系。新函數(shù)在誤差接近零處具有緩慢變化的特性,克服了Sigmoid函數(shù)在自適應(yīng)穩(wěn)態(tài)
2010-04-26 16:12:54
1 引言 分析了Linux的實(shí)時(shí)性,針對(duì)其在實(shí)時(shí)應(yīng)用中的技術(shù)障礙,在參考了與此相關(guān)研究基礎(chǔ)上,從三方面提出了改善Linux實(shí)時(shí)性能的改進(jìn)措施。為提高嵌入式應(yīng)用響應(yīng)時(shí)間精度,提出兩種細(xì)化Linux
2021-11-02 09:00:15
實(shí)時(shí)仿真分享EasyGo技術(shù)路線主要是基于FPGA進(jìn)行開(kāi)關(guān)精確建模的方式,在保證1us小
步長(zhǎng)仿真
精度的前提下,盡量做到更多鏈?zhǔn)絊VG單元模塊的串聯(lián)。如下圖Demo模型,為容量12MVA,10KV的鏈?zhǔn)?/div>
2024-02-21 17:31:32
前言
本文將測(cè)試序列號(hào)的應(yīng)用,序列號(hào)功能可以讓每次下載的程序在指定的flash區(qū)域自動(dòng)增加(可以設(shè)置增加的位數(shù)),可以使用這種方式來(lái)自動(dòng)的給單片機(jī)編號(hào)。
序列號(hào)寫(xiě)入地址:0x8002000
測(cè)試環(huán)境
2023-05-13 22:48:04
也有所提高【關(guān)鍵詞】:自適應(yīng)濾波;;CLMS算法;;變步長(zhǎng);;凸組合【DOI】:CNKI:SUN:DZXU.0.2010-02-038【正文快照】:1引言凸組合最小均方(Convex
2010-05-04 08:09:01
人工智能和機(jī)器學(xué)習(xí)可以幫助組織提高網(wǎng)絡(luò)安全性的一些方法
2021-01-25 06:25:25
在嵌入式實(shí)時(shí)系統(tǒng)中,一般對(duì)實(shí)時(shí)性都具有很高的要求,那么什么是實(shí)時(shí)性呢?實(shí)時(shí)性:從事件發(fā)生到系統(tǒng)響應(yīng)的時(shí)間。但在實(shí)際的應(yīng)用編程中,有時(shí)往往會(huì)因?yàn)槟骋?b class="flag-6" style="color: red">段代碼使系統(tǒng)毫無(wú)實(shí)時(shí)性可言,那么影響實(shí)時(shí)性的因素都有
2022-06-21 16:32:15
變的相當(dāng)慢,大約現(xiàn)實(shí)中的十秒才對(duì)應(yīng)前面板顯示圖像的一秒。而且我拉出采集過(guò)程中(循環(huán)結(jié)構(gòu))的步長(zhǎng)i進(jìn)行檢測(cè),發(fā)現(xiàn)理論上來(lái)說(shuō)一直在進(jìn)行采集的步長(zhǎng)也會(huì)對(duì)應(yīng)方才說(shuō)的情況會(huì)突然變慢,現(xiàn)在一籌莫展希望能解答,多謝!
2016-05-27 08:52:10
本文提出一種基于協(xié)議的新方法,該方法不需要改造硬件、不需要額外占用資源,只需要對(duì)軟件作簡(jiǎn)單的修改就能升級(jí)RS-485通信系統(tǒng),提高從節(jié)點(diǎn)自主發(fā)送數(shù)據(jù)的能力,從而提高系統(tǒng)的通信效率和實(shí)時(shí)性。
2021-05-24 06:28:01
透鏡組實(shí)現(xiàn)寬視場(chǎng)(短焦)子系統(tǒng),同時(shí)要求該窄視場(chǎng)時(shí),視場(chǎng)變換透鏡組元不擋光。通過(guò)設(shè)計(jì)中波切換變倍光學(xué)系統(tǒng)實(shí)例,驗(yàn)證了所推導(dǎo)出的公式的可靠性。切換變倍系統(tǒng)能實(shí)現(xiàn)系統(tǒng)兩檔/三檔變倍,且視場(chǎng)間切換時(shí)間快,窄
2010-04-26 16:15:03
像素點(diǎn)賦予一個(gè)速度矢量的方法建立光流場(chǎng),利用光流場(chǎng)中矢量運(yùn)動(dòng)的連續(xù)性來(lái)檢測(cè)移動(dòng)目標(biāo)。該方法的計(jì)算量通常很大,難以實(shí)現(xiàn)實(shí)時(shí)性的檢測(cè)。2 FPGA實(shí)現(xiàn)本節(jié)實(shí)驗(yàn)將實(shí)現(xiàn)對(duì)鏡頭內(nèi)移動(dòng)物體(無(wú)論變大變小左右
2018-08-10 09:15:05
,基于 RCNN 改進(jìn)的 Fast R-CNN、Faster R-CNN 等在檢 測(cè)速度和精度上獲得進(jìn)一步提升,逐漸成為了目標(biāo)檢測(cè)的首選方法。R-CNN 系列目標(biāo)檢測(cè)算法是典型的兩階段目標(biāo)檢測(cè)算法,第一階段
2023-03-06 13:55:27
針對(duì)目前大型平行光管成像質(zhì)量監(jiān)測(cè)的現(xiàn)狀,本文提出了一種對(duì)平行光管進(jìn)行實(shí)時(shí)監(jiān)測(cè)的新方法,驗(yàn)證了這種監(jiān)測(cè)方法的可行性。該方法根據(jù)光管自準(zhǔn)檢測(cè)原理,采用小平面鏡對(duì)光管像質(zhì)進(jìn)行實(shí)時(shí)監(jiān)測(cè),計(jì)算了在一個(gè)焦深
2010-05-13 09:04:36
如何提高AD精度?
2015-09-27 12:35:59
, 導(dǎo)致這個(gè)低優(yōu)先級(jí)進(jìn)程遲遲得不到執(zhí)行,連累苦了我們的實(shí)時(shí)進(jìn)程。這樣就造成了優(yōu)先級(jí)的反轉(zhuǎn), 解決優(yōu)先級(jí)反轉(zhuǎn)也有很多辦法:主要有優(yōu)先級(jí)繼承與優(yōu)先級(jí)極限兩種, 原理都相同:此時(shí)迅速提高占有資源的低優(yōu)先級(jí)進(jìn)程
2020-07-08 15:41:55
PMU的原理是什么?如何提高數(shù)據(jù)采集系統(tǒng)的實(shí)時(shí)性與可靠性?
2021-05-12 06:45:42
如何提高電池監(jiān)測(cè)系統(tǒng)中的溫度測(cè)量精度及安全性
2021-03-11 06:35:40
如何提高轉(zhuǎn)換精度?
2022-01-27 07:56:27
如何優(yōu)化信號(hào)鏈來(lái)提高阻抗測(cè)量精度?放大發(fā)射級(jí)和接收級(jí)的直流偏置匹配如何選擇針對(duì)接收級(jí)優(yōu)化的I-V緩沖器來(lái)解決增加信號(hào)鏈的不準(zhǔn)確性
2021-04-13 06:57:26
如何在提高精度和延長(zhǎng)運(yùn)行時(shí)間的同時(shí)提高電池的安全性
2021-03-16 11:36:56
。基于 VxWorks 操作系統(tǒng),提出了基于VxWorks 的嵌入式實(shí)時(shí)PLC 設(shè)計(jì)的方法與應(yīng)用,利用VxWorks 的開(kāi)放性、模塊化和可擴(kuò)展性的系統(tǒng)結(jié)構(gòu)特性以及多線程/多任務(wù)的系統(tǒng)環(huán)境來(lái)達(dá)到高實(shí)時(shí)要求的PLC 控制,在保證實(shí)時(shí)性的同時(shí),如何才能實(shí)現(xiàn)多點(diǎn)位、復(fù)雜功能的PLC系統(tǒng)控制目標(biāo)?
2019-07-30 07:14:14
如何通過(guò)任務(wù)分割提高嵌入式系統(tǒng)的實(shí)時(shí)性?
2021-04-28 07:00:15
隨著工業(yè)的飛速發(fā)展,人們對(duì)系統(tǒng)實(shí)時(shí)性的要求越來(lái)越高。計(jì)算機(jī)技術(shù)的進(jìn)步客觀上也為進(jìn)一步提高實(shí)時(shí)性提供了可能。因此近年來(lái),嵌入式實(shí)時(shí)系統(tǒng)的研究已經(jīng)成為單片同應(yīng)用領(lǐng)域的又一大熱點(diǎn),實(shí)編排軟件也越來(lái)越多,有
2019-09-19 08:25:06
本帖最后由 fantek 于 2013-12-30 00:44 編輯
布爾指令序列狀態(tài)檢測(cè)與搜索1.實(shí)現(xiàn)的功能 參考:https://bbs.elecfans.com/jishu_372946_1_1.html2.程序運(yùn)行界面與框圖3.源程序下載[groupid=638]系統(tǒng)協(xié)同仿真[/groupid]
2013-10-12 19:48:25
提出一些提高此類增益級(jí)的抗噪性,同時(shí)降低其對(duì)電源變化和元件漂移的敏感性的方法。文章還會(huì)提供實(shí)測(cè)性能值和結(jié)果以展示精度范圍,方便最終用戶應(yīng)用進(jìn)行快速評(píng)估。
2019-08-08 07:27:32
【摘要】:在對(duì)一些變步長(zhǎng)LMS算法分析的基礎(chǔ)上,通過(guò)改變步長(zhǎng)公式中平方根運(yùn)算范圍,提出了一種改進(jìn)的變步長(zhǎng)LMS算法,并進(jìn)行了穩(wěn)定性分析.該算法比固定步長(zhǎng)算法收斂速度快,穩(wěn)定性好;與同類型復(fù)雜度其他
2010-04-26 16:10:44
研發(fā)中存在的周期長(zhǎng),自制硬件可靠性差等問(wèn)題。 圖:控制器快速原型2.基于FPGA的大步長(zhǎng)實(shí)時(shí)仿真算法電力電子系統(tǒng)仿真需要小步長(zhǎng)的本質(zhì)原因是需要及時(shí)的檢測(cè)到控制脈沖的跳變,并根據(jù)最新的脈沖電平高低來(lái)更新
2014-08-20 13:34:21
,并具有良好的普適性。因此,AVT31不是單純的視頻目標(biāo)取差器,而是一個(gè)完整的自動(dòng)視頻跟蹤系統(tǒng)解決方案。內(nèi)置多種圖像增強(qiáng)預(yù)處理算法:白熱、黑熱、雙極性、移動(dòng)目標(biāo)檢測(cè)等。視頻捕獲:可根據(jù)目標(biāo)的亮度、尺寸
2013-09-05 11:14:16
一些問(wèn)題:1.是否可以在ADC后面添加數(shù)字濾波器去提高精度?2. 是否可能在不使用微控制編程的前提下,去校準(zhǔn)ADC的gain error?3. 是否可以使用FPGA去校準(zhǔn)ADC的Gain error?如果以上問(wèn)題的回答有'是',請(qǐng)告知一些方法或者搜索關(guān)鍵詞,以便于他查找,謝謝.
2020-05-24 06:25:31
有沒(méi)有什么好的方法,提高實(shí)時(shí)性?我一開(kāi)始用的設(shè)備存儲(chǔ),那按鍵根本不能用(僅僅提高了沒(méi)有刷屏的效果。)后來(lái)我試圖把數(shù)據(jù)的刷新新建一個(gè)任務(wù),但還是刷新的時(shí)候花費(fèi)了大量的時(shí)間,導(dǎo)致按鍵檢測(cè)不到了,這個(gè)時(shí)候應(yīng)該用什么才能解決?
2019-04-04 06:36:24
提出了一種復(fù)雜背景下自動(dòng)、實(shí)時(shí)地檢測(cè)和跟蹤非剛體目標(biāo)算法。該算法利用自適應(yīng)的背景減除方法,在復(fù)雜背景條件下提取出運(yùn)動(dòng)目標(biāo);采用顏色直方圖模型為特征的均值平移
2008-12-13 02:04:57 6
6 為了滿足不同測(cè)控系統(tǒng)中傳感器輸出時(shí)間序列的實(shí)時(shí)濾波要求,針對(duì)小波變換不能遞推進(jìn)行的弱點(diǎn),通過(guò)分析小波實(shí)時(shí)濾波算法,研究了基于Mallat 快速離散小波變換的3 種實(shí)時(shí)濾波方法:
2009-04-07 09:48:1827 將時(shí)序數(shù)據(jù)有效地映射到特征空間是時(shí)間序列相似性搜索的一個(gè)關(guān)鍵問(wèn)題。文章結(jié)合時(shí)間序列符號(hào)化思想與分段線性表示中分段點(diǎn)選取的思想,提出一種基于特征點(diǎn)轉(zhuǎn)換的時(shí)間序列
2009-04-20 08:59:3437 提出一種視頻序列運(yùn)動(dòng)分割的實(shí)時(shí)方法,該方法通過(guò)兩次背景更新提取運(yùn)動(dòng)前景,其中長(zhǎng)程背景更新檢測(cè)噪聲運(yùn)動(dòng)區(qū)域,并將長(zhǎng)時(shí)間停留在場(chǎng)景中的物體納入背景范圍,短程背景更
2009-04-21 08:52:3024 介紹了兩種提高嵌入式Linux 操作系統(tǒng)實(shí)時(shí)性方法及其在實(shí)際中的應(yīng)用。可搶占式內(nèi)核利用改變中斷的調(diào)度機(jī)制和自旋鎖的運(yùn)行方法使Linux 的內(nèi)核變成可搶占式的。低延遲內(nèi)核在長(zhǎng)耗
2009-04-24 10:34:2314 提出了廣義合作目標(biāo)的概念及誤差空間估計(jì)方法,提高了光電跟蹤系統(tǒng)的跟蹤精度與平穩(wěn)性。該方法采用引導(dǎo)數(shù)據(jù)與引導(dǎo)誤差描述目標(biāo)的運(yùn)動(dòng),通過(guò)將目標(biāo)的機(jī)動(dòng)分散到引導(dǎo)數(shù)據(jù)
2009-05-10 12:05:1118 ADμC812 數(shù)據(jù)采集精度的軟件提高方法
2009-05-15 14:57:497 Mean Shift 是一種密度梯度的無(wú)參數(shù)估計(jì)方法,應(yīng)用于目標(biāo)跟蹤領(lǐng)域有較好的性能。然而Mean Shift 算法是一種半自動(dòng)跟蹤方法。為此,提出邊緣檢測(cè)與Mean Shift 相結(jié)合的方法。利用結(jié)
2009-05-27 15:23:1424 考慮了目標(biāo)跟蹤和航天測(cè)控中測(cè)量數(shù)據(jù)的實(shí)時(shí)剔野問(wèn)題。測(cè)量數(shù)據(jù)集合中嚴(yán)重偏離大部分?jǐn)?shù)據(jù)所呈現(xiàn)趨勢(shì)的小部分?jǐn)?shù)據(jù)點(diǎn)被稱為野值點(diǎn)。野值的剔除對(duì)提高目標(biāo)跟蹤精度有十分重要
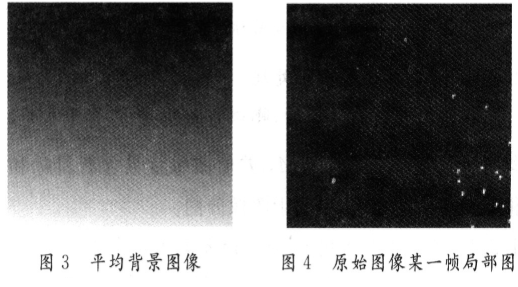
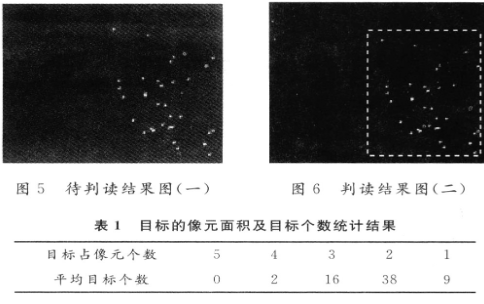
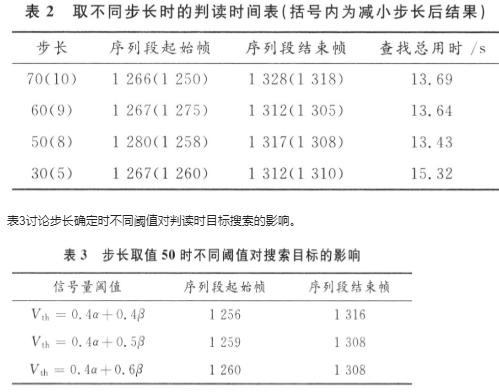
2009-07-13 09:42:0510 本文說(shuō)明了視頻判讀的基本工作原理,分析了在判讀過(guò)程中應(yīng)用到的幾種閾值分割方法的原理、性能和對(duì)判讀的影響,并提出了一種實(shí)用的閾值分割方法,結(jié)合實(shí)際應(yīng)用對(duì)提出的
2009-09-08 10:18:5419 在軟件失效機(jī)理分析的基礎(chǔ)上,提出了基于運(yùn)行序列的軟件故障診斷方法。該方法根據(jù)最近鄰思想,采用編輯距離在大量正常運(yùn)行中搜索故障運(yùn)行的最近鄰,利用故障運(yùn)行序列與最
2009-09-08 14:36:359 序列圖像運(yùn)動(dòng)目標(biāo)檢測(cè)的一種快速算法:研究了序列視頻圖像中運(yùn)動(dòng)目標(biāo)的檢測(cè)與跟蹤快速算法.研究基于Kalman濾波理論的漸消記憶最小二乘法,用該方法重建背景圖像;采用圖像差
2009-10-26 11:23:2337 該文提出了一種基于單通道圖像序列間協(xié)方差矩陣分解的動(dòng)目標(biāo)檢測(cè)方法。首先給出基于方位頻譜劃分獲取子圖像的處理過(guò)程,分析了子孔徑劃分在圖像序列間所產(chǎn)生的誤差來(lái)源,
2009-11-11 15:30:3914 該文提出一種新的最佳相關(guān)信號(hào),即偽隨機(jī)屏蔽序列偶,研究了其變換性質(zhì)和組合允許條件,運(yùn)用這些性質(zhì)和條件可以縮小偽隨機(jī)屏蔽序列偶的搜索范圍,提高計(jì)算機(jī)搜索的效率。
2009-11-19 16:43:489 該文提出了一種雙重壓縮后JPEG 圖像的原始量化步長(zhǎng)的估計(jì)方法。該方法根據(jù)兩次量化步長(zhǎng)之間的大小關(guān)系分3 種情況進(jìn)行討論。當(dāng)原始量化步長(zhǎng)大于第2 次量化步長(zhǎng),提出了直接利
2009-11-20 15:34:5218 在直擴(kuò)信號(hào)接收機(jī)中,為了提高碼跟蹤環(huán)的相位跟蹤精度,提出一種基于FPGA的新型偽碼序列產(chǎn)生方法,生成不同時(shí)序關(guān)系的高精度偽碼序列。該方法采用類似NCO 的原理,以相
2009-12-19 16:21:2918 該文主要研究了基于Hurst 指數(shù)與可變步長(zhǎng)LMS 算法相結(jié)合的分析方法在海雜波微弱目標(biāo)檢測(cè)中的應(yīng)用。一直以來(lái),分形理論與統(tǒng)計(jì)理論是分別應(yīng)用到目標(biāo)檢測(cè)中的,該文將分形可變步
2010-02-09 11:29:4316 為解決復(fù)雜環(huán)境下的諸如枝葉搖擺、攝像機(jī)抖動(dòng)等波動(dòng)式干擾對(duì)運(yùn)動(dòng)目標(biāo)檢測(cè)的影響問(wèn)題,該文提出基于視頻窗口切分與分類的序列圖像運(yùn)動(dòng)目標(biāo)檢測(cè)算法。首先將序列圖像切分為r
2010-02-09 11:34:2513 無(wú)人機(jī)編隊(duì)視頻序列中的多目標(biāo)精確跟蹤::針對(duì)無(wú)人機(jī)編隊(duì)視頻序列中的多目標(biāo)精確跟蹤的要求,使用STK(satellitetoolkit)三維建模軟件模擬無(wú)人機(jī)UA
2010-03-18 16:21:4019 該文提出了一種新的自動(dòng)目標(biāo)檢測(cè)算法,實(shí)現(xiàn)對(duì)自然場(chǎng)景圖像及高分辨率遙感圖像中結(jié)構(gòu)相對(duì)復(fù)雜的人造目標(biāo)的自動(dòng)檢測(cè)。該方法基于組成物體的幾何部件處理問(wèn)題,降低了對(duì)訓(xùn)
2010-06-23 14:12:4514 為解決工業(yè)生產(chǎn)中對(duì)鍋爐內(nèi)部水位的遠(yuǎn)程監(jiān)測(cè),本文設(shè)計(jì)了一種水位儀自動(dòng)判讀監(jiān)視系統(tǒng),并實(shí)現(xiàn)了此系統(tǒng)核心部件,即嵌入式視頻處理平臺(tái)。基于提出的多空間的、多小波變換的
2010-07-26 17:41:4427 本文對(duì)KURT_Linux、RT-Linux提高時(shí)鐘精度的方法進(jìn)行分析,采用一種動(dòng)態(tài)的多模式時(shí)鐘機(jī)制來(lái)提高Linux的時(shí)鐘精度,并通過(guò)分析測(cè)試證明該方案確實(shí)可行。
2011-05-20 09:39:48 6575
6575 
結(jié)合GPS定位和水聲定位,給出了一種實(shí)用的海底目標(biāo)定位方法。詳細(xì)分析了使用水面多點(diǎn)測(cè)量方法時(shí)的測(cè)量誤差,提供了具體的測(cè)點(diǎn)選擇建議。
2011-10-08 15:42:3620 文中在FFT基礎(chǔ)上,運(yùn)用高低通濾波器原理,采用精確計(jì)算得出多普勒頻率偏差的方法,從而提高了頻率、目標(biāo)速度的測(cè)量精度。計(jì)算機(jī)仿真和外場(chǎng)試驗(yàn)結(jié)果均表明了此方法的有效性。目前該
2011-12-16 14:42:1344 介紹了雷達(dá)目標(biāo)實(shí)時(shí)模擬在中頻實(shí)現(xiàn)的設(shè)計(jì)方法,討論了雷達(dá)目標(biāo)模擬系統(tǒng)的組成、功能以及雷達(dá)與其他分系統(tǒng)的關(guān)系,給出了雷達(dá)目標(biāo)實(shí)時(shí)模擬應(yīng)用的主要數(shù)學(xué)模型,并用實(shí)例驗(yàn)證了雷達(dá)
2012-02-29 11:42:575 文中在FFT基礎(chǔ)上,運(yùn)用高低通濾波器原理,采用精確計(jì)算得出多普勒頻率偏差的方法,從而提高了頻率、目標(biāo)速度的測(cè)量精度。計(jì)算機(jī)仿真和外場(chǎng)試驗(yàn)結(jié)果均表明了此方法的有效性。目前該
2012-03-09 14:51:2664 針對(duì)PMF-FFT偽碼捕獲算法在硬件資源有限情況下提高多普勒頻偏估計(jì)精度的問(wèn)題,提出一種新的兩輪搜索的方法-基于PMF-FFT-三頻點(diǎn)線性擬合兩輪并行搜索方法。文中從分析PMF-FFT捕獲算法
2012-07-06 16:29:560 自動(dòng)變步長(zhǎng)BLMS自適應(yīng)均衡的優(yōu)化實(shí)現(xiàn)_姜斌
2017-01-07 16:06:320 采用復(fù)合控制的移相諧振變流器提高系統(tǒng)穩(wěn)定精度的方法
2017-09-14 14:13:048 ,說(shuō)明這種方法在簡(jiǎn)化設(shè)計(jì)難度、提高設(shè)計(jì)速度和靈活性等方面的優(yōu)點(diǎn)和應(yīng)用價(jià)值。并提出了其仿真和FPGA實(shí)現(xiàn)的基本方法。 關(guān)鍵詞: DSP Builder;m序列;Gold序列;平衡Gold碼 在擴(kuò)展頻譜通信系統(tǒng)中,偽隨機(jī)序列起著十分關(guān)鍵的作用。在直接序列擴(kuò)頻系統(tǒng)的發(fā)射端,偽隨機(jī)序列擴(kuò)
2017-10-30 10:37:110 時(shí)間序列是一種常見(jiàn)的與時(shí)間有關(guān)的數(shù)據(jù),流式時(shí)間序列相對(duì)靜態(tài)時(shí)間序列而言,具有無(wú)窮、連續(xù)、實(shí)時(shí)和快速等特點(diǎn),在金融、傳感器網(wǎng)絡(luò)等領(lǐng)域廣泛存在,尤其是隨著大數(shù)據(jù)技術(shù)的發(fā)展,能夠采集、存儲(chǔ)更多的流式時(shí)間
2017-11-20 10:30:169 覆蓋整個(gè)待檢測(cè)低頻信號(hào)所在頻段的序列,來(lái)實(shí)現(xiàn)對(duì)軌道低頻信號(hào)的檢測(cè)。結(jié)合Duffing混沌系統(tǒng)檢測(cè)信號(hào)的優(yōu)越性,分析了利用變步長(zhǎng)陣發(fā)混沌法檢測(cè)低頻信號(hào)的可行性,給出了此方法檢測(cè)低頻信號(hào)的步驟,并從理論上計(jì)算了可發(fā)生陣發(fā)混沌的
2017-11-24 15:21:1712 集進(jìn)行去除冗余操作,搜索出最佳的u-shapelets集合;最后,利用最佳u-shapelets集合對(duì)原始數(shù)據(jù)集進(jìn)行轉(zhuǎn)化,達(dá)到提高時(shí)間序列聚類準(zhǔn)確率
2017-11-29 15:26:124 針對(duì)目前已有數(shù)據(jù)判讀方法在有效載荷地面集成測(cè)試中不適應(yīng)測(cè)試環(huán)境變化、實(shí)時(shí)判讀不連續(xù)、錯(cuò)誤率高的問(wèn)題,提出一種基于多Agent框架的實(shí)時(shí)自適應(yīng)判讀(MARAD)方法。首先,依據(jù)感知一決策一執(zhí)行
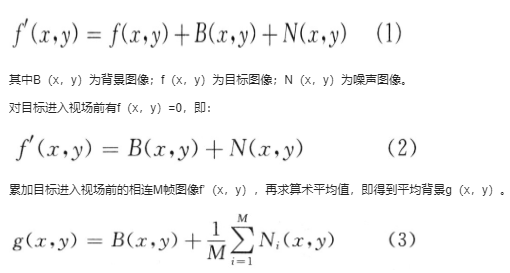
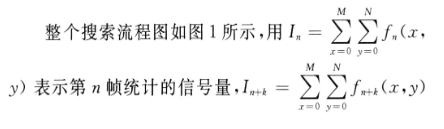
2017-11-30 10:24:330 視頻序列中運(yùn)動(dòng)目標(biāo)的檢測(cè)是目標(biāo)識(shí)別、標(biāo)記和追蹤的重要組成部分,背景減除法是運(yùn)動(dòng)目標(biāo)檢測(cè)中廣泛應(yīng)用的算法。針對(duì)光線變化、噪聲和局部運(yùn)動(dòng)等影響運(yùn)動(dòng)目標(biāo)檢測(cè)效果的問(wèn)題,提出一種基于背景減除法的視頻序列運(yùn)動(dòng)
2017-12-01 15:22:052 LMS自適應(yīng)濾波算法輸出誤差的平方項(xiàng)來(lái)調(diào)節(jié)步長(zhǎng),采用步長(zhǎng)值固定與變化相結(jié)合的方法,解決了自適應(yīng)濾波算法收斂速度慢、穩(wěn)態(tài)誤差大的問(wèn)題,適應(yīng)性得到提高,提高了語(yǔ)音信號(hào)通信質(zhì)量。該系統(tǒng)以TMS320VC5416和音頻編解碼芯片TLV320AIC23
2017-12-04 16:13:100 在全局中尋求優(yōu)化,以防落入局部最優(yōu);然后利用云模型對(duì)較好的布谷鳥(niǎo)巢位置局部?jī)?yōu)化來(lái)提高精度;最后將兩種方法對(duì)比得到相對(duì)更好的解作為最優(yōu)值以完成優(yōu)化。對(duì)比誤差估計(jì)值及多樣性指標(biāo),由5個(gè)常用多目標(biāo)測(cè)試函數(shù)仿真結(jié)果可知,CCMMOCS比傳統(tǒng)多目
2017-12-04 16:32:510 針對(duì)圖像序列中運(yùn)動(dòng)目標(biāo)檢測(cè)、跟蹤的難點(diǎn)問(wèn)題,提出了一種實(shí)時(shí)運(yùn)動(dòng)目標(biāo)檢測(cè)與跟蹤算法。該算法基于自適應(yīng)背景建模,獲取運(yùn)動(dòng)目標(biāo)背景模型和前景圖像,從而實(shí)現(xiàn)運(yùn)動(dòng)目標(biāo)檢測(cè);通過(guò)建立運(yùn)動(dòng)目標(biāo)的位置、大小、形狀
2017-12-12 17:35:353 為了改善在某些場(chǎng)景中由于聚焦評(píng)價(jià)函數(shù)非單峰性而造成爬山搜索方法正確率降低、誤差增大的問(wèn)題,設(shè)計(jì)了一種基于離焦量定性差異度量的自動(dòng)對(duì)焦方法。首先,利用基于空間域的卷積/去卷積變換計(jì)算對(duì)焦過(guò)程中兩個(gè)
2018-01-03 11:14:450 隨著社交網(wǎng)絡(luò)的興起,網(wǎng)民對(duì)信息資訊的速度和實(shí)時(shí)性提出了更高的要求。傳統(tǒng)搜索引擎通過(guò)費(fèi)時(shí)的網(wǎng)絡(luò)爬蟲(chóng)抓取網(wǎng)頁(yè),建立索引,這己遠(yuǎn)不能滿足用戶的需求。相比之下,實(shí)時(shí)搜索能直接從網(wǎng)絡(luò)捕獲數(shù)據(jù)流,從而更迅速地
2018-01-03 11:21:420 光伏電池的輸出特性具有強(qiáng)烈的非線性,最大功率點(diǎn)跟蹤技術(shù)能夠提高光伏系統(tǒng)的效率。常規(guī)定步長(zhǎng)算法在選取步長(zhǎng)時(shí)在響應(yīng)速度和穩(wěn)態(tài)精度之間無(wú)法兼顧。變步長(zhǎng)算法在同一光照強(qiáng)度具有良好性能,但在光照突變時(shí)存在
2018-03-06 15:34:593 針對(duì)螢火蟲(chóng)算法( FA)收斂速度慢和求解精度不高的問(wèn)題,提出一種基于均勻局部搜索和可變步長(zhǎng)策略的螢火蟲(chóng)優(yōu)化算法( UVFA)。首先,根據(jù)均勻設(shè)計(jì)理論建立局部搜索算子,對(duì)FA的搜索過(guò)程進(jìn)行改進(jìn),以提升
2018-04-17 14:35:190 針對(duì)連續(xù)波激光雷達(dá)在同步測(cè)量目標(biāo)距離和速度的應(yīng)用中存在輻射信號(hào)上限峰值功率低、測(cè)量極限距離近的問(wèn)題,提出一種基于Golomb脈沖序列調(diào)制的測(cè)量信號(hào)波形,研究該方法在道路環(huán)境中同步測(cè)量目標(biāo)距離和速度
2018-04-17 15:37:230 基于實(shí)時(shí)物體移動(dòng)的靜態(tài)圖像背景中移動(dòng)目標(biāo)檢測(cè)是計(jì)算機(jī)視覺(jué)領(lǐng)域的研究熱點(diǎn),在安防、監(jiān)控、智能交通、機(jī)器智慧、以及軍事領(lǐng)域等社會(huì)生活和軍事防御等諸多領(lǐng)域都有較大的實(shí)用價(jià)值。移動(dòng)目標(biāo)檢測(cè)的實(shí)質(zhì)是從實(shí)時(shí)圖像序列中將圖像的變化區(qū)域從整體圖像中分割提取出來(lái)。
2018-04-20 15:50:004695 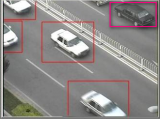
具體來(lái)說(shuō),我們提出一種用于設(shè)計(jì)移動(dòng)端的CNN模型的自動(dòng)神經(jīng)結(jié)構(gòu)搜索方法,稱之為Platform-Aware神經(jīng)結(jié)構(gòu)搜索。圖1是Platform-Aware神經(jīng)結(jié)構(gòu)搜索方法的總體視圖,它與以前的方法
2018-08-07 14:10:033610 提出了一種從攝像頭獲取的彩色圖像中準(zhǔn)確地檢測(cè)出運(yùn)動(dòng)目標(biāo)并進(jìn)行實(shí)時(shí)跟蹤的算法。首先將采集到的彩色視頻圖像序列轉(zhuǎn)化為灰度圖像, 研究了幾種圖像銳化方法并進(jìn)行了比較。然后進(jìn)行幀間差分和閾值分割, 成功分離
2019-11-27 15:02:5612 為了從灰度圖像序列中精確提取出運(yùn)動(dòng)目標(biāo), 提出了一種從灰度圖像序列中提取運(yùn)動(dòng)目標(biāo)的算法———平滑模板對(duì)準(zhǔn)相乘法。該方法能很好跟蹤和識(shí)別圖像序列中的運(yùn)動(dòng)目標(biāo), 并準(zhǔn)確地將其提取出來(lái)。試驗(yàn)證明, 該算法提取出的運(yùn)動(dòng)目標(biāo)失真度小, 誤檢率低, 性能比常用的差值法明顯優(yōu)越。
2019-12-06 13:55:009 為對(duì)激光掃描儀與數(shù)碼相機(jī)中的數(shù)據(jù)進(jìn)行有效配準(zhǔn),提岀一種基于中心投影的多幅點(diǎn)云數(shù)據(jù)與紋理序列自動(dòng)配準(zhǔn)方法。對(duì)多幅局部點(diǎn)云數(shù)據(jù)進(jìn)行預(yù)處理操作,實(shí)現(xiàn)多幅局部點(diǎn)云數(shù)據(jù)配準(zhǔn),形成一幅完整的點(diǎn)云數(shù)據(jù)釆用中心投影
2021-03-18 10:42:415 自動(dòng)化深度學(xué)習(xí)是目前深度學(xué)習(xí)領(lǐng)域的研究熱點(diǎn),神經(jīng)架構(gòu)搜索算法是實(shí)現(xiàn)自動(dòng)化深度學(xué)習(xí)的主要方法之一,該類算法可以通過(guò)對(duì)搜索空間、搜索策略或優(yōu)化策略進(jìn)行不同定義來(lái)自動(dòng)設(shè)計(jì)神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)。闡述進(jìn)化算法和進(jìn)化
2021-03-22 14:37:0615 為了提高短時(shí)交通流速度預(yù)測(cè)的精度,提岀∽種基于改進(jìn)夭牛須算法優(yōu)化的確定性跳躍循環(huán)狀態(tài)網(wǎng)絡(luò)的交通流預(yù)測(cè)模型。首先對(duì)交通流速度序列進(jìn)行渾沌性分析,重構(gòu)序列的相空間,將對(duì)交通流速度序列的硏究映射到其所
2021-05-31 11:51:283 AN059 提高ADC采樣精度的方法
2023-03-01 18:50:1414 我們都知道,用戶在使用應(yīng)用程序時(shí)候,對(duì)于速度有著越來(lái)越高的要求,真可謂是“一秒也等不及”。而開(kāi)發(fā)團(tuán)隊(duì)又該怎樣來(lái)滿足這種對(duì)于實(shí)時(shí)性的期望呢?文章速覽:RedisEnterprise實(shí)時(shí)搜索的應(yīng)用場(chǎng)
2023-11-26 08:05:43129 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論